Изобретение относится к обработке металлов давлением, в частности, к кузнечно-прессовому оборудованию, и может быть использовано в гвоздильных автоматах.
Цель изобретения - повьшение производительности и расширение технологических возможностей
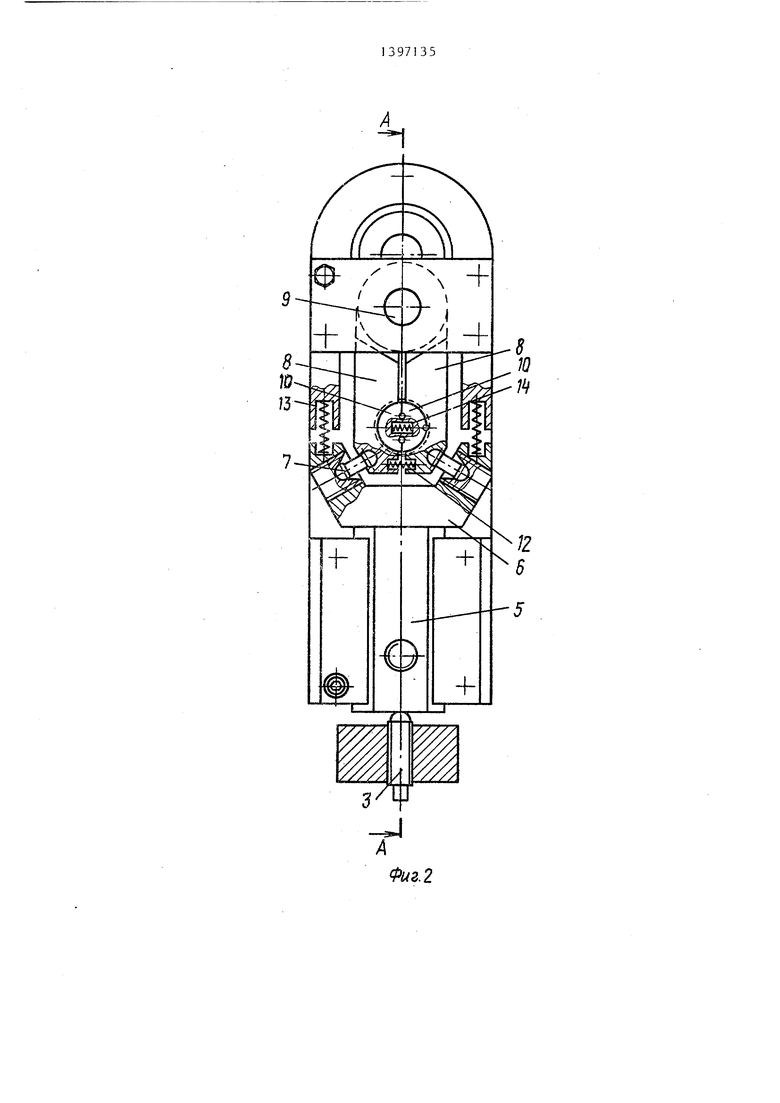
На фиг.1 показана кинематическая схема предлагаемого механизмаi на фиг.2 - механизм зажима гвоздильного автомата, общий вид , на фиг.З - разрез А-А на фиг.2.
Механизм зажима гвоздильного автомата состоит из кулачка 1, расположенного на коленвале, рычага 2, регулировочного винта 3, матричного блока, в который входят корпус 4, полность путем применения двухручейных полуматриц и расширить технологические возможности автоматов, а также обеспечивает стабильность регулировки величины хода полуматриц.
