о о 
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для подгибки труб в панелях | 1978 |
|
SU729907A2 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| Станок для двусторонней гибки труб | 1984 |
|
SU1304958A1 |
| Станок для двусторонней гибки труб | 1984 |
|
SU1292868A1 |
| Станок для подгибки труб в панелях | 1973 |
|
SU496941A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1989 |
|
SU1648592A1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| СТАНОК ДЛЯ ГИБКИ ТРУБНЫХ ПАНЕЛЕЙ | 1971 |
|
SU314580A1 |
| Станок для двухсторонней гибки труб | 1986 |
|
SU1449176A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
Изобретение относится к трубогибоч- ному производству и яв,1яется усовершенствованием станка для гибки трубных панелей но авт. св. № 1353553. Цель изобретения заключается в повышении качества за счет обеспечения параллельности отогнутых концов труб. Станок снабжен фиксатором, выполненным в виде корпуса с системой подпружиненных защелок, и силовым цилинд- ро.м поворота фиксатора. После окончания гиба последней трубы конечный выключатель подает сигнал на включение силового цилиндра поворота фиксатора. Фиксатор поворачивается, и трубы дополнительно отгибаются на угол пружинения. 7 ил.
го
Изобретение относится к котлостроитель- ной промышленности, к трубогибочному производству, а именно к оборудованию для гибки трубных панелей, и является усовершенствованием изобретения по авт. св. № 1353553.
Цель изобретения - повышение качества за счет обеспечения параллельности отогнутых концов труб.
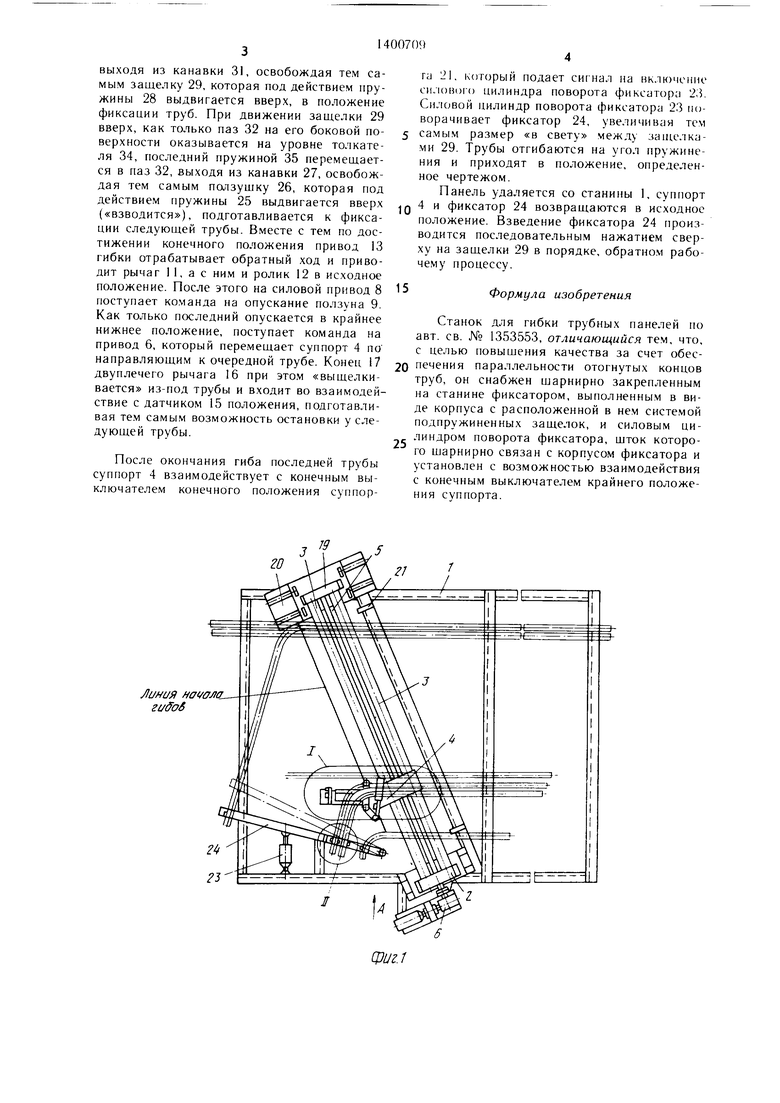
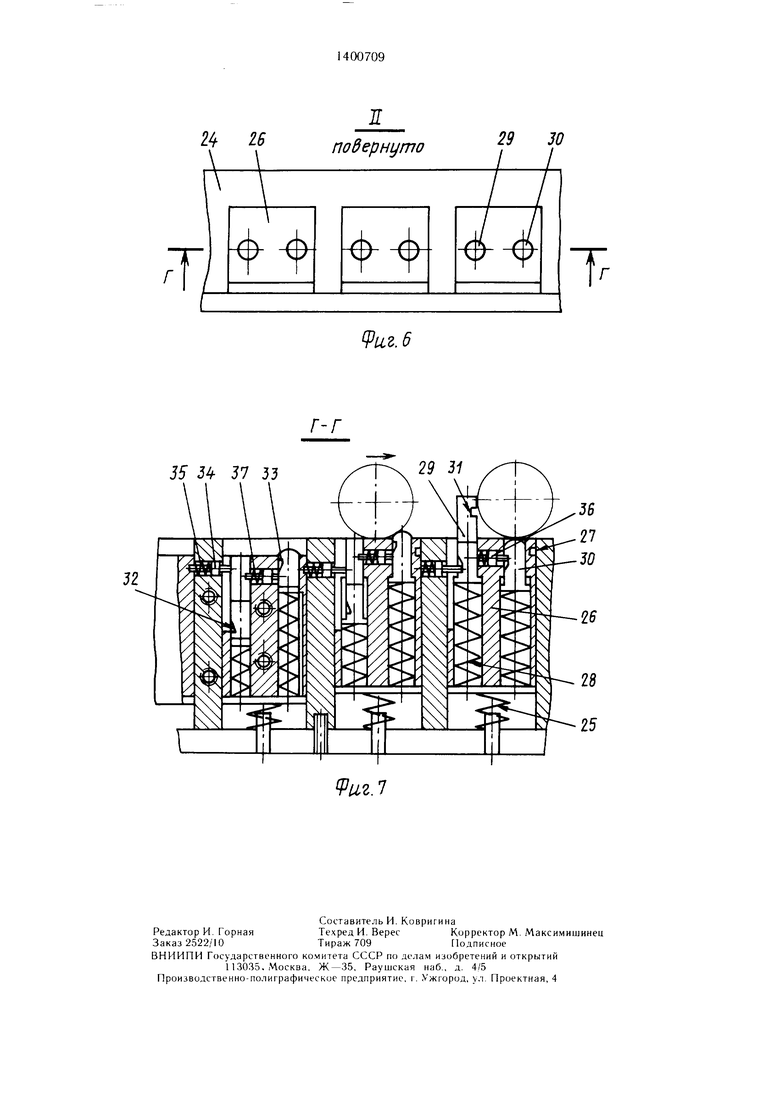
На фиг. 1 показан предлагаемый станок, вид сверху; на фиг. 2 - узел 1 на фиг. 1; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - вид В на фиг. 2; на фиг. 6 - узел II на фиг. 1; на фиг. 7 - разрез Г-Г на фиг. 6.
Станок имеет станину 1, на которой смонтирован портал 2, на направляющих 3 которого размещен суппорт 4, имеющий возможность перемещения по направляющим 3 при помощи ходового винта 5, имеющего электромеханический привод 6.
