ел
Изобретение относится к области куз- мечно-п|нч сового оборудования, а именно к ycrpoHCTiiaM, прелна;)наченнЬ)1м д.чя антома- ичееко смены штампов на прессе.
Цель изобретения новышение надежное и усгройстна.
Па фиг. 1 и:и)бражен() устройство, нид
i. iane; на (риг. z.
)а фез
А А на
фИ1. 1; на фиг. 3 ()азрез Б Б на фиг. 1; на фиг. 4разрез В В на фиг. 1, исходное положение : лементов нижне|-о стола; на (})иг. 5то же, но. южение эле.ментов нижнего cTo.ia носле установки на него на |})иг. 6разрез
Г Г на фиг. 2.
Устройство соде1)жил основание I, на ко Т()|)()м установлен стеллаж 2 с pacrio. io- женными одна над другой опорными плитами ;5 и 4, нанравляк)ни1е 5 и 6, смонтированные на нижн.ей нлите 3, нанрав- .iHHtHuie 7 и 8, смон гированные на ней нлите 4 и механизмы 9 и К), предна.(наченнЬ)1е для перемещении 1нтамн(}И II Б указанных направляющих 5 8.
.Механизм 9 содержит нолзун 12, разме- Н1енный на н. 1ите 3 между нанравляющими 5 и 6 в собственных нанравляюнгих 13 и 14, си,1()Н()й цилиндр 15, корпус ксгго- рого HiapHHpHO закреплен на плите :3, а HITOKна нолзуне 12, н размени нные
в назах 16, вынолнешплх в нолзуне 12, собачки 17, подпружиненные с номошью упругих элементов 18 от стенок пазов 1ь к упорам 19. (д)бачки 17 предназначены для захвата ползуном 12 Н1тамнов II, в днинхах 2() которых для этой це.. 1и предусмотрены отверстия 21 и 22.
Механизм 10 имеет аналогичную конструкцию и содержит размен1енный на верхней нлите 4 между направляющими 7 и 8 нолзун 23 снабженный собачками 24 и приводимый в движение силовым цилиндром 25.
В направляющей 7 предусмотрен н)оем 26, в котором размешены до1юлните.11ьные направляющие 27 и 28, закрепленные на плите 4 перпендикулярно наиравляюпщм 7 и 8 между П1тамновой плитой 29 пресса 30 и механизмом 31 для перемещения штампов 1 I к прессу 30. ЛДеханизм 31 снабжен клешевьзгм захвато.м 32 для зажима хвостовика 33 Н1тампов 1 1 и смонтирован на прикрепленном к стеллажу 2 кронштеГ;- не 34.
В дополните;|ьных направляющих 27 и 28 предуемотрены проемы 35 для прохода ползуна 23, а сами дополнительные направ- ляюп;ие 27 и 28 размешены двумя нарами упоров 36 и 37, которые в свою очередь смонтированы .между на11рав,;1яюшими 7 и 8. Имеюшие клиновидную форму упоры 36 установлены в выполненных в плите 4 пазах 38 и подпружинены от нее упругими элементами 39, а упоры 37 зак)е11- лены на штоках силовых цилиндров 40, жестко закрепленных на плите 4.
Стеллаж 2 смоптирован на основании 1 между подъемником 41 и вертикальной колонной 42.
Подъемник 41 содержит направляющие 5 стойки 43 и 44, пижняя часть которых закреплена на основании 1, а верхняя часть стянутая с помощью швеллера 45, ползун 46, размешенный между стойка.ми 43 и 44, н силовой цилиндр 47, корпус которого шарпирно соединен с основанием 1, а HJTOK -
с нолзуном 46. Па ползуне 46 закреплен П-образный стол 48, на котором смонтированы направляющие 49 и 50.
