Изобретение относится к подъемно-тран спортному оборудованию, в частности к складам для хранения тяжелых, крупногабаритных грузов в специальных контейнерах, и может быть применено .в качестве складов готовой продукции или цеховых складов для хранения заготовок, например, в судостроительной промышленности или в промышленности тяжелого машиностроения.
Известен склад для хранения крупногабаритных грузов, содержащий многоярусные стеллажи, установленные на полКи стеллажей контейнеры для грузов, имеющие с противоположных сторон в нижней части выступы, и кран-штабелер, на колонне, которого смонтирована платформа, снабженная двумя расположенными в вертикальных параллельных плоскостях приводными цепными контурами, имеюшими захваты для контейнеров, взаимодействуюшие с упомянутыми выступами.
Известный склад обеспечивает хранение контейнеров с тяжелыми крупногабаритными грузами 1.
Однако этот склад имеет значительные зазоры по вертикали между контейнерами в связи с тем, что установка цепных контуров в вертикальной плоскости требует подвода захватов снизу для взаимодействия с выступами контейнеров. Увеличение зазоров по вертикали уменьшает емкость склада. Кроме того, этот склад не приспособлен для установки контейнеров с наклоном.
Известен также склад для хранения крупногабаритных грузов, содержащий многоярусные стеллажи, установленные на полки стеллажей контейнеры для грузов, имеющие с противоположных сторон в нижней части выступы и кран-штабелер, на колонне которого смонтирована грузоподъемная платформа, снабженная двумя расположенными параллельно друг другу в горизонтальной плоскости приводными цепными контурами, к каждому из которых прикреплены захват и толкатель, взаимодействующие с контейнером.
Известный склад имеет более высокую емкость за счет возможности уменьшения зазоров по вертикали между контейнерами 2.
