2.Манипулятор по п.1, о т л и ч а ю щи И с я тем, что муфта выполнена втулочно-пальцевой, а пружины , подпружинивашще подвижную часть шпинделя, смонтированы на пальцах муфты.
3.Манипулятор по п.1, о т ли-, ч а ю и и и с я тем чю, с целью
исключения ударных нагрузок на при-, вод вращения шпинделя при ковке без вредцения заготовки, он снабжен смонтированным в корпусе с возможностью радкал. перемещения фиксатороМ и диском с гнездами под .фиксатор, жестко установленным на шпинделе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАЖИМНАЯ ГОЛОВКА-МАНИПУЛЯТОР | 2005 |
|
RU2295436C2 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Клещевая головка ковочного манипулятора | 1982 |
|
SU1055583A1 |
| Зажимная головка манипулятора | 1977 |
|
SU839137A1 |
| Ручной кантователь | 1982 |
|
SU1026921A1 |
| Ковочный манипулятор | 1974 |
|
SU542582A1 |
| Ковочный комплекс | 1987 |
|
SU1532305A1 |
| Манипулятор для переноса заготовок | 1982 |
|
SU1074651A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| Ковочный комплекс | 1991 |
|
SU1787639A1 |
1; МаНИДУЛЯТОР к ковочньйУ мацр1нам, содержащий корпус, установ. ленный в нем шпиндель,, связанный с приводом вращения, размещенный на {шинделе клетевойзахват в виде двуплечих рычагов и мехайизм зажима W г клещевого захвата, ныполнек-ч. ныйв виде связанной со,штокой-сило-; вого цилиндра подвижной вдоль оси шпинделя втулки с наклонными поверхностями, взаимодействующие с {илчагами захвата, отличающий с я тем, что, с целью повьшения надежности при обработке заготовок редуцированием. Шпиндель выполнен сое- тавным из двух частей, связанных между собой муфтой, при этом часть шпинделя, на которой смонтирован клещевой з.ах&ат, установлена с возможностьв осевого перо«е1Ф ния и подпружинена в противположные стороны .относительно другой «гаети, а. с наклонными поверхностями также под пружинена в пix тивoпcшpжiшe стороны (Л относительно штока силового щшинЯра. № IS fe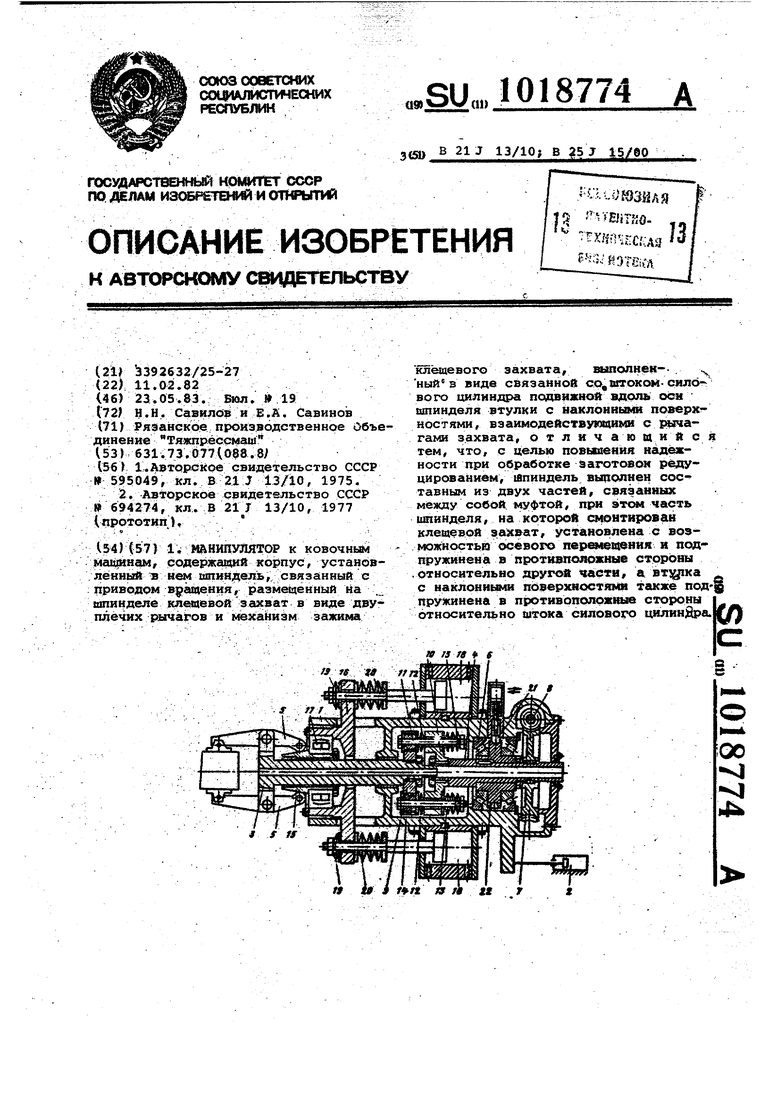
Изобретение относится к вспомогательному оборудованию кузнечноиреееовцх цехов, а именно к манипуляторам, работающим в коьщлекхзе с ковочнымд машинами. . . . Известен манипулятор к ковочным машинам, содержащий.шпиндель, связанный с приводом вращения, и клеще ВОЙ :захват, установленный на шпинделе- til- : . - .: Недостатком известного манипуля тора является невысокая надежность работы невозможности гашения динамических нагрузок при ковке, Наиболее близким решением по тех нической сущности и достигаемому результату является манипулятор к к вочным машинам, содержащий корпус, установленный в нем шпиндель, связанный с приводом вращения, размеще ный на-шпинделе клещевой захват в виде двуплечих рычагов, и механизм зажима клещевого захвата, выполненный в виде связанной со штоком сило вого цилиндра подвижной вдоль оси шпинделя втулки с наклонными поверх ностями, взаиг.толр ствуюиими с ры агами захвата 23. Недостаток известного манипулятора заключается в том, что он не обеспечивает .