Формула изобретения
1. Механизм зажима гвоздильного автомата, содержащий смонтированные на станине рычажно-кулачковый привод с толкателями, матричньш блок, состоящий из корпуса, подпружиненной ползушки, полуматриц с ручьями и регулировочных винтов, о тличающи й- с я тем, что, с целью повьш1ения производительности и расширения технологических возможностей, матричньй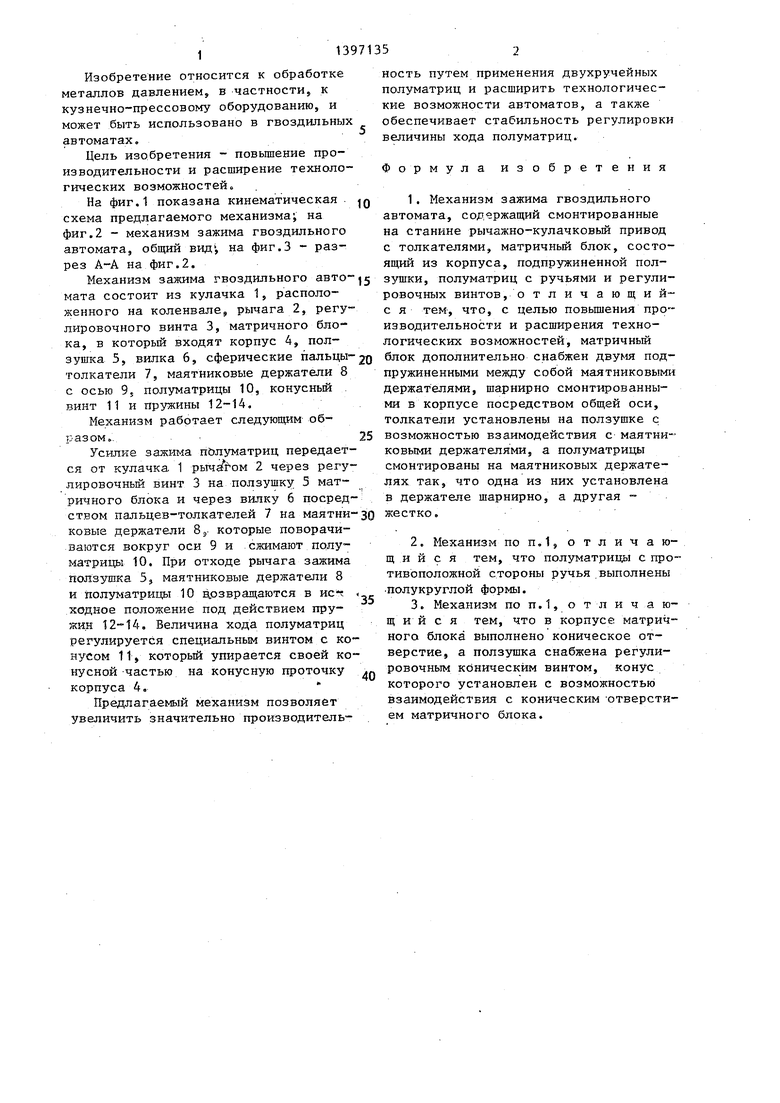
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм зажима проволоки гвоздильного автомата | 1989 |
|
SU1717269A1 |
| Механизм зажима гвоздильного автомата | 1989 |
|
SU1645056A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ГВОЗДЕЙ | 1992 |
|
RU2019351C1 |
| МЕХАНИЗМ ЗАЖИМА ПРОВОЛОКИ К ГВОЗДИЛЬНОМУ | 1973 |
|
SU387770A1 |
| Ротационно-обжимное устройство | 1977 |
|
SU742024A1 |
| Устройство для развальцовки концов труб на конус | 1990 |
|
SU1784367A1 |
| Механизм зажима проволоки кгВОздильНОМу АВТОМАТу | 1979 |
|
SU827222A1 |
| Автомат для изготовления деталей из проволоки | 1972 |
|
SU444592A1 |
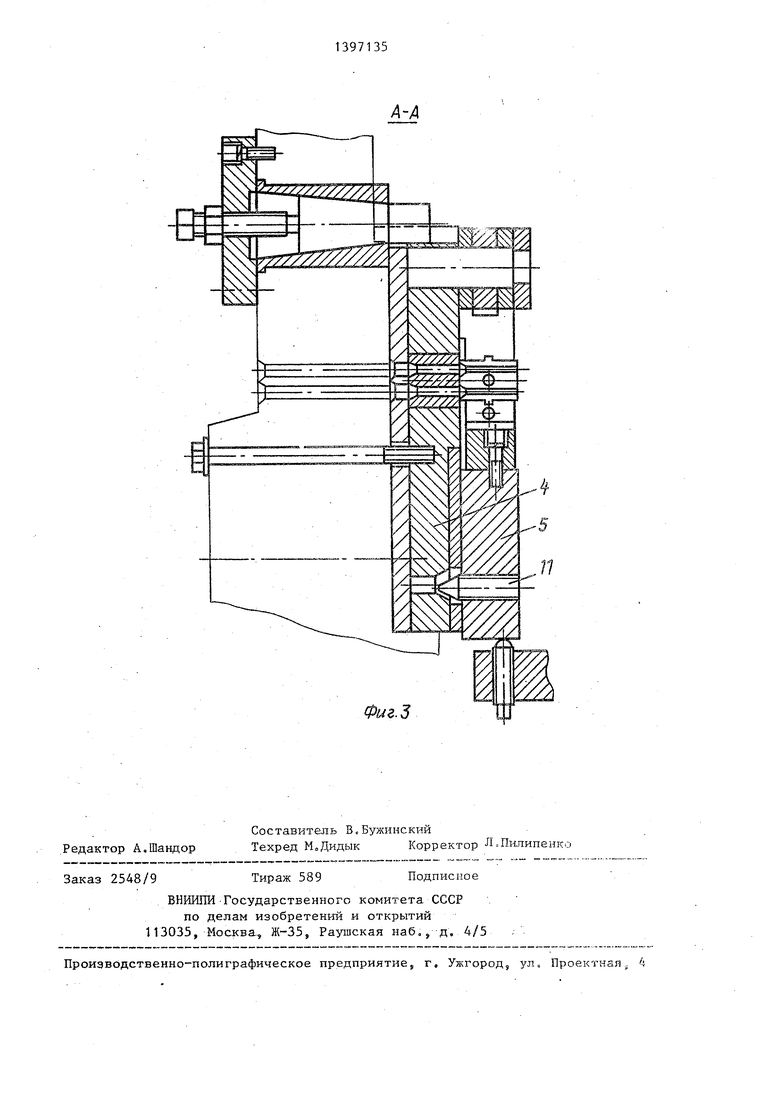
Изобретение относится к кузнеч- Ho-npeccoBOi iy оборудованию и позволяет ловысить производительность и расяпирить технологические возможности автомата. Усилие зажима полуматриц передается от кулачка 1 рычагом 2 через регулировочный винт 3 на лолзуш- ку 5 матричного блока и через вилку 6 посредством пальцев-толкателей 7 на маятниковые держатели 8, которые поворачиваются вокруг оси 9 и сжимагот полуматрицы 10. При отходе рычага зажима 2 ползушка 5, маятниковые держатели 8 и полуматрицы 10 возвращаются в исходное пололсение под действием 12, 13 и 14. Величина хода полуматриц регулируется специальным, винтом с KOHycoMj который упирается своей конус ной частью в конусную проточку корпуса. 2 3,11, , 3 ил. и /V со Г) СО ел