Однако в известном складе не обеспечивается возможность наклона контейнера на платформе в ту или иную сторону при загрузке стеллажей, что необходимо в некоторых случаях в связи с тем, что полки стеллажей могут иметь уклон в сторону задней части стеллажей для того, чтобы контейнер на полке мог занять устойчивое положение. Это снижает удобство эксплуатации склада, так как обеспечивает только горизонтальное хранение и перемещение контейнера.
Целью изобретения является повышение удобства эксплуатации.
Цель достигается тем, что на складе для хранения крупногабаритных грузов, содержащем многоярусные стеллажи, установленные на полки стеллажей контейнеры для гру
зов, имеющие с противоположных сторон в нижней части выступы, и кран-штабелер, на колонне которого смонтирована грузоподъемная платформа, снабженная двумя расположенными параллельно друг другу в горизонтальной плоскости приводными цепными контурами, к каждому из которых прикреплены захват и толкатель, взаимодействующие с контейнером, платформа смонтирована на колонне с возможностью поворота в вертикальной плоскости, при этом захват снабжен защелкой для взаимодействия с упомянутыми выступами контейнера, который имеет дополнительные выступы, а на платформе установлены пары подвижных от привода упоров для взаимодействия каждой из них с соответствующим
0 дополнительным выступом.
На фиг. 1 показан склад, общий вид (колонна крана-штабелера и полки стеллажей условно не показаны); на фиг. 2 - грузоподъемная платформа и контейнер,
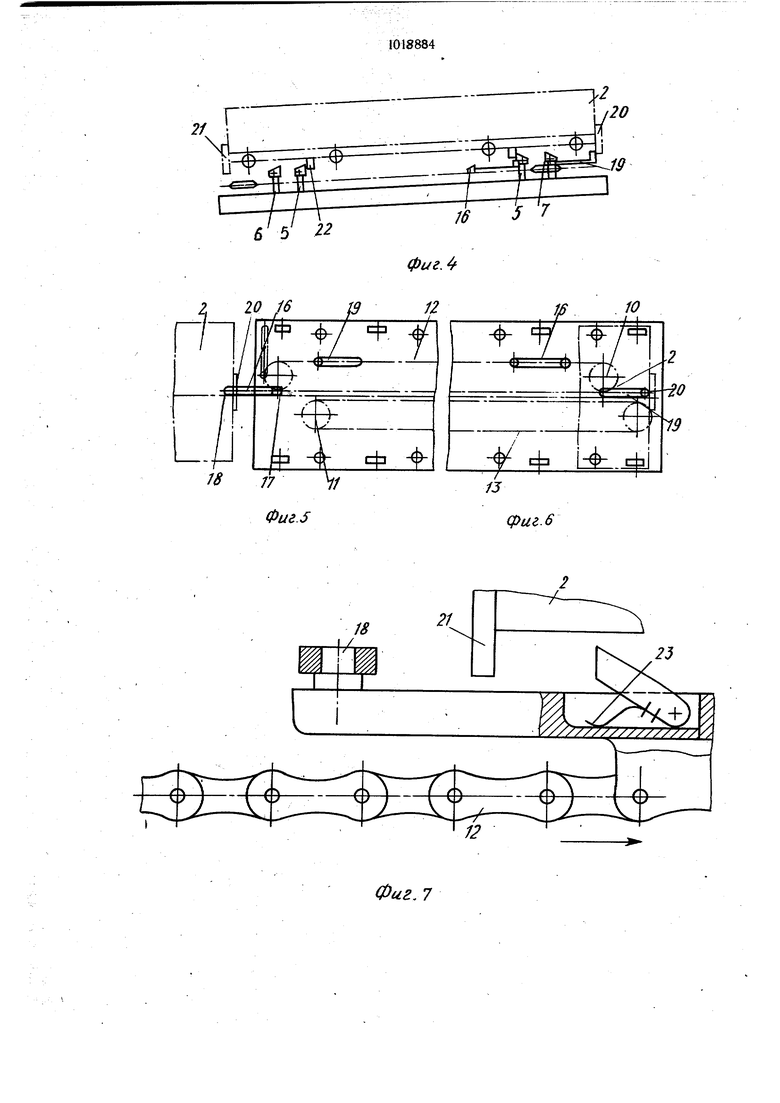
5 вид сверху; на фиг. 3 - грузоподъемная платформа, вид сверху (захват и толкатель занимают среднее исходное положение на платформе); на фиг. 4 - грузоподъемная платформа с установленным: на ней контейнером в исходном среднем положении; на
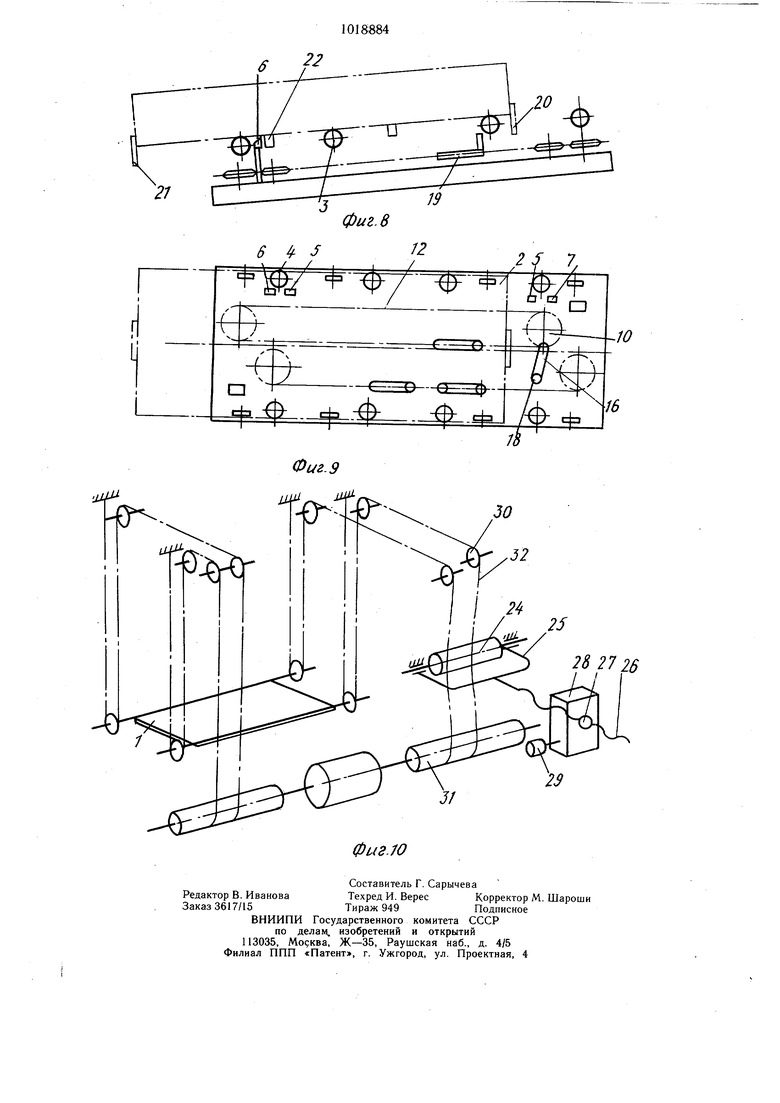
0 фиг. 5 - грузоподъемная платформа и контейнер, вид сверху (начало извлечения контейнера из стеллажа захватом); на фиг. 6 - то же (установка контейнера в среднее положение на платформе); на фиг. 7 - конструкция захвата; на фиг. 8 - грузоподъемная площадка и контейнер во время работы упора крайнего левого положения контейнера, вид сбоку; на фиг. 9 - то же, вид сверху; на фиг. 10 - схема крана-штабелера.