высоко эффективности ковочной машины при редуцировании заготовки, так как препятствует сво бодному течению деформируемого металла в сторону манипулятора от мес та обжима заготовки бойками машины При редуцировании длинномерной заготовки происходит уменьшение ее поперечного сечения за счет увеличе ни длины. В момент обжатия заготов ки вытесненный бойками металл течет в противоположные стороны от места обжатия вдоль заготовки. В сторону свободного конца заготовки течению металла ничто не мешает, этот конец свободно удлиняется. В сторону же конца, зажатого в захвате манипулятора, заготовка не может удлиняться так как шпиндель, несущий захват, зафиксирован.в корпусе от осевого смещения и этим препятствует удлин нию заготовки. В результате этого резко увеличиваются ударные нагрузки на мехаи ипулятора и, кроме того, вытесненный в направлении захвата :Металл заготовки вынужденно растекаётся в радиальном направлении, увеличивая.поперечное сечение последней и, тем самым, снижая эффективность редуцирэвания. , . Цель изобретения - повышение надежности - работы манипулятора при обработке заготовок редуциррвания . : Поставленная цель достигается тем, что в манипуля.торе к ковочным меииинам, содержащем корпус, устанойленйый в .Нём шпиндель, связанный с приводом вращения, размещенный на шпинделе :клещевой захват в виде двунлечих раячагов, и механизм зажима клещевого захвата, выполненный в связанной со штоком силового цилиядра.ПОДВИЖНОЙ вдоль оси шпинделя, 12ту/{ки с наклонными поверхностями, взаимодействующими с рычагами захвата; шпиндель выполнен составным из двух частей, связанных между собой муфтой, при этом часть шпинделя на которой смонтирован клещевой захват, установлена с возможностью осевого перемещения и подпружинена в противоположные, стороны относительно другой части.; а .втулка с наклонными поверхностями также подпружинена в против.оположные стороны относительно штока силового цилиндра. В манипуляторе муфта может быть выполнена втулочнопальцевой, а пружины, подпружинивающие подвижную часть шпинделя, могут быть смонтированы на пальцах муфты. Кроме того, с целью исключения ударных нагрузок на привод вращения шпинделя при ковке без вращения заготовки, манипулятор может быть снабжен смонтированным в корпусе с возможностью радиального перемещения фиксатором, а диском с гнездами под фиксатор, жестко установленными на шпинделе. Иа чертеже изображен манипулятор, общий вид в разрезе. Корпус 1 манипулятора установлен на направляющих радиально-ковочной машины (не показаны ) и под действием смонтиррэанногр на ней гидроцилиндра 2 возможность перемещения оси ковки для протягивания рбрабатйваемрй, заготовки через зону ковки ма шины. В корпусе 1 смонтирован шпиндель манчпул 1:тора/ вютолненный cobтавным из двух частейг подвижной час ти 3 и непод:1вчжнрй в осевом напрайлении части 4; На:переднем конце под вижной части 3 дайнД(рля смонтирован клёи(евой захйа виде шарнирир уста нрвленных дйут1Лё«1з х з.ажимных Еялчагрв 5 1с губками ДяМ ажимз заготовки. Часть 4 шпинделя двулет упоряьида подшипниками б зафиксйроаая от рсеврго смевд нкя ртирсительно ,ко| пуса 1 и. связана с ПР вбдом враадения, представленным жестко закрепле йым на шпинделе червячншх колесом 7 и приврдным :червяком 8, который при эадаьиении загртовки бойками машины , имеет врзмржнос ьосеврго перемещения бтйоеяТельнр кОПбза 7. Части 3 и 4 шйийдхёля связаны межд собой втулрчнргпалЬцевой мУФтой, ве,; Йрмая йо 1умуфта 9 котрррй жесТкр закрейлена на псшвижнРй частл 3, а ве, дущая иолуМуфТа 10 - на 4aicTH 4 шнип ;-деля.;л.,л :..,/.::- 1--.