1
Изобретение относится к высадочному оборудова-пию с разъемными матрицами.
Известен механизм зажима проволоки к гвоздильному автомату, содержащий две матрицы, одна из которых неподвижно закреплена в корлусе, а другая - установлена Б .перемещаемом по направляющим корпуса ползуне, приводимом в движение посредством шарнирно закрепленного в корпусе качающегося ;рычага и взаимодействующего с ним нажимного пальца.
Однако в известном механизме точки приложения сил на «ажимном пальце и зажимной матрице лежат не в одной плоскости, что создает крутящий момент, вызывающий односторонний износ рабочих элементов, кроме того, они предохранены от возможных перегрузок.
С целью повыщения надежности и долговечности предлагаемый механизм снабжен смонтированным на неподвижно закрепленной между нажимным пальцем и ползуном оси и взаимодействуюп1,им с ними дополнительным рычагом тарированного сечения, взаимодействующим на установленный в корпусе параллельно нажимному пальцу иод-пружиценныГ толкатель, связанный с выключателем останова автомата.
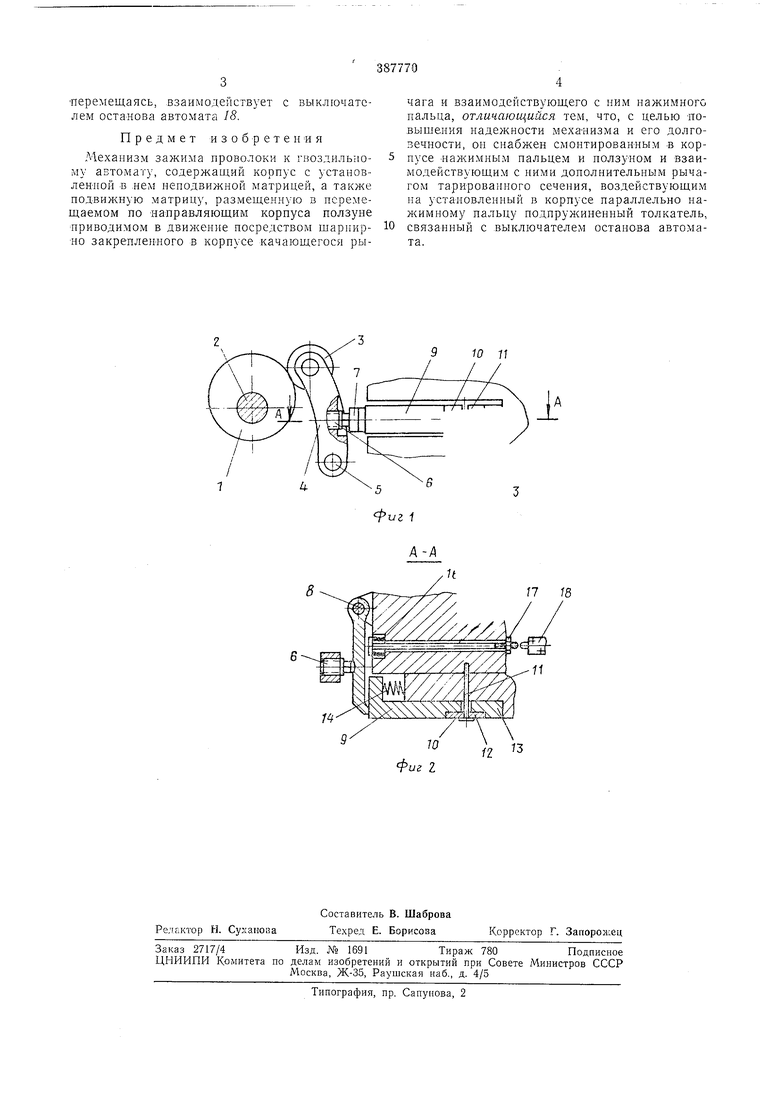
На фиг. 1 представлен предлагаемый механизм, общий вид; на фиг. 2 - разрез по А-А на ф.иг. 1.
Механизм состоит из кулачка 1, установленного на кулачковом валу 2, ролика 3, закрепленного на рычаге 4 носредством оси 5. На заданном расстоянии от ролика закреплен винт 6, взаимодействующий с дополнительным рычагом 7 тарированного сечения, установленным на оси 8 и передающим движение ползуну 9, несущему подвижную матрицу 10, прижимающую изделие 11 к неподвижной матрице 12, закрепленной в плите 13. Ползун 9 подпружинен пружиной 14. Для предохранения от .перегрузки установлен толкатель 15, поднружиненный нружиной 16 и регулируемой гай.кой 17 и воздействующий с выключателем
останова автомата 18.
Описываемый меха.низм работает следующим образом.