0лСклад содержит многоярусные стеллажи (не показаны), кран-штабелер с грузоподъемной платформой 1, (ходовая часть крана-штабелера и направляющие, на которые он установлен (условно не показаны)
5 и контейнеры 2, в которые помещены крупногабаритные тяжелые грузы.
На раме грузоподъемной платформы 1 установлены опорные ролики 3 и направляющие ролики 4, служащие для поддержания и транспортирования контейнеров 2. Для
0 фиксации контейнеров 2 в среднем положении, крайних левом и правом положениях, на раме платформы 1 смонтированы убираемые упоры 5-7, которые имеют скосы и смонтированы с возможностью перемещения вниз под действием контейнера, взаимодействующего со скосом и возвращаемые в исходное положение после окончания вза имодействия с контейнером. Приводами
для упоров 5-7 могут служить гидротолкатели (не показаны).
Грузоподъемная платформа 1 снабжена двумя механизмами для подачи контейнера в стеллаж, извлечения контейнера 2 из стеллажа и перемещения его по платформе Каждый механизм состоит из ведомых 8 и 9, ведущих 10 и П звездочек, тяговых цепей 12 для правого механизма и 13 для левого, и имеет приводы цепей 14 и 15 соответственно. На каждой тяговой цепи 12 или 13 закреплен захват 16 с упорной защелкой 17 и пальцем 18, а также толкатель 19, служащий для завода и сопровождения контейнера 2 в стеллаж.
Контейнер 2 снабжен выступами - упорными пластинами 20 и21, и дополнительными выступами - ножками 22, а защелка 17 снабжена пластинчатой пружиной 23 (фиг. 7).
В нерабочем положении тяговые цепи 12 и 13 должны находиться в исходных положениях, как показано на фиг. 3 (захват 16 и толкатель 19 должны быть расположены посередине грузовой платформы).
Для наклона платформы 1 (фиг. 1Q) грузоподъемной платформы установлен отклоняющий блок 24 с вилкой 25 и силовым винтом 26 с гайкой 27, которая закреплена на червячном колесе редуктора 28, кинематически связанного с электродвигателем 2. Отклоняющий блок 24 располагается между неподвижными блоками 30 и барабаном 31 и упирается в вертикальную ветвь каната 32.
Работа склада происходит следующим образом.
Грузоподъемной платформе 1, установленной в исходное положение против необходимого адреса стеллажа, придается уклон, соответствующий уклону контейнера 2, расположенного на стеллаже (фиг.2),.а убираемые упоры 5-7 выдвинуты.
Для извлечения контейнера 2 из стеллажа, расположенного, например, .слева от платформы (контейнер должен перемещаться слева направо) включается привод 14 (фиг. 3), который перемещает правую тяговую цепь 12 с захватом 16 и толкателем 19 (при перемещении контейнера справа налево включается привод 15).
Когда захват 16 расположится вдоль ведущей ветви тяговой цепи 12 (фиг. 2 и,5) при ее движении, то он, взаимодействуя с упорной пластиной 20 контейнера 2, извлекает его из стеллажа и перемещает по платформе. При этом упорная пластина 20 контейнера 2 располагается между пальцем 18 и упорной защелкой 17 захвата 16 (фиг. 6), что исключает произвольное скатывание контейнера 2.
При прохождении звена тяговой цепи 12, к которому прикреплен захват 16 через ведущую звездочку 10, палец захвата 16 выходит из соприкосновения с упорной пластиной 20 контейнера 2 (фиг. 7).
Для удержания контейнера на наклонной платформе на период, пока не подойдет к пластине 20 толкатель 19, предусмотрен упор 6, позволяющий беспрепятственно ,перемещаться контейнеру слева направо, но задерживающий его в крайнем левом положении, при перемещении контейнера 2 справа налево (аналогичное назначение упора 7 при другом наклоне платформы и при перемещении контейнера 2 справа налево, когда работает привод 15 и тяговая цепь 13). При подходе толкателя 19 тяговой цепи 12 к упорной пластине 20 контейнера 2 упор 7, удер-живающий контейнер 2 в крайнем правом положении под воздействием гидротолкателя (условно не показан) опускается, и контейнер 2 может беспрепятственно перемещаться.