-;-/. рдвижйая части 3 подпру жинена вдрльЬси в противрноложных направлениях. Для этрго паль 1 11 муфты вйрлненыудаинё« гьми и на каждРй из по Два набора тарельчатых пружин: набор 12 установяеи полугиуфтами 9 и 10, а йабор 13 - :ср стороны внешнего. торца прлуло фты 10, Пальцы 11 установлены в полумуфте 9 в амортизнрующих втулках 14 из упругого материала, например реЙ1ны. . Могут быть и другие исполнения муфты и установки пружин. Важно глав ное - обе части шпинделя должны быть связаны между собой с возможностью передачи крутящего момента и садновременно с возможностью осевого смещения части 3 относительно части 4 шпинделя и кроме того, подвижная час хь 3 должна быть подпружинена. Для зажима клещей манипулятор имеет приводной механизм/ представляювдий собой втулку 15, смонтированную в подвижном относительно корпуса 1 фланца 16 посредством подшипниково го узла 17, Втулка 15 имеет наклонные поверхности, котррые взаимрдействуют с рычагано 5 клещевого захвата. Фланец 16 связан со штоками приврдных гидро цилиндров 18, посредством наборов 19 и 20 тарельчатых пружин, смонтиро ванных на каждом штоке с обоих торцов фланца 16, Пруяа1нные наборы 19 и 20, а также 12 и13 смонтированы в предварительно сжатом состоянии. Суммарная характеристика упругих деформаций всех пружинных наборов 13 соответствует такой же характеристике 20, а аналогичная харгжтеристика наборов 12 сортветствует характеристике наборов 19, Пружины 12 и.19 служат для смягчекия УДаров при отдаче и снятии давления в цилиндрах 18. На трт случай, кргда возникает необходимрсть в ковке заготовки без ее вращения, в манипуляторе предусмотрен радигшьно подвижный фиксатрР 21 с пневмоприводомг а на шпинделе жестко закреплён диск 22 с углублениями для этого фиксатора (гнездами;. Работает манипулятор следукяцим образом. Для зажима загртрвки в клещевом, захвате подается давление в прршнейые полости цилинд1х в 18, Штоки последних, сжимая пружины 20, перемещают влево по чертежу фланец 16 вместе с установленной в нем втулкой 15, При этРм наклонные поверхности втулки 15 перемещаются относительно рычагов 5, заставляя их поворачиваться на шарнирах, в результате чего заготовка оказывается зажатой губками клещей. Хотя при зажиме загртовки наклонные поверхности втулки 15 стремятся , вытянуть подпружиненную часть 3 шпинделя (за счет горизонтальной составляющей взаимодействия наклрнных поверхностей с рычагами ), однакр это наблквдается только в начале зажима, пока противодействие сжимающихся при этом пружин 13 не компенсирует вытягивающую силу. Подается давление в гндроцилиндр 2 и перемещением всего манипулятора с постоянной скоростью заготовка подается в зону ковки ргшиально-ковочной (обжимнрй ) машины. Происходит последовательное, по мере продвижения, редуцирование (уменьшение поперечного сеченияj холодной или нагретой до температуры ковки заготовки бойками машины, работающими с частотой 200-1500 ударов в минуту. Если обрабатывается