На неподвижно закренленной на основании 1 колонне 42 смонтированы верх5 нян 51 и нижняя 52 цапфы, шарнирно соединенные со штоками силовых цилиндров 53 и 54, корпуса которых шарнирно закреплены на стеллаже 2. На цапфах 51 и 52 на уровне направляющих 5 8 смонтированы соот1)етственно П-об разные
0 сюлы 55 и 56. На верхнем столе 55 установлены направ,:|яюп1ие планки 57 и 58, а па нижнем CTO, ie 56направляющая
планка 59 и расположенная параллельно ей (jcb 60, на кото|)ой смонтирован с воз. .можностью поворота кронн1тейн 61. На кронштейне 61 закрен, 1ены с возможностью взаимодействия со нпамном Н1а|)иковые уно- ры ()2 и 63, аз.мен1енные на нем под пря.мым углом дру к дру1 у таким образом, что когда cro.i 56 повернут к сте.а- .|ажу 2, в одном из цространсгвенных положений кроннп ейна 61 цри его разво- JOTe относительно оси 60 упоры ()2 и 63 оказываются распо.поженны.ми в общих п. юс- КОС1ЯХ с рабочими поверхп(;стя.ми 64 и 65 направляющей 6.
5 При этом в указанном положсч1пи стола 56 рабочие поверхности 6() и ()7 план ки 59 расноложены cooi велственно н обнгих плоскостях с рабочими поверхностями ()8 и 69 направляющей 5. Ось 60 смонтирс вана на выступе 70 П-образпой части cTO,:ia 5() ни0
0
же его поверхности, а центр тяжести кр(}нп тейна 61 расположен так, что его часть 71, несущая упор 62, в исходном положении упирается в выступ 70 (фнг. 4), и унор 62 выступает над горизонтальной рабочеГ но- верхностью 65 направляющей fi. На кронштейне 61 закреплено также устройство 72 д,1я считывания маркировочных знаков 73, нанесенных на стенки 74 Н1тампов 11.
На ко. юнне 42 между цапфами 51 и 52 на ншонке 75 установлена втулка 76, на коQ торой между нижними направляющими 5 и 6 с возможностью взаи.модействия со штампом I 1 закреплен дополнилельный упор 77 цилиндрической формы, расположенный на втулке 76 на уровне боковой стенки 78 установленного на столе 56 штампа 11 та5 КИМ образом, что когда стол 56 развернут к стеллажу 2, упор 77 оказывается расположенным в н)остранстве между направляющей планкой 59 и кронштейном 61.
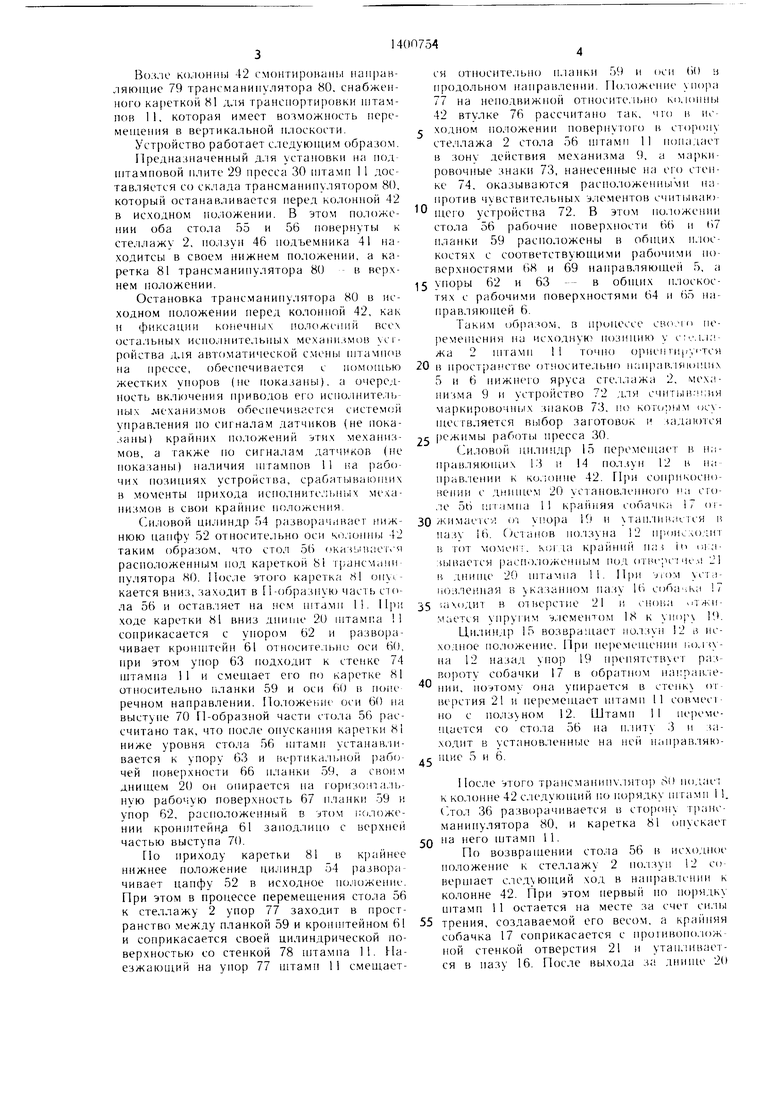