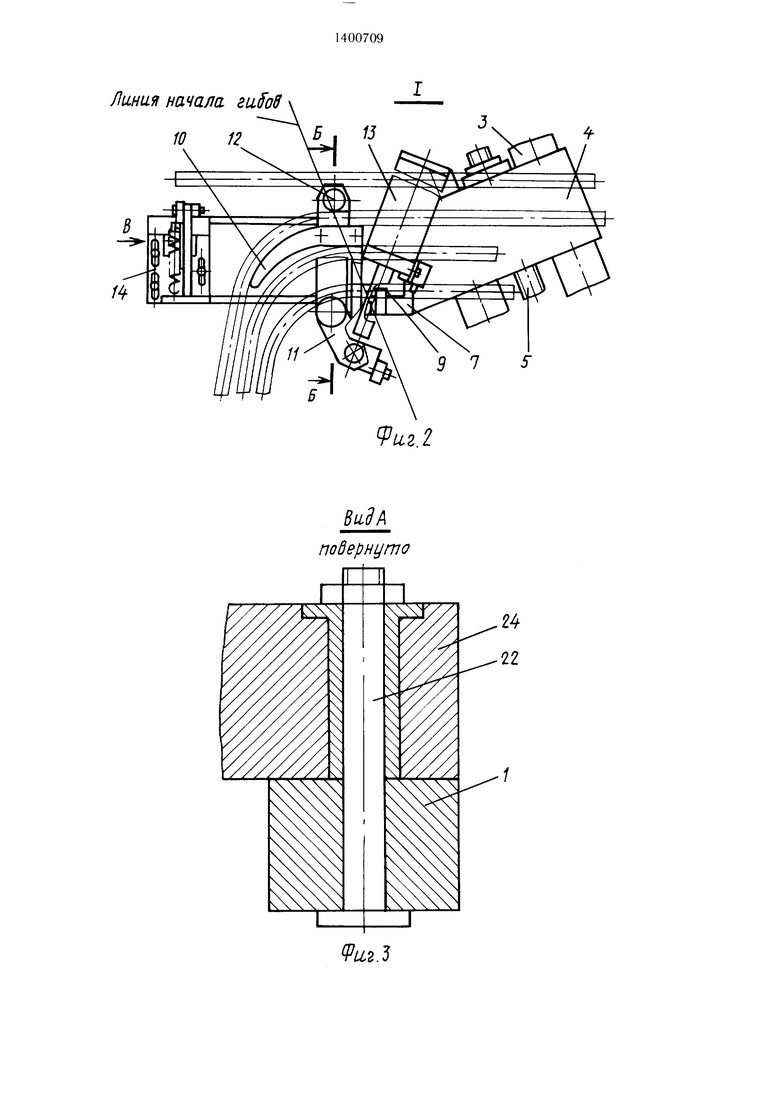
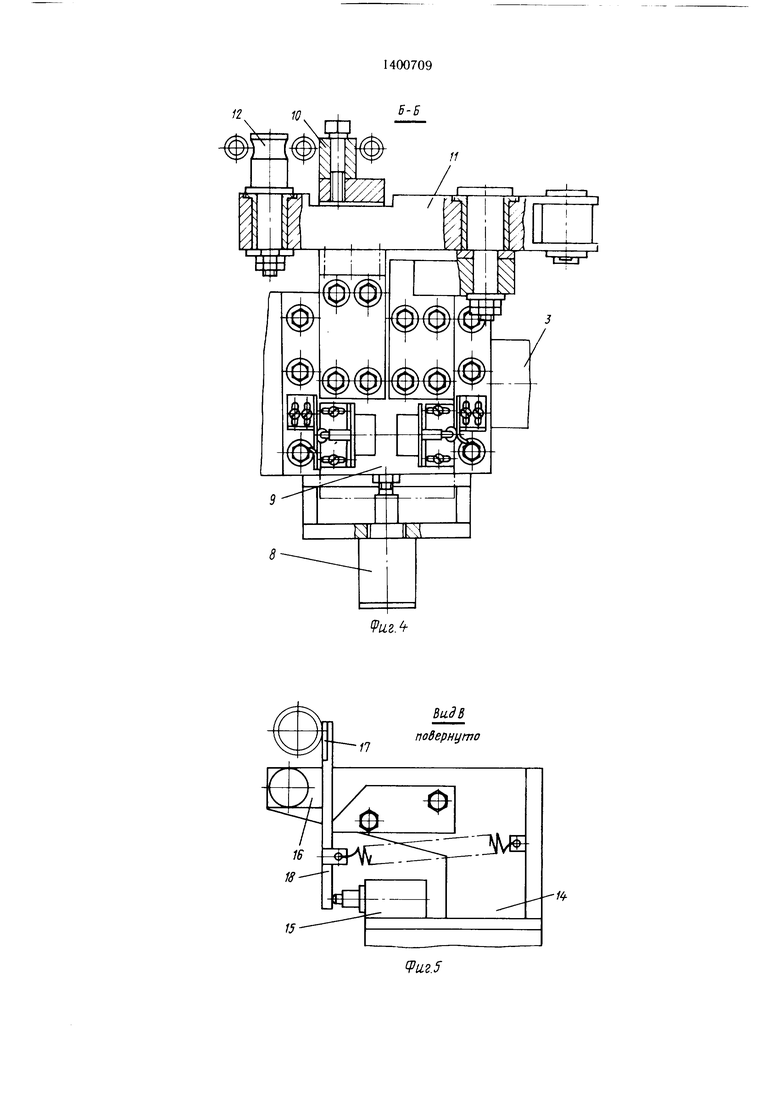
Суппорт 4 несет на себе призматические направ тяющие 7, в которых с возможностью перемещения в вертикальном направлении под действием силового привода 8 расположен ползун 9. На последнем смонтированы гибочный шаблон 10 и двуплечиий рычаг 11, на одном конце несущий гибочный орган- ролик 12, другой его конец щарнирно соединен с приводом 13 гибки, установленным на 1толзуне 9 с возможностью вращения вокруг оси, перпендикулярной плоскости панели. Суппорт несет на себе также консольно расположенный механизм 14 точной остановки, состоящий из датчика 15 положения и двуплечего рычага 16, один конец 17 которого взаимодействует с трубами панели, а другой 18 - с датчиком 15 положения.
Направляющие 3 портала, установленные его поворотом параллельно линии начала гибов, закреплены в опорах 19 портала, которые размещены на плитах 20, снабженных станочными пазами, что позволяет производить регулировку угла, который составляет линия гибов с продольными осями труб панели. В местах крайних положений перемещающихся частей установки смонтированы конечные выключатели. Выключатель крайнего положения суппорта 21 расположен в месте крайнего положения суппорта 4.
