20
Oi
4
фиг
Изобретение относится к обработке металлов давлением, в частности к матричным блокам к автоматам для объемной штамповки.
Цель изобретения - сокращение времени на смену инструмента и повы: шение надежности его крепления.
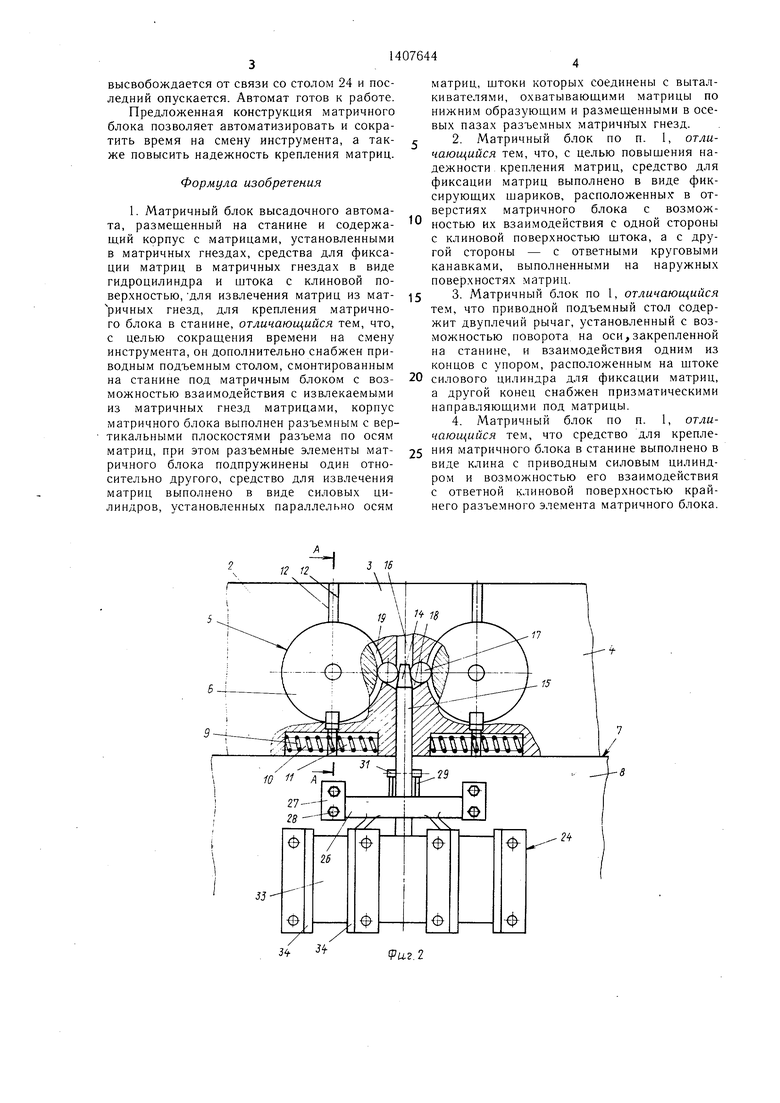
I На фиг. 1 показан матричный блок
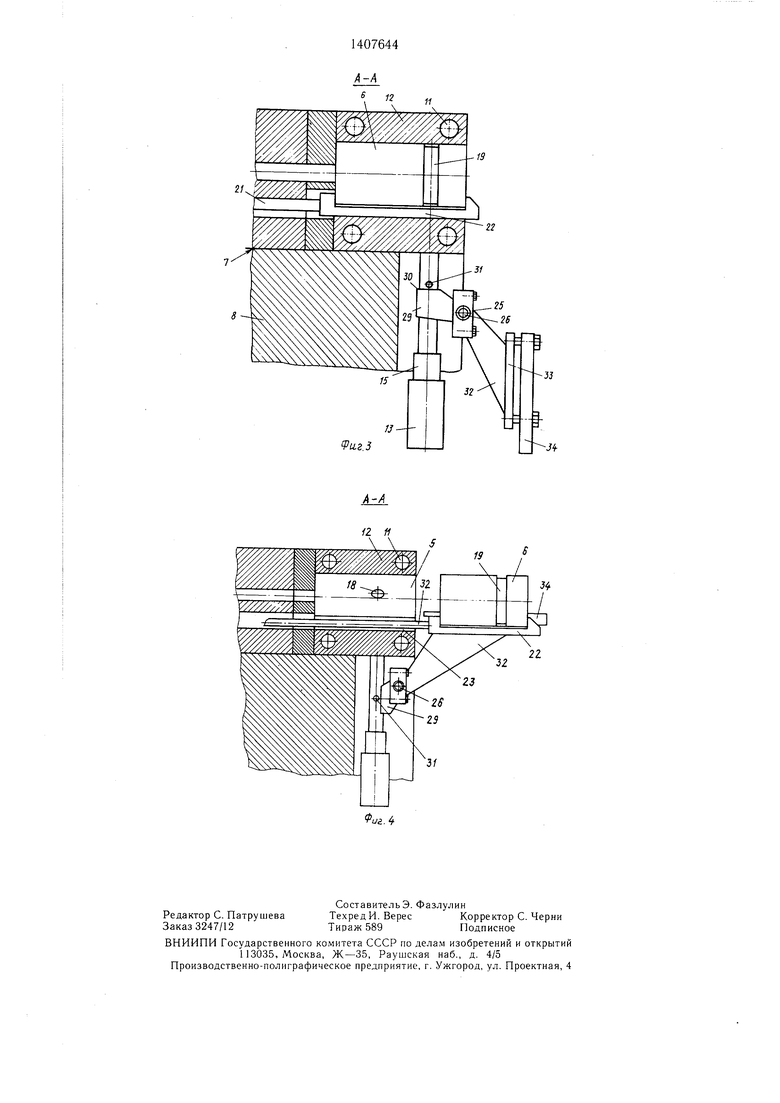
I высадочного автомата, общий вид; на фиг. 2 то же, вид спереди; на фиг. 3 - разМатричный блок автомата снабжен клином 35, соединенным через шток 36 с силовым цилиндром 37 зажима матричного блока и взаимодействующим с клиновой поверхностью 38 правого крайнего разъемного элемента 4 матричного блока.
Работа матричного блока при смене инструмента осуществляется автоматически от пульта управления (не показан).
При извлечении матриц шток 15 с клии по отверстиям 18 спускаются в вертикальный паз 16, осуществляя освобождерез А-А на фиг. 2, в опущенном поло- 10 новой поверхностью 14 силового цилиндра жении приводного подъемного стола; на13 перемещается вниз. Шарики 17 выходят
фиг. 4 - то же, в поднятом положе-из круговых кольцевых канавок 19 матриц
НИИ приводного подъемного стола.
Матричный блок 1 высадочного автомата содержит разъемный корпус, выполнен-ние матриц 6 от фиксации в матричный из отдельных разъемных элементов сных гнездах 5. Одновременно упор 31 на вертикальными плоскостями разъемов: лево-штоке 15, перемещаясь вниз, взаимодейст- го 2, центрального 3 и правого 4 свует с плоскостью 30 конца 29 двупле- разъемными матричными гнездами 5, в