Bc)3:ie колонны 42 смонтированы на11|)ан- ляющие 79 трансманииулятора 80. снабженного ка)еткой 81 лли транснортн)0)ки Н1там- пов 11, которая имеет во: можность перемещения в вертикальной нлоскости.
Устройство работает следуюн1,им образом.
Преднаиначенн1)1Й для установки на гюд- н тамновой плите 29 пресса 30 штамп 11 доставляется со склада трансманипулятором 80, который останавливается перед колонной 42 в исходном положении. В этом положе- НИИ оба стола 55 и 56 повернуты к стеллажу 2, ползун 46 подъемника 41 па- .ходитсы в своем нижнем по.южении, а каретка 81 трансманипулятора 80 - в верхнем положении.
Остановка трансманипулятора 80 в исходном положении перед колонной 42, как и фиксации конечных положений всех (зста. 1ьных пснолнительных механизмов ус i- ройства для автоматической смены птампов на прессе, обеспечивается с помощью жестких упоров (не показапы). а очередность включения приводов его ис11олпите.1ь- иых механизмов обеснечиваегся сисгемой управления по сигналам датчиков (не пока- за}|ы) крайних положений Э гн механизмов, а также по сигналам датчиков (не показаны) наличия штампов 11 на рабочих позициях устройства, срабатываюпшх в моменты прихода исполнительных механизмов в свои крайние положения.
(л1Л(шой ци.;|индр 54 развс рачиваег нижнюю нанфу 52 относительно оси чолонп) 42 таким образом, что стол 5(i (.1казь1и; е1 я расположенным под кареткой 81 ii;aHC4 i in нулятора 80. После :JToro каретка 81 опускается вниз, заходит в П-образпую часть сю- ла 56 и остав.1яет па нем П1тамн 11. При ходе каретки 81 вниз днип1е 20 Н1тампа 1 1 соприкасается с упором 62 и разво)а- чивает кронп1тейп 61 oi посиге.лыи; оси 60, при этом упор 63 подходит к степке 74 штампа 11 и смещает его по каретке 81 oтп(Jcитeльпo планки 59 и осп 60 в гклк речном направлении. По. южеьис- оси 60 па выступе 70 П-образной части стола 56 рассчитано так, что после опускания каретки 81 ниже уровня стола 56 нггамп устанавлп- вается к упору 63 и ве)тпкальпой рабочей поверхнос1и 66 п.чапкп 59, а своим днищем 20 он опирается па г оризонт а.:п,- пую рабочую поверхность 67 планкп 59 и упор 62, расположенный в этом положении кроньчтейн.а 61 заподлицо с верхней частью выступа 70.
