Изобретение относится к устрой- 1ствам для транспортирования, в част- ности к транспортным механизмам гиб- :ких автоматизированных производств, ;предназначенным для передачи изделий нли тары с изделиями между двумя или несколькими перегрузочными местами, обслуживаемыми транспортными манипуляторами, и межоперацнонного накоп- ления,
I Целью изобретения является повышение технологических возможностей за счет упрощения организации мест перегрузки на произвольном участке трассы перемещения горизонтально замкнутого цепного контура с закрепленными на нем тележками.
На фиг.1 изображено автоматизированное передаточное устройство, об- |щий вид; на фиг,2 - то же, вид свер- ху.
Автоматизированное передаточное устройство включает приводной 1, натяжной 2 и промежуточный 3 модули, каждый из которых содержит часть шасси или опорного пути 4. Приводной модуль 1 включает привод 5. Модули объединены горизонтально замкнутым цепным контуром 6 с закрепленными на нем тележками 7 для транспортирова- ния грузЬв (тар) 8. Тележки 7 соединены с цепным контуром 6 через два эластичных элемента 9 и 10, например пружины, допускающие в определенных пределах смещение тележек 7 относительно места крепления в направлении Их движения. На шасси 4 в зоне мест перегрузки устан овлены жесткие управляемые упоры 1.1, позволяющие останав ливать любую из проходящих тележек 7 В нормальйом положении упоры 11 утоплены и допускают свободное прохождение тележек 7, Перед упором 11 предусмотрен датчик положения тележек, включающий статорную часть 12, входящую в состав места перегрузки, и роторную часть 13, закрепленную на тележках 7, Датчик предназначен для формирования команды на отключение привода 5 при входе необходимой тележки 7 в зону останова места перегрузки. Останов тележки 7 осуществляется жестким управляемым упором 11.
Установка на место перегрузки транспортируемого груза 8 осуществля ется транспортным манипулятором 14, который в состав передаточного устройства не входит. Наличие груза 8
0
5
0
5 0 5 0
0
5
на тележке 7 определяется датчиком наличия тары, содержащим статорную часть 15, входящую в состав места перегрузки, роторную часть 16, выполненную с возможностью перемещения в вертикальной плоскости.
Устройство снабжено также датчиком 17 идентификации, статор которог-о в входит в состав места перегрузки и представляет собой, например, оптрон- ную пару с усилительно-преобразовательной частью, а ротор, выполненный в виде, например, пластины с нанесенным на нее штриховым кодом, укреплен на транспортируемом грузе 8.
Опорньй путь тележек 7 выполнен в виде плит 18 с перфорациями 19 для крепления управляемых упоров 11 и перфорациями 20 для крепления датчиков идентификации транспортируемого груза и датчиков для контроля положения тележек.
Устройство работает следующим образом.
Груз (тара) 8 с одного или нескольких направлений поступает с по- мощью транспортных манипуляторов 14 к передаточному устройству и останавливается над заданным перегрузочным местом. По команде устройства управления включается привод 5 передаточного устройства и свободная тележка 7 подается к перегрузочному месту. При входе в зону перегрузочного места активизируется датчик положения тележки и датчик наличия тары, сигналы с которых поступают в устройство управления, где формируются команды на включение упора 11 и отключение привода 5. Тележка 7 останавливается упором 11, при этом цепной контур 6 продолжает движение за счет инерционного выбега, что обеспечивается наличием компенсационных эластичных элементов 9 и 10 в узле крепления тележки к цепному контуру 6, Ход компенсационных эластичных элементов 9 и 10 больше пути выбега цепного контура 6. При этом ход тележки 7 регулируется смещением статора 13 датчи- ка положения тележки. Этим достигается уменьшение ударных нагрузок на тележку 7 и привод 5. После подтверждения , что тележка находится на перегрузочном месте и свободна, груз 8 onycKaeTqH транспортным манипулятором 14 на теЛежку 7. После получения подтверждения от датчика наличия тары.
