Изобретение относится к устройствам для транспортирования и накопления, в частности к транспортным механизмам гибких автоматизированных производств, предназначенным для передачи изделий или тары с изделиями межд двумя или несколькими перегрузочными местами, обслуживаемыми транспортными манипуляторами, и межоперационног накопления.
Цель изобретения - повьпиение технологической гибкости устройства путем улучшения условий обслуживания горизонтально замкнутых конвейеров при перегрузке грузов.
На фиг. 1 изображено многоярусное транспортно-накопительное передаточное устройство, вид сбоку; на фиг. 2 - то же, вид сверху.
Многоярусное транспортно-накопительное передаточное устройство включает транспортно-накопительные ярусы 1, выполненные в виде установленных на разных уровнях горизонтально замкнутых конвейеров с автономными приводами 2, тяговьти органами 3, и программное управление 4.
На казкдом яресу организованы места 5 перегрузки, включающие блок 6 датчиков в составе, например, датчиков останова, наличия груза, идентификации и т.д. и управляемый фиксатор 7 транспортируемого груза 8.
Горизонтально замкнутые конвейеры установлены один относительно другог ступенчато со сдвигом в направлении, перпендикулярном оси транспортирования нииеележащего горизонтально замкнутого конвейера,, на расстояние, болычее габаритного размера груза 8.
Установка на места перегрузки транспортируемых грузов 8 осуществляется транспортными манипуляторами 9.
Устройство работает следукхцим образом.
Груз (.тара) 8 с одного или нескольких направлений поступает с транспортных манипуляторов 9 и устанавливается под заданным перегрузочным местом. По команде устройства управления включается привод 2 соот0
5
0
5
0
5
0
5
0
ветствуюцего конвейера, и его свободная ячейка подается к перегрузочному месту 5. При входе в зону перегрузочного места 5 активизируются соответствующие датчики блока 6 датчиков, сигналы с которых поступают на программное управление 4,гдб формируются команды на включение управляемого фиксатора 7 и отключение привода 2.
После подтверждения, что свободная ячейка находится на перегрузочном месте 5, груз 8 опускается транспортным манипулятором 9 в свободную ячейку. Аналогичным образом осуществляется заполнение других ячеек конвейера.
Для разгрузки программное управление 4 инициирует в блоке 6 датчиков датчик идентификации, установленный перед заданным перегрузочным местом, и включает привод 2 данногр яруса 1. Грузы 8, проходя мимо датчика идентификации, идентифицируются в соответствии с заданием.
При совпадении считанного кода с заданным программное управление ,фор- мирует команду на останов необходимой ячейки и при выполнении зтой команды сигнал о выполнении задания на выдачу груза 8. Транспортный манипулятор 9 забирает груз 8.