По приходу каретки 81 в крайнее нижнее ноложение пилиндр 54 развора чивает цапфу 52 в исходное положение. При этом в процессе перемеи1ения стола 56 к стеллажу 2 упор 77 заходит в пространство между планкой 59 и кронштейном 61 и соприкасается своей цилиндрической поверхностью со стенкой 78 Н1тампа 11. Па- езжаюии1Й на унор 77 штамп 11 смещает
г
5
20
4
1анки
ся отпосите.1ьн() плапки 59 и осп 60 в продольном направлении. По. южение упора 77 на неподвижной относительно колошП) 42 втулке 76 рассчитано так, ходном положении поверпутого
стеллажа 2 стола 56 П1тамп 1 I в зону действия механизма 9, ровочные знаки 73, нанесенные
ч 14) в ИСв сторону попадает а марки- а его cieiiке 74, оказываются распо,1оженп1 1ми па- против чувствительных элементов счит1 1вак)- щег о устройства 72. В этом по.южснпп стола 56 рабочие поверхности 66 и 67 планки 59 расположены в обп1их плоскостях с соответствующими рабочими по- верхпостями t)8 и 69 направляющей 5, а упоры 62 и 63 - - в общих плоскостях с рабочими поверхностями 64 и ti5 направляющей 6.
Таким об|1азо.м, в П пя1ессе с зо.мо перемещения па исходную позицию v , жа 2 штамп 11 точпо орпен 111( в пространстве относительно направ.ляющих 5 п 6 пижп(М 0 яруса сте,1лажа 2, мех; ,- мпзма 9 и устройство 72 для счпгыв: :;ия маркировочн1,1Х знаков 73, но когорым осх- |цесгв.1яется выбор заготовок задаются 25 |)ежимы пресса 30.
Силовой цплилдр 15 nepCMeniaer в ii;i- правляющих 1.3 и 14 ползун 12 в па прав.-|ении к колонне 42. При conpni ocHo- вении с днпще | 20 успановленного на сго- ле 56 шгампа 11 крайняя собачки 17 oi- кимас1С/; от упора И. п тап, 1ив; .сгся и ua:iy 16. Останов ио.тпна 12 п|И));1Пт 11 тот момен:. KOI la К)а11нпй п;и hi ога- зывается ):1Ожонным под отнерс 1 че.,1 21 к днище 20 HiTaMiia 11. При -лом уст)- и()злеиная в указанном пазу 16 соба-лча 7 в отнерстпе 21 г, cuoisa чтн-;п- .мается ynpyiHM элементом 18 к 19.
Цилиндр 15 возвращает ползун 2 з исходное положение. При иеремещенип г.олзу- на 12 назад унор 19 нренятствчег развороту собачки 17 в обратном на1:рав. 1е- нии, поэтому она у1шрается в стенкч от верстия 21 и перемещает 1птамп 11 совмес но с ползуном 12. Штамп II переме- П1ается со стола 56 па плиту 3 п заходит в установлепнь1е на ней нанравляк - щие 5 и 6.
30
35
40
45
5
0
После этого трансманишмятор 8i) no.iae к колоппе 42 следуюпиш по порядку штамп 1. Г/гол 36 разворачпвается в сторону транс- манинулятора 80, и каретка 81 онускает на него njTaMii 11.