кото- чего рычага 25 поворотного стола 14. I рых установлены матрицы 6. Матричный Двуплечий рычаг 25 поворачивается на оси блок установлен на направляющих 7 ста- 20 26 и поднимает стол с призматическими НИНЫ 8 автомата. Отдельные разъемные направляющими 34. элементы 2, 3 и 4 подпружинены между собой с возможностью перемещения по направляющим 7 за счет пружин 9 сжатия, установленных в отверстиях 10 и 11, выполненных на торцовых поверхностях 12 двух смежных разъемных элементов.
Средство для фиксации матриц в матричных гнездах содержит силовой цилиндр 13, смонтированный под матричным блоком 1
автомата, клиновая поверхность 14 штока 15 .,. выталкиватели 22, охватывающие матрицы 6. которого размещена в отверстии 16 матрич-Матрицы 6, перемещаясь, устанавливаются
ного блока с возможностью взаимодействия через фиксирующие шарики 17 с матрицами 6. Фиксирующие шарики 17 расположены в отверстиях 18, выполненных в разъемных матричных гнездах 5. На наруж- с ричные гнезда 5 их укладывают на призма- ных поверхностях матриц 6 выполненытические направляющие 34. Штоки 21 пе25
После этого шток 36 силового цилиндра 37 отводит клин 35, который освобождает крайний разъемный элемент 4. Под воздействием пружин сжатия 9 отдельные разъемные элементы 2-4 блока расходятся, перемещаясь по направляющим 7 станины 8 автомата, освобождая матрицы 6.
Далее приводятся в действие щтоки 21 силовых цилиндров 20, которые выдвигают
на призматические направляющие 34 стола 24 в положение, удобное для их даль- нейщего удаления.
