оо со
4
О
го
Изобретение относится к подъемно- транспортному машиностроению, в частности к приводам грузоподъемн1з1х машин, нре- имущественно вертикальных конвейеров с предохранительными устройствами.
Цель изобретения - расн ирение функ- циональных возможностей за счет ограничения и контроля г узового момента неременного направления.
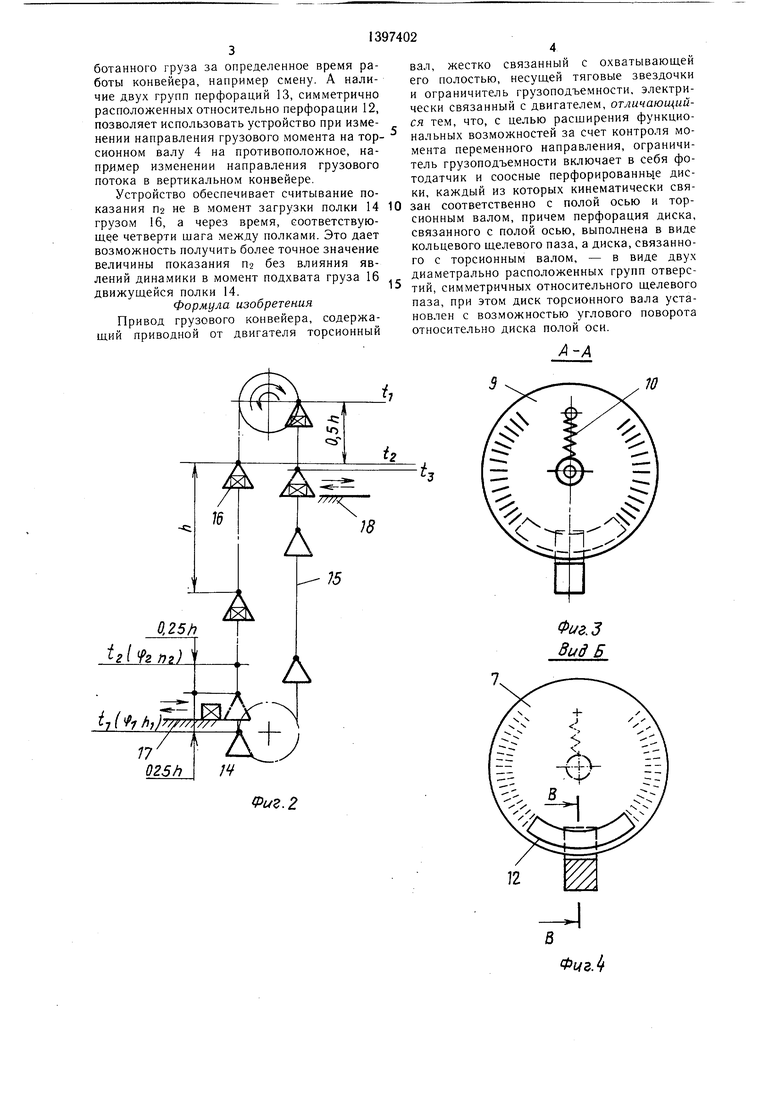
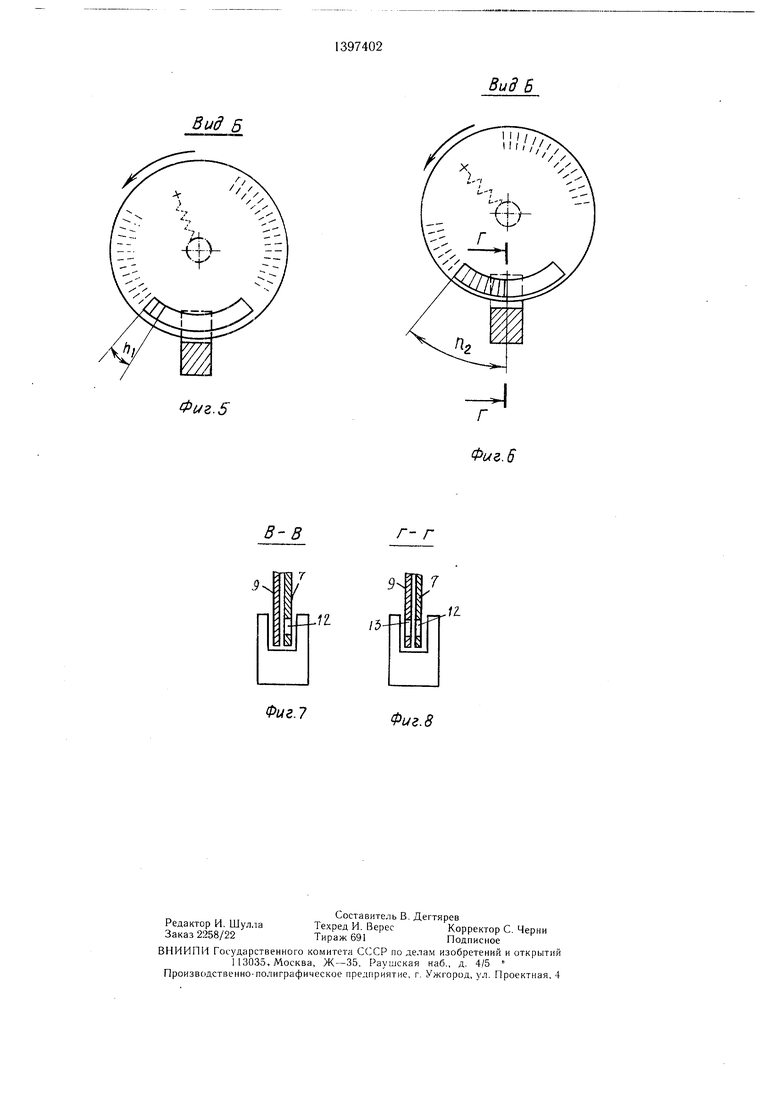
На фиг. 1 изображен привод грузового конвейера; на фиг. 2 - то же, вид на ходо- вую часть конвейера со стороны привода; на фиг. 3 - разрез -А на фиг. 1; на фиг. 4 - вид Б на фиг. 1 (перфорированные диски в исходном положении); на фиг. 5 - то же, перед загрузкой полки; на фиг. 6 - то же, после загрузки пол- ки; на фиг. 7 - разрез В---В на фиг. 4, перфорации не совмеш.(;ны; на фиг. 8 - разрез Г-Г на фиг. 6, перфорации совмещены (засвечены) .
Привод грузового конвейера содержит полую ось I, Hecyuj,yio закрепленные на ней звездочки 2, врашающуюся в опорах 3. Внутри полой оси 1 расположен жестко связанный с ней одним концом торсионный вал 4, второй конец которого связан с двигателем 5. Зубчатая передача 6 соедини- ет полую ось 1 с перфорированным диском 7, а Зубчатая передача 8 - торсионный вал 4 с. соосным перфорированным .диском 9 через пружинное демпферное устройство 10, т.е. диск торсионного вала установлен с возможностью углового пово- рота относительно диска полой оси. Оба соос- ных вращаю1цихся перфорированных диска 7 и 9 взаимодействуют с общим фотодатчиком 11.
Перфорация 12 диска 7 полой оси 1 выполнена в виде кольцевого щелевого паза. Перфорация 13 диска 9 торсионного вала 4 выполнены по контуру диска в виде двух групп узких отверстий, симметрично расположенных относительно щелевого паза 12 (широкой перфорации) диска 7. Зубчатые передачи б и 8 имеют одинаковое переда- точное число, обеспечпвающее, например, два оборота дисков 7 и 9 при перемещении полки 14 на один шаг h. Полки 14 закреплены шарнирно на вертикально замкнутых цепях 5 и равномерно с шагом h и предназначены для перемещения груза 16, загружаемого и разгружаемого механизмами загрузки 17 и разгрузки 18.
Привод работает следующим образом.
В исходном положении полки 14 непод- нижны и свободны от груза 16. Грузовой момент на торсионном валу 4 равен нулю, двигатель 5 обесточен. Перфорации 13 диска 9 разещены симметрично по широкой перфорации 12 диска 7. Совмещенных (засвеченных) перфораций нет. При включении двигателя 5 через торсионный вал 4 приводится во вращение полая ось 1 с закрепленными на ней звездочками 2,
0
Q 5
5 0
5 5
0 5
которые перемен1ают грузовые цепи 15 с порожними полками 14.
