00
со
00
:о
Изобретение относится к обработке металлов давлением и может быть использовано в автоматах для холодной и горячей объемной штамповки. 5
Целью изобретения является улучшение удобства обслуживания и повьше- ние надежности крепления матриц.
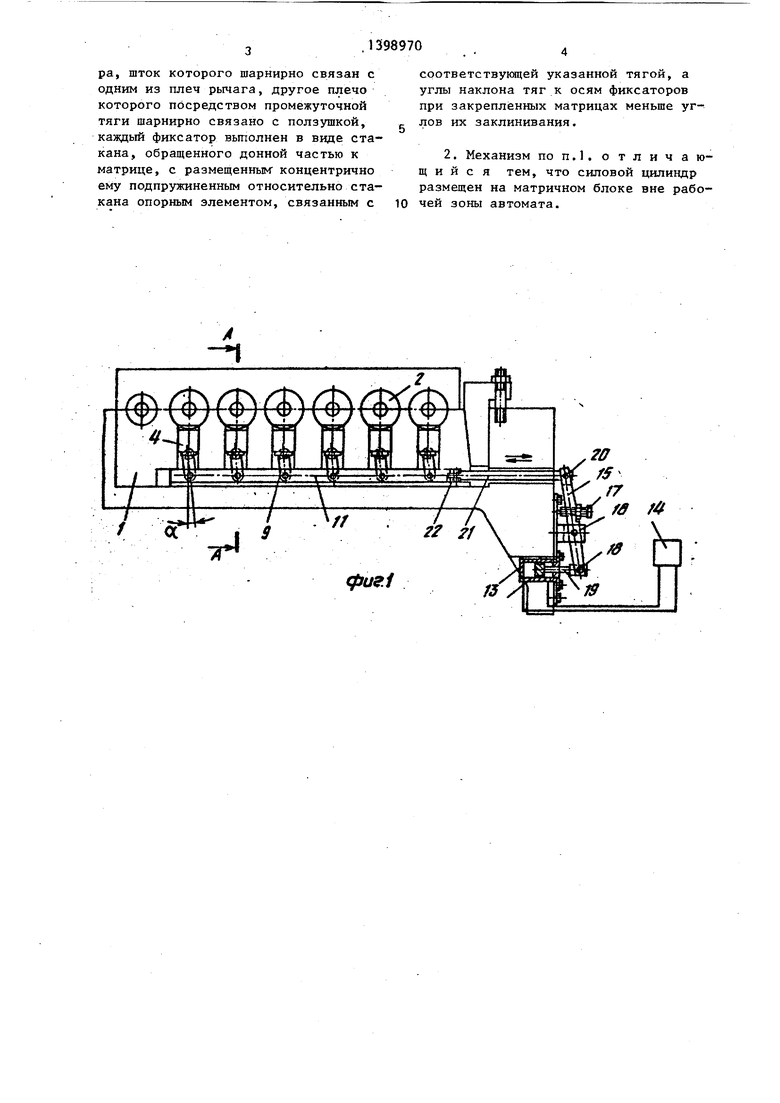
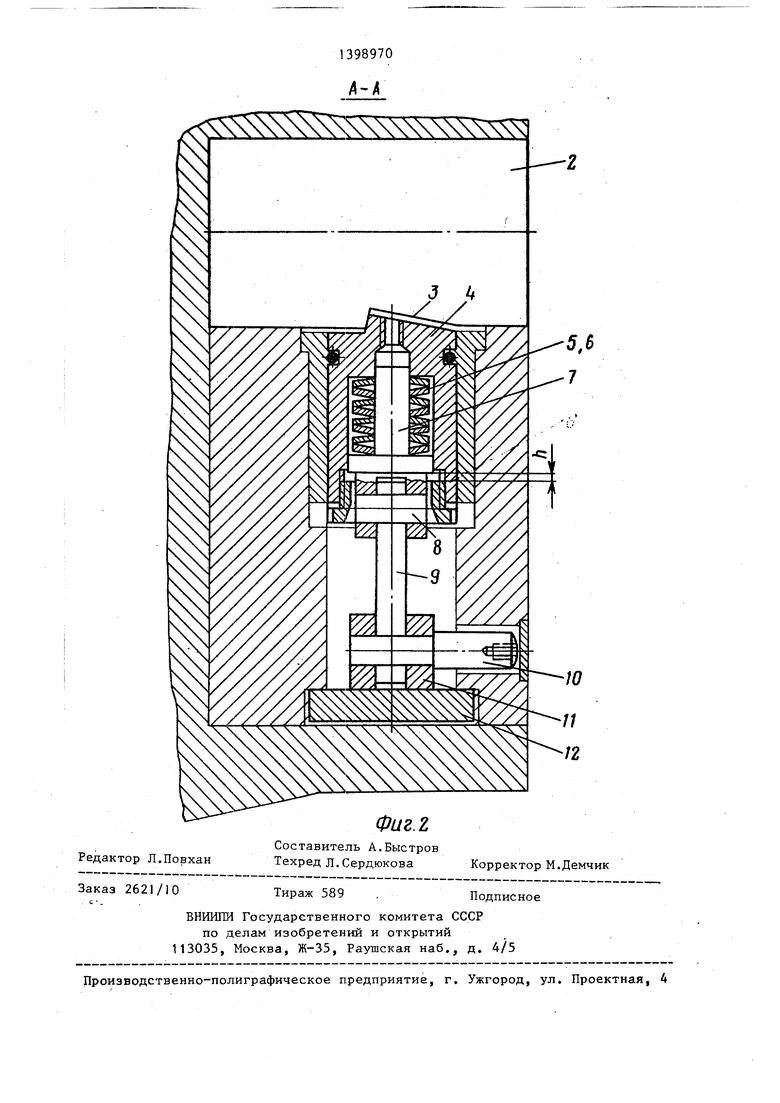
На фиг.1 изображен механизм крепления матриц, общий вид; на фиг.2 - 10 разрез А-А на фиг.1.
Механизм крепления матриц содержит матричньш блок 1 с размещенными в нем матрицами 2, имеющими фиксирующие гнезда 3, фиксаторы 4 матриц с 5 поверхностью торцов, ответной поверхности фиксирующих гнезд 3. В ф:ик- , саторах матриц размещены предварительно сжатые тарельчатые пружины 5, 6. Внутри отверстий тарельчатых пру- 0 жин.каждого фиксатора 4 расположен востовик опоры 7, которая посредст- / ом оси 8 связана с тягой 9, которая, свою очередь, через ось 10 соединеа с ползушкой 11, размещенной в па- 25 зу матричного блока 1 и опирающейся , нижней плоскостью на крьппку 12, закрепленную в матричном блоке 1. Вне рабочей зоны автомата размещен силовой цилиндр 13 с гидроприводом 14, 30 рычаг 15, качающийся на оси 16, с установленным в нем ограничительньп винтом 17. Рычаг 15 взаимодействует одним концом через ось 18 со штоком 19 силового цилиндра 13, а другим концом через ось 20 - с промежуточной тягой 21, ко.торая, в свою очередь, через ось 22 взаимодействует с ползушкой 11.
Механизм крепления матриц работа- 40 ет следу1ощим образом.