Формула изобретения
Много ярусное транспортно-накопительное передаточное устройство,включающее расположенные на разных уровнях горизонтально замкнутые конвейеры с автономными приводами и программным управлением, отличаю- |Щ е е с я тем, что, с целью повышения технологической гибкости устройства путем улучшения условий обслуживания горизонтально замкнутых конвейеров при перегрузке грузов, они установлены относительно друг друга ступенчато со сдйигом в горизонтальной плоскости в направлении, перпендикулярном оси транспортирования нижележащего горизонтально замкнутого конвейера.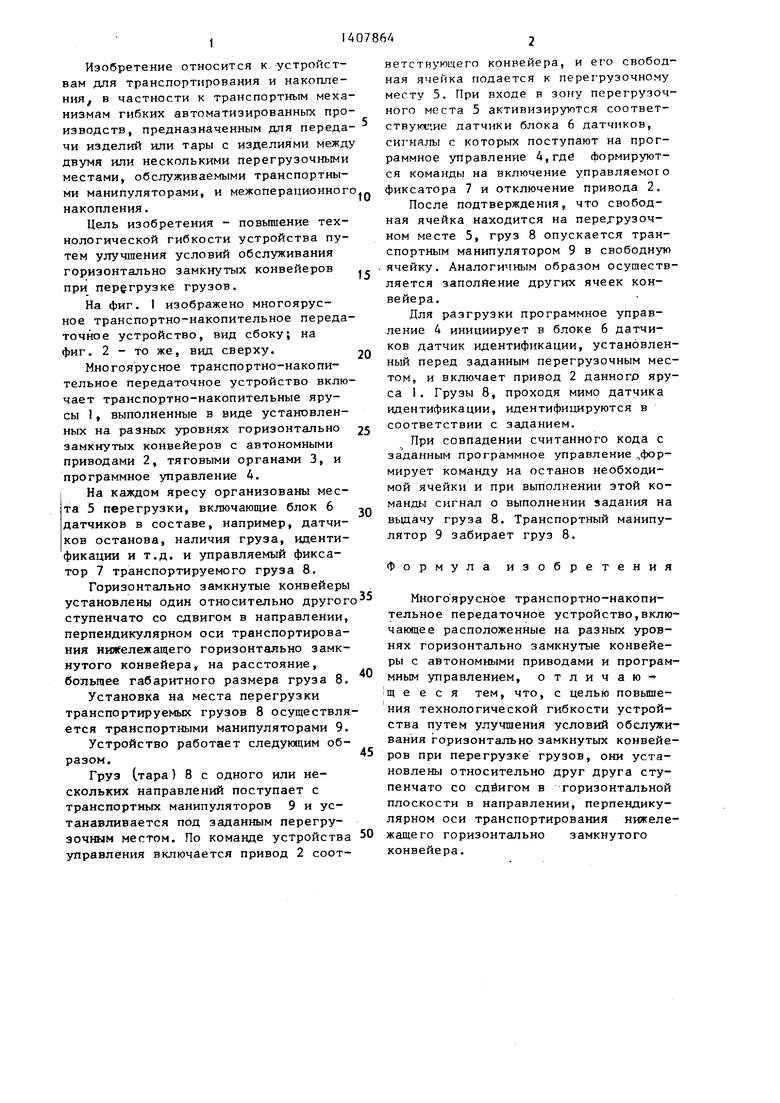
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированное передаточное устройство | 1986 |
|
SU1400978A1 |
| АВТОМАТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1992 |
|
RU2045384C1 |
| МЕХАНИЗИРОВАННЫЙ СКЛАД | 1989 |
|
RU2033377C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| Конвейер для распределения грузов | 1984 |
|
SU1273317A1 |
| Автоматическая линия для транспортировки полуфабрикатов | 1973 |
|
SU653186A1 |
| Поточно-автоматизированная линия абразивной зачистки отливок | 1990 |
|
SU1824252A1 |
| Конвейер для несинхронной сборки | 1989 |
|
SU1728097A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Гибкая производственная система | 1988 |
|
SU1743802A1 |
Изобретение относится к устр-вам для транспортирования и накопления, в частности к транспортным механизмам гибких автоматизированных производств. Цель изобретения - повьшение технологической гибкости устр-ва путем улучшения условий обслуживания горизонтально замкнутых, конвейеров (К) при перегрузке грузов (Г), Устр-во вклюJ 6 чает транспортно-накопительные ярусы I, выполненные в виде установленных на разных уровнях горизонтально замкнутых К с автономными приводами 2, тяговыми органами 3, и программное управление 4. Установленные ступенчато относительно друг друга К сдвинуты в горизонтальной плоскости в направлении, перпендикулярном оси,транспортирования нижележащего К. Установку Г 8 на места перегрузки производят транспортными манипуляторами 9. На каждом ярусе 1 организованы места перегрузки с блоком датчиков 6. При включении привода 2 соответствующего К его свободная ячейка подается к месту перегрузки. При входе в зону места перегрузки активизируются датчики 6. Сигналы с последних поступают на-управление 4, формирующее команду на отключение привода 2. Затем Г 8 манипулятором 9 опускается в свободную ячейку. 2 ил. с- сл 00 Од 1
-«--
/ /Т
4j
oS
jj
| Установка для межоперационного транспортирования грузов | 1983 |
|
SU1174350A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ПОДВЕСНОЙ СКЛАД | 0 |
|
SU270593A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