При подходе первой порожней полки 14, подлежащей загрузке, к механизму 17 загрузки, например, за четверть шага до момента взятия груза (момент ti) широкая перфорация 12 совмещается с фотодатчиком 11, который начинает считывать совмещенные перфорации 13 диска 9 и выдает показание П: (число импульсов). Так как в этот момент (момент ii) все полки 14 еще порожние, то показание П; определяет грузовой момент на торсионном валу 4 и соответствующий е.му угол скручивания ф|, необходимый на преодоление трения незагруженной ходовой части (цепи 15 с полка.ми 14) вертикального конвейера. Далее полка 14 подходит к .механиз.му 17 загрузки, на ходу подхватывает груз 16 и продолжает подниматься вверх. Когда полка 14 с грузом 16 оказывается на расстоянии, напри.мер, четверти шага (момент 12) над механизмом загрузки, перфорация 12 диска 7 вновь совмещается с фотодатчиком II, который считывает совмещенные перфорации 13 и выдает показание П2 (число импульсов), пропорциональное грузовому мо.менту на торсионно.м валу 4 в момент tv. Показание П2 фотодатчика 11 поступает, например, в микропроцессор, который анализирует его и, если его величина превышает преде.чьно допустимую Eje.H4HHy грузового момента, дает сигнал на отк.аючелие привода 5, после чего вся ходовая часть вертикального конвейера останавливается. Микропроцессор также анализирует разницу показаний П2-П| Дп, которая характеризует разницу грузовых моментов до и после загрузки груза 16. Загрузка носледуюплих полок 14 происходит в том же порядке.
Показания П| и nv фотодатчика 11 учитывают при этом не только .омент трения ходовой части конвейера, но и массу предварительно загруженных полок. Однако разница показаний . д п для каждой из загружае.мых полок 14 пропорциональна .массе загруженн ого груза 16 в полку 14. При этом разница показаний Дп определяется только ма.ссой груза, загружаемого в период ti-tz, так как все остальные полки 14 в этот период перемещаются только вертикально и грузовой момент на торсионном валу 4 не изменяют, а момент разгрузки полки 14 (момент t2) выносится за этот период. Наличие пружинного демпфера 10 .между торсионным валом 4 и перфорированным диском 9 делает показания П| и П2 устойчивыми, так как гасит возможные колебания. Достижение максимального значения показания пз соответствует предельно допустимому грузовому моменту на торсионном валу 4 и предупреждает о перегрузке привода 5, в результате чего происходит его отключение..
Суммарное значение показаний Дп (ЕЛп) позволяет контролировать массу переработанного груза за определенное время работы конвейера, например смену. А наличие двух групп перфораций 13, симметрично расположенных относительно перфорации 12, позволяет использовать устройство при изменении направления грузового момента на торсионном валу 4 на противоположное, на- прлмер изменении направления грузового потока в вертикальном конвейере.
Устройство обеспечивает считывание показания П2 не в момент загрузки полки 14 грузом 16, а через время, соответствующее четверти шага между полками. Это дает возможность получить более точное значение величины показания П2 без влияния явлений динамики в момент подхвата груза 16 движущейся полки 14.
Формула изобретения Привод грузового конвейера, содержащий приводной от двигателя торсионный
вал жестко связанный с охватывающей его полостью, несущей тяговые звездочки и ограничитель грузоподъемности, электрически связанный с двигателем, отличающийся тем что, с целью расщирения функцио- нааьны х возможностей за счет контроля момента переменного направления, ограничитель грузоподъемности включает в себя фотодатчик и соосные перфорированные диски каждый из которых кинематически связан соответственно с полой осью и торсионным валом, причем перфорация диска, связанного с полой осью, выполнена в виде кольцевого щелевого паза, а диска, связанного с торсионным валом, - в виде двух диаметрально расположенных групп отверстий, симметричных относительного щелевого паза, при этом диск торсионного вала установлен с возможностью углового поворота относительно диска полой оси.