При подаче рабочей жидкости от гидропривода 14 в поршневую полость цилиндра 13 происходит перемещение штока 19, который взаимодействует через ось 18 с рычагом 15, заставляя последний повернуться вокруг оси 16. Через ось 20 движение совершает промежуточная тяга 21, а через ось 22 - ползушка 11. Связанные с ползушкой тяги 9 заставляют перемещаться фиксаторы 4 матриц вверх до сприкоснове- ния выступов фиксаторов матриц с гнездами 3 матриц 2, за счет взаимодействия которых происходит фиксирование матриц в нужном положении. Величина хода фиксаторов 4 матриц устанавливается больше той величины,
которая необходима для полного фиксирования матриц. Поэтому в конце хода когда произойдет фиксирование матриц дальнейшее перемещение фиксаторов прекращается, а движение рычага 15, промежуточной тяги 21, ползушки 11 и тяг 9 продолжается, осуществляя перемещение опор 7 и дополнительное сжатие тарельчатых пружин 5 на величину h, которая имеет разные значения в зависимости от допущенных отклонений размеров гнезд 3 матриц 2 и выступов фиксаторов 4. С помощью ограничительного винта 17 устанавливается величина хода ползушки 11, соответствующая минимальному значению величины Ь сжатия тарельчатых пружин 5-по одному из фиксаторов, при этом тяги 9 расположены под углами об к осям фиксаторов 4 матриц меньшими, чем углы заклинивания тяг, что .предотвращает расклинивание матриц при уменьшении давления жидкости в силовом цилиндре I3.