Кроме того, на станине 1 щарнирно с возможностью вращения относительно оси 22 под воздействием силового поворота фиксатора 23 цилиндра смонтирован фиксатор 24 труб. Последний состоит из системы расположенных в едином корпусе подпружиненных пружинами 25 ползушек 26, имеющих на одной своей грани канавки 27.
В ползущке 26 установлены с возможностью перемещения от пружины 28 защелка 29 и подпружиненный палец 30.
На защелке 29 имеются канавка 31 и наклонный паз 32. На пальце 30 также имеется наклонный паз 33.
В общем корпусе имеются расточки, в ко- 5 торых установлены толкатели 34, одним концом заведенные в канавки 27 с возможностью перемещения из них под воздействием пружины 35 до упора вторым концом в паз 32 защелки 29.
0 В ползушке 26 имеется расточка, в которой установлен толкатель 36, одним своим концом расположенный в канавке 31 защелки 29 с возможностью перемещения из нее под воздействием пружины 37 в паз 33 пальца 30. Станок работает следующим образом.
Перед началом гибки портал 2 разворачивается на плитах 20 так, что направляющие совпадают с направлением линии начала гибов труб панели.
0 Фиксатор, повернув относительно оси, устанавливают в исходное положение, при котором щаг между защелками «в свету соответствует щагу труб после изгиба их на угол, равный сумме угла по чертежу панели и угла пружинения.