При установке новых матриц 6 в маткруговые канавки 19 для размещения в них шариков 17 при фиксации матриц 6 в матричных гнездах 5.
Средство для извлечения матриц и матричных гнезд содержит силовые цилиндры 40 20, установленные параллельно осям матриц, щтоки 21 которых соединены с выталкивателями 22, охватывающими матрицы 6 по нижним образующим. Выталкиватели 22
ремещаются в полости силовых цилиндров 20 тянут за собой выталкиватели 22 с размещенными в них матрицами 6 в разъемные матричные гнезда 5.
щаться по направляющим 7 станины 8 автомата. Пружины 9, расположенные в отверстиях 10 и 11, между разъемными эле- .ментами 2 и 3, 3 и 4 сжимаются, заНачинает работать силовой цилиндр 37. Его шток 36 перемещается внутрь цилиндра и тянет за собой клин 35. Последний скользит по клиновой поверхности 38 размещены в осевых пазах 23 разъемныхправого крайнего разъемного элемента 4
матричных гнезд смежных элементов матрич-матричного блока, заставляя его переменого блока 1. Приводной подъемный стол 24 смонтирован на станине 8 под .матричным блоком и содержит двуплечий рычаг 25, установленный с возможностью
поворота на оси 26, закрепленной на ста- о зор выбирается и матричный блок 1 фик- нине с помощью прижимных планок 27сируется на станине 8 автомата,
и болтов 28. Один из концов 29 дву-Далее вступает в действие силовой
плечего рычага 25 плоскостью 30 кон-цилиндр 13. LUTOK 15 выдвигается, клинотактирует с упором 31, расположеннымвая поверхность 14 находит на шарики 17,
на ujTOKe 15 силового цилиндра 13, азаставляя их взаимодействовать с круговына другом его конце 32 смонтирована пли- 55 ми канавками 19 матриц 6, фиксируя поста 33 с призматическими направляющимиледние в матричных гнездах 5. Одновре- 34 для приема извлекаемых из матричныхменно упор 31 штока 15, скользя по плос- гнезд 5 матриц G. кости 30 конца 29 двуплечего рычага 25,
Матричный блок автомата снабжен клином 35, соединенным через шток 36 с силовым цилиндром 37 зажима матричного блока и взаимодействующим с клиновой поверхностью 38 правого крайнего разъемного элемента 4 матричного блока.
Работа матричного блока при смене инструмента осуществляется автоматически от пульта управления (не показан).
При извлечении матриц шток 15 с кли новой поверхностью 14 силового цилиндра 13 перемещается вниз. Шарики 17 выходят
и по отверстиям 18 спускаются в вертикальный паз 16, осуществляя освобождеиз круговых кольцевых канавок 19 матриц
ние матриц 6 от фиксации в матричных гнездах 5. Одновременно упор 31 на штоке 15, перемещаясь вниз, взаимодейст- вует с плоскостью 30 конца 29 двупле- чего рычага 25 поворотного стола 14. Двуплечий рычаг 25 поворачивается на оси 26 и поднимает стол с призматическими направляющими 34.
ние матриц 6 от фиксации в матричных гнездах 5. Одновременно упор 31 на штоке 15, перемещаясь вниз, взаимодейст- вует с плоскостью 30 конца 29 двупле- чего рычага 25 поворотного стола 14. Двуплечий рычаг 25 поворачивается на оси 26 и поднимает стол с призматическими направляющими 34.
выталкиватели 22, охватывающие матрицы 6. Матрицы 6, перемещаясь, устанавливаются
После этого шток 36 силового цилиндра 37 отводит клин 35, который освобождает крайний разъемный элемент 4. Под воздействием пружин сжатия 9 отдельные разъемные элементы 2-4 блока расходятся, перемещаясь по направляющим 7 станины 8 автомата, освобождая матрицы 6.
Далее приводятся в действие щтоки 21 силовых цилиндров 20, которые выдвигают
выталкиватели 22, охватывающие матрицы 6. Матрицы 6, перемещаясь, устанавливаются
ричные гнезда 5 их укладывают на призма- тические направляющие 34. Штоки 21 пена призматические направляющие 34 стола 24 в положение, удобное для их даль- нейщего удаления.
При установке новых матриц 6 в матремещаются в полости силовых цилиндров 20 тянут за собой выталкиватели 22 с размещенными в них матрицами 6 в разъемные матричные гнезда 5.