А-А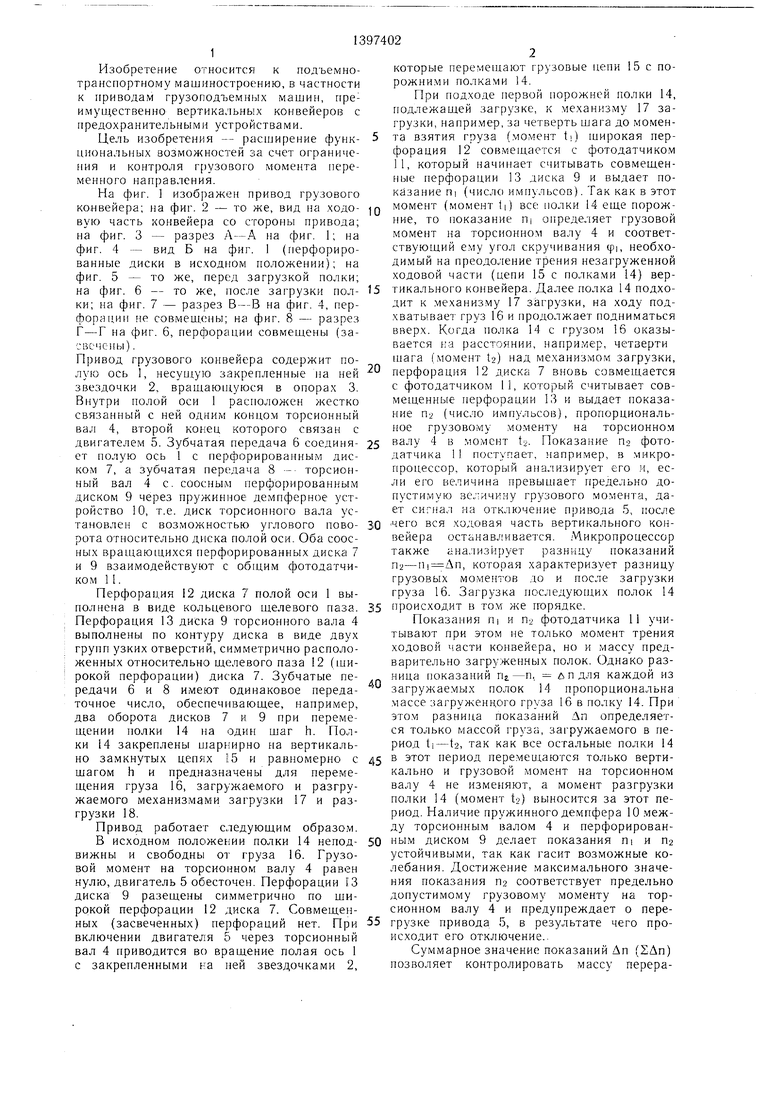
| название | год | авторы | номер документа |
|---|---|---|---|
| Элеваторный склад | 1984 |
|
SU1191372A1 |
| Устройство для центрирования и выдачи длинномерных цилиндрических изделий | 1986 |
|
SU1328261A1 |
| Ленточный конвейер | 1982 |
|
SU1022878A1 |
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547378A1 |
| Пробоотборник | 1989 |
|
SU1727023A2 |
| Склад для хранения крупногабаритных грузов | 1981 |
|
SU1018884A1 |
| Система для погрузки и выгрузки пакетированных грузов из транспортного средства | 1982 |
|
SU1129103A1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| Система для пакетирования грузов на поддоны и их транспортирования | 1985 |
|
SU1375543A1 |
| Элеваторный склад | 1982 |
|
SU1022874A1 |
Изобретение относится к подъемно- транспортному машиностроению и может быть реализовано в конструкции приводов грузоподъемных машин или транспортеров с предохранительными устройствами. Цель изобретения состоит в расширении функциональных возможностей привода путем ограничения и контроля грузового момента переменного направления. Привод грузового конвейера содержит полую ось 1, несущую тяговые звездочки 2. Полая ось 1 жестко связана с торсионным валом 4, приводимым от двигателя 5. Устройство снабжено ограничителем грузового момента или грузоподъемности, выполненным в виде фотодатчика Пи двух соосно установленных перфорированных дисков 7 и 9. Каждый диск через зубчатые передачи 6 и 8 связан с торсионным валом и полой осью. Причем перфорация диска, связанного с полой осью, выполнена в виде щелевого кольцевого паза, а перфорация диска, связанного с торсионным валол1, выполнена в виде двух противоположно расположенных групп отверстий, симметричных относительно щелевого паза. При этом диск, связанный с торсионным валом соединен с шестерней 8 через пружинное демпферное устройство 10. При загрузке грузовой ветви конвейера крутящий момент на торсионном валу вызывает его угловую деформацию, которая вызывает рассогласование во взаимном угловом положении дисков 7 и 9, что фиксируется фотодатчиком, а выработанный в результате этого сигнал выдается через преобразователь в цепь управления работой двигателя. 8 ил. о (Л
Фиг. 2
Фиг.З Вид Б
М
0t/3.4
Вид 5
Ф(г.5
В В
м
Фиг.7
Вид В
Фиг. 6
г- г
м.
Фиг. 8
| Ограничитель грузоподъемности | 1976 |
|
SU592720A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