Дальнейщее перемещение контейнера 2 происходит под воздействием толкателя 19 на упорную пластину 20 (фиг. 3 и 5) и продолжается до установки контейнера 2 на середину платформы, где он автоматически фиксируется упорами 5. Фиксация происходит за счет упирания ножек 22 контейнера 2 в упоры 5. Так как ведущая звездочка 10 находится на большем расстоянии от торца, чем ведомая 8, то захват 16, проходя через нее, не будет воздействовать на контейнер, расположенный в стеллаже справа от плат . формы.
При расположении контейнера 2 посередине платформы возможно перемещение платформы (вдоль стеллажа, подъем и опус канне).
Для выдачи контейнера 2 вправо гидротолкателем убирается упор 7 крайнего правого положения контейнера 2, препятствующий выдвижению контейнера 2 по инерции за пределы действия захвата 16 цепи 13, упор 5 среднего положения контейнера 2, и, если необходимо изменяется наклон платформы. После удаления контейнера 2 упоры 5 и 7 возвращаются в исходное положение.
При своем движении тяговая цепь 12, перемещаясь подводит захват 16 к упорной пластине 21 контейнера 2, при этом упорная защелка 17 при прохождении под упорной пластиной 21 контейнера 2 утапливается, а после прох ождения пружиной 23 возвращается в исходное положение, а палец 18 захвата 16 упирается в упорную пластину 21 контейнера 2. Таким образом, упорная пластина 21 находится между пальцем 18 и защелкой 17, что исключает произвольное перемещение контейнера по платформе при ее наклоне. При дальнейщем движении захват 16, упираясь в упорную пластину 21. расположенную с левой стороны контейнера 2, перемещает последний до выхода из зацепления. Окончательное удаление контейнера 2 с платформы производится толкателем 19.
Если выдача контейнера 2 производится, например, влево, то необходимо сначала тяговую цепь 12 поставить в исходное положение (фиг. 3). Для этого надо убрать упоры 5, фиксирующие положение контейнера 2 на платформе в среднем положении, затем включить привод 15 тяговой цепи 13, составляющие механизм перемещения контейнера 2 влево. Палец 18 захвата 16, упираясь в упорную пластину 20 контейнера 2 перемещает последний по платформе справа налево, при этом упорная пластина 20 располагается между пальцем 18 и защел кой 17.
Для изменения наклона рамы платформы f включается электродвигатель 29, который вращает гайку 27, при этом силовой винт вместе с вилкой 25 перемещается,
перемещая отклоняющий блок 24. Последний, воздействуя на вертикальные ветви каната 32, отклоняет их от вертикального положения, благодаря чему правая часть платформы поднимается или опускается, образуя необходимый уклон.
Использование предлагаемой конструкции склада позволяет увеличить его емкость за счет уменьшения вертикальных зазоров между контейнерами, упростить конструкцию стеллажа за счет наличия уклона в случае необходимости опорных роликов и исключения фиксирующих контейнера элементов.
В целом изобретение позволяет повысить удобство эксплуатации склада, обеспечивая при больщой емкости возможность установки контейнеров как в стеллажи с наклонными полками, так и в стеллажи с горизонталь ными полками.


| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана штабелера | 1985 |
|
SU1315367A1 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Склад для хранения длинномеров | 1989 |
|
SU1698149A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| Склад для хранения штучных грузов | 1989 |
|
SU1729958A1 |
| Склад для хранения тонколистовых изделий | 1973 |
|
SU578222A1 |
| Кран-штабелер для обслуживания многоярусных стеллажей | 1979 |
|
SU867871A1 |
| Механизированный склад | 1989 |
|
SU1689231A1 |
СКЛАД ДЛЯ ХРАНЕНИЯ КРУПНОГАБАРИТНЫХ ГРУЗОВ, содержащий многоярусные стеллажи, установленные на полки стеллажей контейнеры для грузов, имеющие с противоположных сторон в нижней части выступы, и кран-штабелер, на колонне которого смонтирована грузоподъемная платформа, снабженная двумя расположенными параллельно один другому в горизонтальной плоскости приводными цепными контурами, к каждому из которых прикреплены захват и толкатель, взаимодействующие с контейнером, отличающийся тем, что, с целью повышения удобства эксплуатации, платформа смонтирована на колонне с возможностью поворота в вертикальной плоскости, при этом захват снабжен защелкой для взаимодействия с упомянутыми выступами контейнера, который имеет дополнительные выступы, а на платформе установлены пары подвижных от привода упоров для взаимодействия каждой из них с соответствующим дополнительным выступом. 00 ОС 00 4
/7 16 18 19 12 Ф ф . ф/ I11 3 19
фиг..5 II . I -ф/ Ф/ -ф //I1 ds -фФcjj
Фиг.6
Фиг, 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грузоподъемная площадка крана-штабелера | 1977 |
|
SU647206A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4010855, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