круглая заготовка, то фиксатор 21 выведен из контакта с диском 22 и вращением приводного червяка 8 часть 4 шпинде ля приводится во вращение. Это вращение через ведущую полумуфту 10, пальцы 11, втулки 14 и ведомую муфту 9 передается на другую часть 3 шпинделя и далее через клещевой захват на обрабатываемую заготовку, В процессе редуцирования загртрвки металл, деформируемый бойками машины при каждом ударе последних, растекается в обе стороны отместа обжатия, удлиняя оба конца заготовки приблизительнр на 1-3 мм ( для машин средней мощности) при к аждом ударе бойков. Удлинение в сторону клещевого захвата передается на
подвижную часть 3 шпинделя, который в результате этого смещается вправо по чертежу, сжимая пружины наборов 12 и 20 и одновременно обеспечивая разжим пружинных наборов 13 и 19. При 9tGM рычаги 5 клещей, упиргшсь во втулку 15, заставляют сместиться вправо и ее вместе с фланцем 16, сжимая при этом пружинные наборы 20
Как только бойки освободят 10 заготовку, вся система возвращается висходное положение, способствуя этим лодаче заготовки в зону ковки. Так происходит при каждом ударе бойков.15
Синхронное смещение кик единого целого части 3 шпинделя и втулки 15 с фланцем 16 объясняется тем, что вся система пружинных наборов 12, 13, 19 и 20 взаимно уравновешена в исхрд 2д ном положении и поэтому при TAKIIX незначительных перемещениях детгиш 3 . и 16 находятся как бы во взвешенномг плавающем состоянии. Малейцюе воэдействие .на одну из них приводит к 25 емещени$р всей системы. За сгчет isToro Часть 3 шпниделя при тех иеэначитель- . Чых перемещениях (. «) котЬрые Происходят вследствие удлинения заго овки при каждом ударе бойков, прак-ад нчески ие1 оказывает 1 и1вления течению металла в сторо ну кле&(0й. Но так лроцехсшит только //Ьри малых перемемемиях. Вследствие
п1$исущей тарельчатым пружинам крутой характеристики, напряжений деформации указанные наборы пружин становятся практически жесткими при более значительных перемещениях. Поэтому при подаче заготовки в зону ковки движением всего манипулятора подвижная часть 3 илинделя не вносят: скольконибудь заметных погрешностей в величину подачи. Таким образом за счет уравновешенной системы тарельчатых пружин .удалось обеспечить легкую податливость шпинделя при малых перембЩенйях и вместе с тем его практически жесткую конструкцию при более значительных перемеи ниях.
При кввке заготовок ИекруглогЬ сечения (квешратных, прямоугольных и т.п.) без вращения шпинделя в пневмоцилиндр фиксатора 21 подается давление и фиксатор западает в одно из гнезд диска 22, фиксируя тем самым шпиндель, клещи и заготовку в заданном угловом положении и разгружая червячный 11ривод от возможных удар ных нагрузок. Червяк в в этом случае отключается (выключается его привод)
Врамржные окручивающие нагрузки на вп идель при ковке в этом случае поглощаются упругими втулками 14.
По сравнению с известным манипулятором использование изобретения позволясе повысить надежность работы мамияуяят фа тцж обработке заготовок р«1АУ1{иров«нием.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Манипулятор | 1977 |
|
SU694274A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