Г9 20 18
I/ /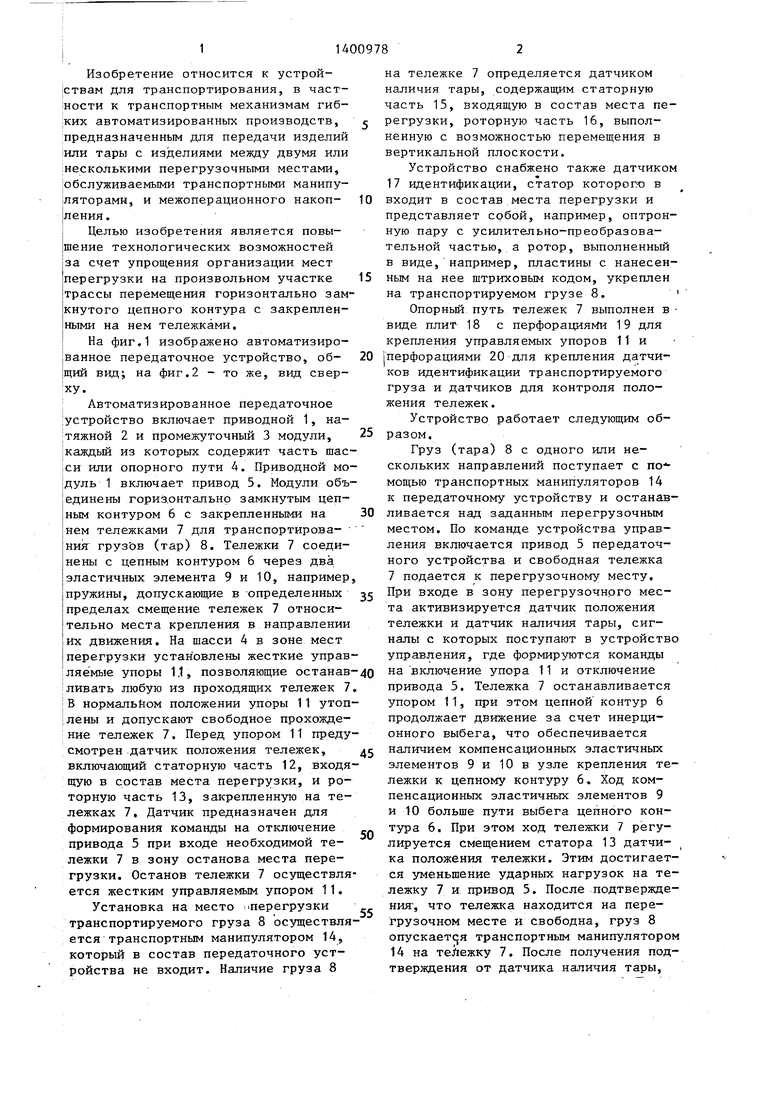

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоярусное транспортно-накопительное передаточное устройство | 1986 |
|
SU1407864A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| Автоматическая линия для транспортировки полуфабрикатов | 1973 |
|
SU653186A1 |
| Устройство для передачи штучных грузов | 1981 |
|
SU971745A1 |
| Устройство для транспортирования и передачи изделий между конвейерами,расположенными на разных по высоте уровнях | 1985 |
|
SU1306857A1 |
| Устройство для перемещения и перегрузки тарных грузов | 1985 |
|
SU1298157A1 |
| Транспортная система автоматической линии | 1980 |
|
SU897475A1 |
| СЕКЦИОННЫЙ ТРАНСПОРТЕР ДЛЯ ПЕРЕМЕЩЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ ЧЕРЕЗ ПРОСТРАНСТВА С ПРЕПЯТСТВИЯМИ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ТРАНСПОРТИРОВКИ СЫПУЧИХ МАТЕРИАЛОВ | 2015 |
|
RU2602156C2 |
| ГОРИЗОНТАЛЬНО ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1991 |
|
RU2013330C1 |
Изобретение относится к устр-вам для транспортирования, в частности к транспортным механизмам гибких автоматизированных производств. Цель изобретения - повышение технол. возможностей за счет упрощения организации мест перегрузки (МП) на прока- - вольном участке трассы перемещения горизонтально замкнутого цепного контура с закрепленными на нем тележками (т). Устр-во включает горизонтально замкнутый контур с закрепленными на нем Т 7, опорный путь 4 для Т 7 и МП с жесткими управляемыми упорами 11, датчиками (Д) 17 идентификации транспортируемого груза 8, Д контроля положения Т 7 для формирования команды на переключение привода, Д наличия груза 8. Путь 4 вдоль трассы перемещения контура с Т 7 выполнен в виде плит с перфорациями для крепления в МП упоров 11, Д 17 и Д контроля положения Т 7. Установка на МП груза 8 производится манипулятором 14. При включении привода свободная Т 7 подается к МП и активизируются Д контроля положения Т 7 и Д наличия груза 8. Сигналы с них поступают на устр-во управления, формирующее команды на включение упора 11 и отключение привода. При этом Т 7 останавливается. 2 ил. с se (Л о о со ч 00
| Транспортное устройство контрольноизмерительного автомата | 1976 |
|
SU602766A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Спиваковский А.О | |||
| и др | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и доп.- М.: Машиностроение, 1968, с | |||
| Автоматический тормоз к граммофону | 1921 |
|
SU303A1 |