щаться по направляющим 7 станины 8 автомата. Пружины 9, расположенные в отверстиях 10 и 11, между разъемными эле- .ментами 2 и 3, 3 и 4 сжимаются, заматричного блока, заставляя его перемевысвобождается от связи со столом 24 и последний опускается. Автомат готов к работе. Предложенная конструкция матричного блока позволяет автоматизировать и сократить время на смену инструмента, а также повысить надежность крепления матриц.
Формула изобретения
. Матричный блок высадочного автомата, размещенный на станине и содержащий корпус с матрицами, установленными в матричных гнездах, средства для фиксации матриц в матричных гнездах в виде гидроцилиндра и штока с клиновой поверхностью, ДЛЯ извлечения матриц из мат- ричных гнезд, для крепления матричного блока в станине, отличающийся тем, что, с целью сокращения времени на смену инструмента, он дополнительно снабжен приводным подъемным столом, смонтированным на станине под матричным блоком с возможностью взаимодействия с извлекаемыми из матричных гнезд матрицами, корпус матричного блока выполнен разъемным с вертикальными плоскостями разъема по осям матриц, при этом разъемные элементы матричного блока подпружинены один относительно другого, средство для извлечения матриц выполнено в виде силовых цилиндров, установленных параллельно осям
5
0
5
матриц, щтоки которых соединены с выталкивателями, охватывающими матрицы по нижним образующим и размещенными в осевых пазах разъемных матричнЪ1х гнезд.
2.Матричный блок по п. I, отли- чающийся тем, что, с целью повыщения надежности крепления матриц, средство для фиксации матриц выполнено в виде фиксирующих щариков, расположенных- в отверстиях матричного блока с возможностью их взаимодействия с одной стороны с клиновой поверхностью щтока, а с другой стороны - с ответными круговыми канавками, выполненными на наружных поверхностях матриц.
3.Матричный блок по 1, отличающийся тем, что приводной подъемный стол содержит двуплечий рычаг, установленный с возможностью поворота на оси,закрепленной на станине, и взаимодействия одним из концов с упором, расположенным на штоке силового цилиндра для фиксации матриц, а другой конец снабжен призматическими направляющими под матрицы.
4.Матричный блок по п. 1, отличающийся тем, что средство для крепления матричного блока в станине выполнено в виде клина с приводным силовым цилиндром и возможностью его взаимодействия с ответной клиновой поверхностью крайнего разъемного элемента матричного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Автомат для изготовления деталей стержневого типа с головками | 1976 |
|
SU659274A1 |
| Способ гидропрессования длинномерных профильных изделий и установка для его осуществления | 1986 |
|
SU1454536A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СИЛЬФОНОВ | 1990 |
|
RU2019339C1 |
| ПРЕСС КРИВОШИПНЫЙ | 1998 |
|
RU2146197C1 |
| Многопозиционный станок | 1984 |
|
SU1220735A1 |
| Станок для гибки монтажных петель и анкеров | 1982 |
|
SU1096017A1 |
| Загрузочное устройство | 1984 |
|
SU1202794A1 |
| Роторно-конвейерная машина | 1980 |
|
SU940993A1 |
| УСТРОЙСТВО ДЛЯ ДЕФОРМИРОВАНИЯ КОНЦОВ ТРУБ | 1991 |
|
RU2008118C1 |
Изобретение относится к обработке металлов давлением и может быть использовано при смене инструмента в автоматах для объемной штамповки. Цель - сокращение времени на смену инструмента и повышение надежности его крепления. Матричный блок 1 содержит разъемный корпус из отдельных элементов, подпружиненных один относительно другого, приводной подъемный стол, средства для фиксации матриц в матричных гнездах, для извлечения матриц, для крепления матричного блока в станине. При извлечении матриц шток 15 с клиновой поверхностью силового цилиндра 13 опускается, осуществляя освобождение матриц 6 от фиксации их в матричных гнездах 5. Одновременно упор, установленный на штоке 15, взаимодействует с двуплечим рычагом подъемного стола, поднимая его для приема матриц. Шток 36 силового цилиндра 37 отводит клин 35. Разъемные подпружиненные элементы расходятся, освобождая матрицы 6. Далее штоки 21 силовых цилиндров 20 выдвигают выталкиватели 22, охватывающие по нижним образующим матрицы 6, и устанавливают матрицы на направляющих подъемного стола. Матрицы удаляют, на их место устанавливаются другие. Установка осуществляется в обратном порядке. 3 з.п. ф-лы, 4 ил. С (Л
PU2.2
2
Уаг.З
13
| ПатентФРГ№3049495, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