По возвращении стола 56 в исходнс.н- положение к стеллажу 2 ползун 2 со верщает следующий ход в нанравлении к колонне 42. При этом nepBbiii по порядку П1тамп 1 1 остается на месте за счет сн.чы трения, создаваемой его весом, а крайняя собачка 17 соприкасается с прогивопо.юж- пой стенкой отверстия 21 и утан..нвает- ся в пазу 16. После выхода за дннще 20
iiL-pH(iro iiiTiiv.iui 11 она вначале возвращается VHpyiHM : ;|емент()м 18 н исходное положение, к упору 19, а затем нонада- ei под днище 2(i ycTapiofijenHoi о на CTo.ie ot i с.);цего Н(.) г|Г)рядку н тамна 1 1 и сио- |;а у |;и1.1ннается ii пазу 16. R -по время (медующая по норядку собачка 17 но.тзу- на 12 )икасаегся с днищем 20 нервого ппамиа 11 и также хтаидивается в своем пазу Hi. В момент остановки 11о;1зуна 16 каждая из указанных собачек 17 ползуна 12 заходит в отверс 1 ие 21 соответстнуюшег о Н1тамна 11, с аипием 20 которого оиа вза- имоде(1сгвуеп, и при обратном ходе ио,лзуна 12 пе 1емеп1.аег свой нггамн 11 на один таг н |аправ,1е11ии к 41.
Ла,1ее iiiiouecc подачи штампов I 1 в iia- i:|i;nt, liiKjunie 5 и 6 и. пггы 3 иовторяетч-я.
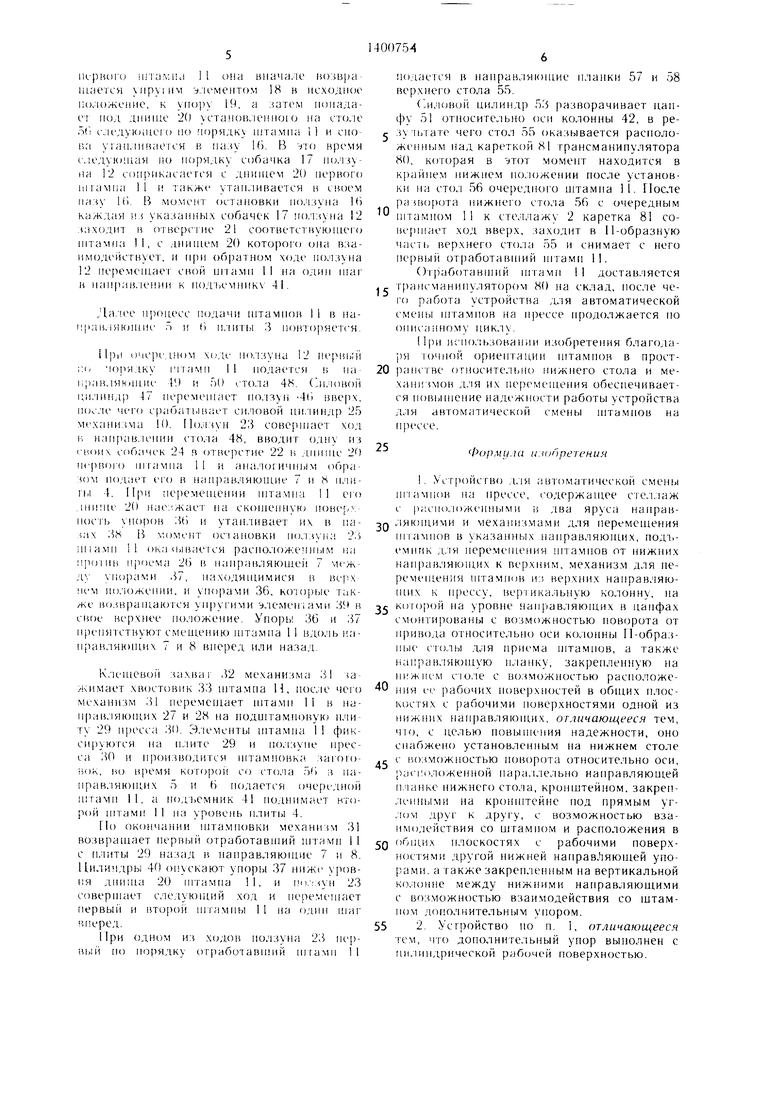
При очередном |;де но.тзуна 12 );ii ;: чоря.чку птами II нодается н на- lli)aвлякJH иe 40 и Г)() стола 48. (дитовой цилиндр 47 неремеи1ает но.тзуи 4li вве|)Х. после чего с)аоатывает силовой ии. 1индр 25 механи.зма 10. Ползун 2i5 eoBe iniae i ход i; .1спии етсхпа 48, вводит одну из 1Л1ОИХ собачек 24 в отверстие 22 в диише 20 )i4) шгамна 1 1 и ана,логичным образом нодает (М о в направляющие 7 и 8 Г1,1 4. 11|1и перемещении штампа II его днише 20 нае; .жает на скон1еннук) 11ове ;.;- ность viiopoB :5() и утаиливает их в пазах 38 И момент ос ишовки иолзуна 2.i iHuiMii 11 оказывается расио. южеюгым иа iipoiiiB н 1оема 21) в иап)авляк)ше)1 7 мсж- ч иорами 37, находящимися в ве| :х нем иоложении, и у |0|1ами 36, которые также 1ю.(врапи11огся ynpyi-ими эле,мен;ами ,39 к свое верхнее положение. Упоры 36 и ii7 нр(Ч1ятетнуют емеи1ению штампа 1 1 вдоль и;)- п 1авляк)ших 7 и 8 вперед или назад.