При освобождении матриц 2 из блока 1 рабочую жидкость подают в што- ковую полость цилиндра 13. Происходит противоположное описанному перемещение ползушки 11 и вывод фиксаторов 4 из гнезд 3 матриц 2 посредством тяг 9, причем в первый момент осуществляется выбор зазоров h.
Формула изобретения
1. Механизм крепления матриц автомата для объемной штамповки, включающий размещенные в блоке матрицы с фиксирующими гнездами, установленные в матричном блоке с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном осям матриц фиксаторы .: с торцовыми поверхностями, ответными поверхностям фиксирующих гнезд матриц, и привод перемещения фиксаторов, отличающийся тем, что, с целью улучшения удобства обслз ивания и повьш1е- ния надежности, привод перемещения фиксаторов выполнен в виде размещенных в матричном блоке фиксаторов с .возможностью возвратно-поступательного перемещения в осевой плоскости в направлении, перпендикулярном их осям, ползушки, шарнирно связанных с ней и с фиксаторами тяг, установленного на матричном блоке с возможностью качания рычага, силового цилиндpa, шток которого шарнирно связан с одним из плеч рычага, другое плечо которого посредством промежуточной тяги шарнирно связано с ползушкой, каждый фиксатор вьтолнен в виде стакана, обращенного донной частью к матрице, с размещенным концентрично ему подпружиненным относительно стакана опорным элементом, связанным с
соответствукяцей указанной тягой, а углы наклона тяг к осям фиксаторов при закрепл1енных матрицах меньше углов их заклинивания,
2. Механизм по п.1. о т л и ч а ю- щ и и с я тем, что силовой циливдр размещен на матричном блоке вне рабо- чей зоны автомата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ листовой штамповки и устройство для его осуществления | 1989 |
|
SU1712031A1 |
| Матричный блок высадочного автомата | 1987 |
|
SU1407644A1 |
| Узел крепления штамповочного инструмента | 1990 |
|
SU1803338A1 |
| ХОЛОДНОВЫСЛДОЧНЫЙ ДВУХУДАРНЫЙ АВТОМАТ | 1972 |
|
SU352702A1 |
| Автомат для холодной штамповки роликов | 1979 |
|
SU940990A1 |
| Штамп для резки профилей | 1986 |
|
SU1333481A2 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ЗАГОТОВОК ПО РУЧЬЯМ ШТАМПА С ВЕРТИКАЛЬНЫМ РАЗЪЕМОМ МАТРИЦ | 2012 |
|
RU2496597C1 |
| Штамп для изготовления изделий с лезвиями типа рабочих органов сельскохозяйственных машин | 1983 |
|
SU1123783A1 |
| Устройство для закрытой объемной штамповки | 1982 |
|
SU1044403A1 |
Изобретение относится к обработке металлов давлением и может быть использовано в автоматике для холодной и горячей объемной штамповки. Цель - улучшение удобства обслуживания и повьш1ение надежности крепления матриц. В матричном блоке матрицы с фиксирующими гнездами крепятся с помощью фиксаторов, ш еющих выступы на торцах, взаимодействующие с гнездами. Все фиксаторы, перемещающиеся перпендикулярно продольным осям матриц, имеют общий привод их перемещения. Он включает ползушку, приводимую в движение от силового цилиндра, связанного с качающимся рычагом с пол- зущкой. Фиксаторы в виде стаканов, обращенных донными частями к матрицам, через промежуточные подпружиненные опоры и связанные с ними тяги шарнирно соединены с ползущкой. Оси тяг расположены под углом к осям фиксаторов, который при закрепленных матрицах меньше угла заклинивания тяг. Благодаря этому при случайном отключении подачи энергоносителя к цилиндру матрицы остаются закрепленными в гнездах матричного блока. 1 з.п. ф-лы. 2 ил. (Л
rJ
Фиг.г
| Заявка ФРГ № 3049495, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