Панель с прямыми трубами укладывается на станину 1 и закрепляется. Включается привод 6, винт 5 приводится во вращение и перемещает суппорт 4 по направляющим 3. Вместе с суппортом 4 перемещается меха0 низм 14 точной остановки. При этом двуплечий рычаг 16 своим концом 18 взаимодействует с датчиком 15 положения. Конец 17 двуплечего рычага 16 в это время перемещается в пространстве между трубами. Как только конец 17 рычага 16 входит во взаимо5 действие с трубой панели и отклоняется, конец 18 рычага 16 отходит от датчика 15 положения, подавая тем самым сигнал на установку привода 6, перемещающего суппорт 4, и сигнал на силовой привод 8 для
О выдвижения ползуна вертикально вверх. При выдвижении в призматических направляющих 7 ползуна 9 гибочный ролик 12 и гибочный шаблон 10 устанавливаются между трубами.
Ползун с размещенными на нем гибоч5 ным органом и гибочным щаблоном находится в крайнем верхнем положении. Конечный выключатель крайнего верхнего положения подает сигнал на привод 13 гибки, который поворачивает рычаг 11, а с ним ро- - лик 12, который обкатывает трубу, прижимая ее к гибочному шаблону 10, производя при этом гиб трубы.
По достижении конечного положения, определяемого углом, равным сумме угла гиба трубы по чертежу и угла ее пружине5 ния, труба нажимает на палец 30. При движении последнего вниз, как только паз 33 оказывается на уровне толкателя 36, последний пружиной 37 перемещается в паз 33,
выходя из канавки 31, освобождая тем самым защелку 29, которая под действием пружины 28 выдвигается вверх, в положение фиксации труб. При движении защелки 29 вверх, как только паз 32 на его боковой поверхности оказывается на уровне толкателя 34, последний пружиной 35 перемещается в паз 32, выходя из канавки 27, освобождая тем самым патзушку 26, которая под действием пружины 25 выдвигается вверх («взводится), подготавливается к фиксации следующей трубы. Вместе с тем по достижении конечного положения привод 13 гибки отрабатывает обратный ход и приводит рычаг 1 1, а с ним и ролик 12 в исходное положение. После этого на силовой привод 8 поступает команда на опускание ползуна 9. Как только последний опускается в крайнее нижнее положение, поступает команда на привод 6, который перемещает суппорт 4 по направляющим к очередной трубе. Конец 17 двуплечего рычага 16 при этом «выщелкивается из-под трубы и входит во взаимодействие с датчиком 15 положения, подготавливая тем самым возможность остановки у следующей трубы.
После окончания гиба последней трубы суппорт 4 взаимодействует с конечным выключателем конечного положения суппор иния HawM zi/ffo6
0
5
га 21, который подает сигнал па включение си. 1{))1)го цилиндра поворота фиксатора 23. Силовой цилиндр поворота фиксатора 23 поворачивает фиксатор 24, увеличивая тем самым размер «в свету между запамка- ми 29. Трубы отгибаются на угол пружине- ния и приходят в положение, определенное чертежом.
Панель удаляется со станины 1, суппорт 4 и фиксатор 24 возвращаются в исходное положение. Взведение фиксатора 24 производится последовательным нажатием сверху на защелки 29 в порядке, обратном рабочему процессу.
Формула изобретения
Станок для гибки трубных панелей по авт. св. № 1353553, отличающийся тем, что, с целью повыщения качества за счет обес- 20 печения параллельности отогнутых концов труб, он снабжен щарнирно закрепленным на станине фиксатором, выгюлненны.м в виде корпуса с расположенной в нем системой подпружиненных защелок, и силовым цилиндром поворота фиксатора, щток которого шарнирно связан с корпусом фиксатора и установлен с возможностью взаимодействия с конечным выключателем крайнего положения суппорта.
25
Лини91 начала aufoff
ВиП повернуто
fPu2.3
LiZ.2
15
5-Б
Виде повернуто
1
IB
L
IT
H
подернуто
т,
35 J 57 33
Уиг.б
| Авторское свидетельство СССР № 1353553, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