Кле1иево| | захват 32 механизма ii I за- /кимает хвостовик 33 штампа И, после чего Механизм 31 перемсп1ает И1та.мп 11 в на- и|)авляк)|цих 27 и 28 на подштамповук.1 плиту 29 пресса 30. Элементы штампа 1 1 фик- си|)уюгся на н.тите 29 и по.чзуне ирес- са ,30 н нрои.зводится штамповка .загого- iioK, во время кото)ой со cTo, ia 56 в па- нрав,1як)|цих 5 и 6 подается очередной штамп II, а под1 емник 41 поднпма.ет второй нпами 1 1 на уровень нлиты 4.
По окончании штамповки механизм 31 возврапаает nepBiiiii отработавший lUTaMri 1 I с плиты 29 азад в направляющие 7 и 8. Цилиндры 40 опускают упоры 37 ниже уровня дшпаа 20 nrraMiia 11, и ni).-;:iyH 23 совери1ает следующий .ход и пе Н меп1ает первый п )й Н1гамны 1 1 на однн шаг вперед.
При ОДНСЛ1 и.з ходов ползуна 23 нс р- вый по порядку отработав1пий nira.Mn 11
0
подаегся в направ;1Я1он1ие планки 57 и 58 верхнего стола 55.
(л1лов(Л1 цилиндр 53 разворачивает цапфу 51 относительно оси колонны 42, в ре- зу и/гате чего стол 55 оказывается расположенным над кареткой 81 грансманипулятора 80, когорая в этот момент находится в крайнем нижнем но.южении после установки па стол 56 очередпого штампа 11. После разво)ота нижнего стола 56 с очередным П1там11()м 1 1 к стеллажу 2 каретка 81 со- ве|1П1ает ход вверх, заходит в П-образную част, верхнего ето.та 55 и снимает с него первый от|)аботав111ий штамп 11.
Отработавпгий нггамп I 1 доставляется
грапсманинулятором 80 на склад, после чего работа устройства для автоматической смены И1тамиов на прессе продолжается но описаиному циклу.
При )1С по, ьзовании изобретения благода- |)я точной ориептации П1тампов в прост0 рансгве отноеите.чьно нижнего стола и механизмов для их 11е)(мешения обеспечивается повышение надежности работы устройства для автоматической смены штамнов на н К сее.