Приводной вал 2 с кулаком / ролик 3 передает качательное движение рычагу 4, который, поворачиваясь вокруг неподвижной оси 5 через винт 6, рычаг 7, приводит в движение ползун 9 с закрепленной на нем подвижной матрицей 10, прижимающей изделие 1} к неподвижной матрице 12. В исходное положение система рычагом возвращается пружиной 14, находящейся при зажатом изделии 11 в сжатом состоянии. При превышении заданного усилия зажима рычаг 7 прогибается под действием винта 6 и нажимает на головку регулируемого гайкой 17 толкателя /5, который, перемещаясь, взаимодействует с выключателем останова автомата 18. Предмет изобретен ия Механизм зажима проволоки к гвоздильному автомату, содержащий корпус с установлешюй в .нем неподвижной матрицей, а также подвижную матрицу, размещенную в перемещаемом по направляющим корпуса ползуне приводимом в движение посредством щарнирно закрепленного в корпусе качающегося рычага и взаимодействующего с ним нажимного пальца, отличающийся тем, что, с целью повышения надежности меха низма и его долговечности, он снабжен смонтированным в корпусе нажимным пальцем и ползуном и взаимодействующим с ними дополнительным рычагом тарированного сечения, воздействующим па установленный в корпусе параллельно нажимному пальцу подпружиненный толкатель, связанный с выключателем останова автомата.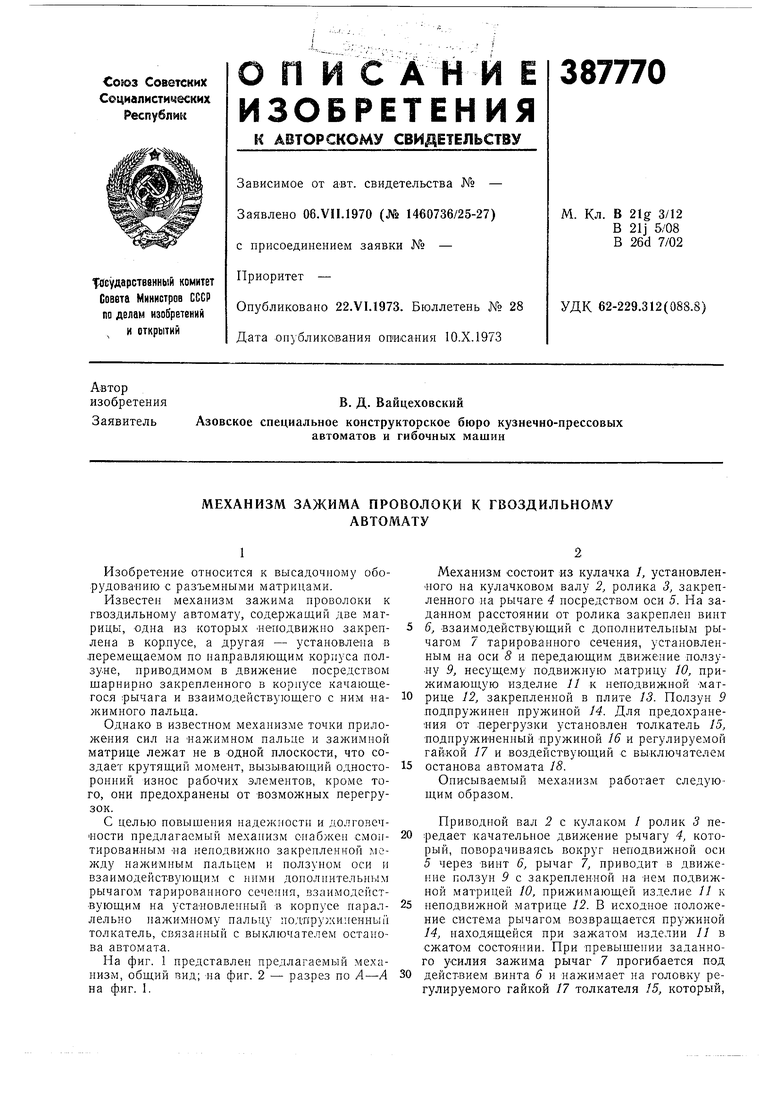
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм зажима проволоки кгВОздильНОМу АВТОМАТу | 1979 |
|
SU827222A1 |
| Механизм зажима проволоки гвоздильного автомата | 1989 |
|
SU1717269A1 |
| Гвоздильный автомат | 1978 |
|
SU820998A1 |
| Гвоздильный автомат | 1982 |
|
SU1121085A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| Проволочно-гвоздильный автомат | 1977 |
|
SU766716A1 |
| Автомат для изготовления гнутых изделий | 1986 |
|
SU1400739A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| Механизм зажима гвоздильного автомата | 1989 |
|
SU1645056A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
8
П 18