зушка 5, вилка 6, сферические пальцы-2о блок дополнительно снабжен двумя под- толкатели 7, маятниковые держатели 8 пружиненными между собой маятниковыми с осью 9, полуматрицы 10, конусньй держателями, шарнирно смонтированны- винт 11 и 12-14,ми в корпусе посредством общей оси,
Механизм работает следующим образом.:. , 25
Усилие зажима полуматриц передается от кулачка 1 2 через регулировочный винт 3 на ползушку 5 матричного блока и через вилку 6 посредтолкатели установлены на ползушке с возможностью взаимодействия с маятниковыми держателями, а полуматрицьт смонтированы на маятниковых держателях так, что одна из них установлена в держателе шарнирно, а другая - жестко,
ством пальцев-толкателей 7 на маятни ковые держатели 8j- которые поворачиваются вокруг оси 9 и .сжимают полуматрицы 10, При отходе рычага зажима ползушка 5j маятниковые держатели 8 и полуматрицы 10 возвращаются в .ходкое положение под действием пружин 12-14, Величина хода полуматриц регулируется специальным винтом с конусом 11, который упирается своей конусной -частью на конусную проточку корпуса 4,
Предлагаемый механизм позволяет увеличить значительно производитель
толкатели установлены на ползушке с возможностью взаимодействия с маятниковыми держателями, а полуматрицьт смонтированы на маятниковых держателях так, что одна из них установлена в держателе шарнирно, а другая - жестко,
Фиг.
| Механизм зажима проволоки кгВОздильНОМу АВТОМАТу | 1979 |
|
SU827222A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