25
0орл(ц,7а и:« претения
I. Усгройегво .ыя автоматической смеп1 1 нпампов на прессе, содержащее стел.таж с р;;сноложсч1пым11 is два яруса нанравЛЯЮ1ЦИМИ и мехапиз.мами для перемещения П1тамнов в указанных паправляющи.х, подт.- емппк д.тя перемещения штампов от пижпих паправля1()ии1х к верхним, механизм для пе- ремен1ен11я 1птампов и;; вер.хних паправляю- шпх к п)еесу, вертикальную колонну, на
кого)ой па уровне нан :1авляюп.и1х в цапфах смонтированы с возможностью поворота от привода от 1осительпо оси колонны П-образ- столы для прпема штампов, а также направляющую нлапку, закрепленную па нижнем сюле с возможностью расположепня се рабочих поверхпостей в общих плос- | остях с рабочими поверхностями одной из нижних панравляющих, отличающееся тем, чи), с целью повышения надежности, оно спабжепо установленным на нижнем столе
с юзможностью поворота относительно оси, расположенной 11ара,1лельпо направляющей гаапке пижнего стола, кронштейном, закрепленными па кро11 птейне под прямым углом друг к другу, с воз.можностью вза- имодействия со штампом и расположения в
общих плоскостях с рабочими поверх- нос 1 ями другой нижней направляющей упо- )ами. а также закреп.тенным на вертикальной Kfxioinie между нижними направляющими с воз.можностью взаимодействия со штампом дополнительным упором.
2. Устройство но п. 1, отличающееся тем, что дополнительный упор выполнен с пн.ишдрической раб(}чей поверхностью.
45
57 55
сриг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УСТАНОВКИ КРУПНОГАБАРИТНЫХ ШТАМПОВ НА ПРЕССБ[ И СНЯТИЯ ИХ | 1966 |
|
SU181602A1 |
| Способ автоматической смены штампов на прессе и устройство для его осуществления | 1985 |
|
SU1344487A1 |
| Способ подачи полосового материала к прессу и устройство для его осуществления | 1985 |
|
SU1279719A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ В ЛЕНТЕ | 1970 |
|
SU259036A1 |
| Способ автоматизированного монтажа сменного пакета штампа в прессе и устройство для его осуществления | 1989 |
|
SU1712036A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Производственный модуль для штамповочных работ | 1988 |
|
SU1685576A1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU729085A1 |
| Штамповочный комплекс для изготовления деталей из полосового материала | 1985 |
|
SU1286328A1 |
| Устройство для вырубки изделий из резины | 1976 |
|
SU649596A1 |


Изобретение относится к области ку;-(- нечно-прессового оборудования, а именно к устройствам для автоматической смены штампов на прессе. Цель - повышение надежности в эксплуатации. Устройство содержит стеллаж с расположенными в два яруса направляющими (Н), под1)емник для перемещении штампов (Ш) от нижних Н к верхним Н, вертикальную колонну 42, на которой смонтированы верхний стол (С) и нижний С 56 для приема Ш, закрепленную на С 56 направляющую планку 59. На С 56 установлен с возможностью поворота крон1птейн 61, на котором закреплены с возможностью взаимодействия со Ш упоры 62, 63, а также закрепленный на колонне 42 между нижними Н с возможностью взаимодействия со Ш дополнительный упор 77. Посредством каретки трансманипулятора Ш опускаепся на С 56. Днище Ш давит на упор 62 и разворачивает кронн тейн 61. Упор 63 воздействует на L1J, смещает его на каретке относительно нланки 59. Привод 54 )азворачивает С 56 к стел. шжу. Упор 77 взаимодействует с Ш и пере.меншет его в сторону нижних Н. По нижним Н, затем fio -верхним Н приводом Ш перемещается в рабочую позицию пресса. 1 з. п. ф-лы, 6 ил. i (Л
U8
//
15 П25
Фиг 2
2
60
сриг.
6-6
в-в
st
| Устройство для электроэрозионного вырезания | 1985 |
|
SU1371816A1 |
