(54) СЛЕДЯЩАЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1401436A2 |
| Следящая система | 1975 |
|
SU534738A1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| Комбинированная самонастраивающаяся следящая система | 1974 |
|
SU548838A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Следящая система с комбинированным управлением | 1983 |
|
SU1136106A2 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| Следящий привод | 1982 |
|
SU1049864A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Следящая система | 1979 |
|
SU849135A1 |
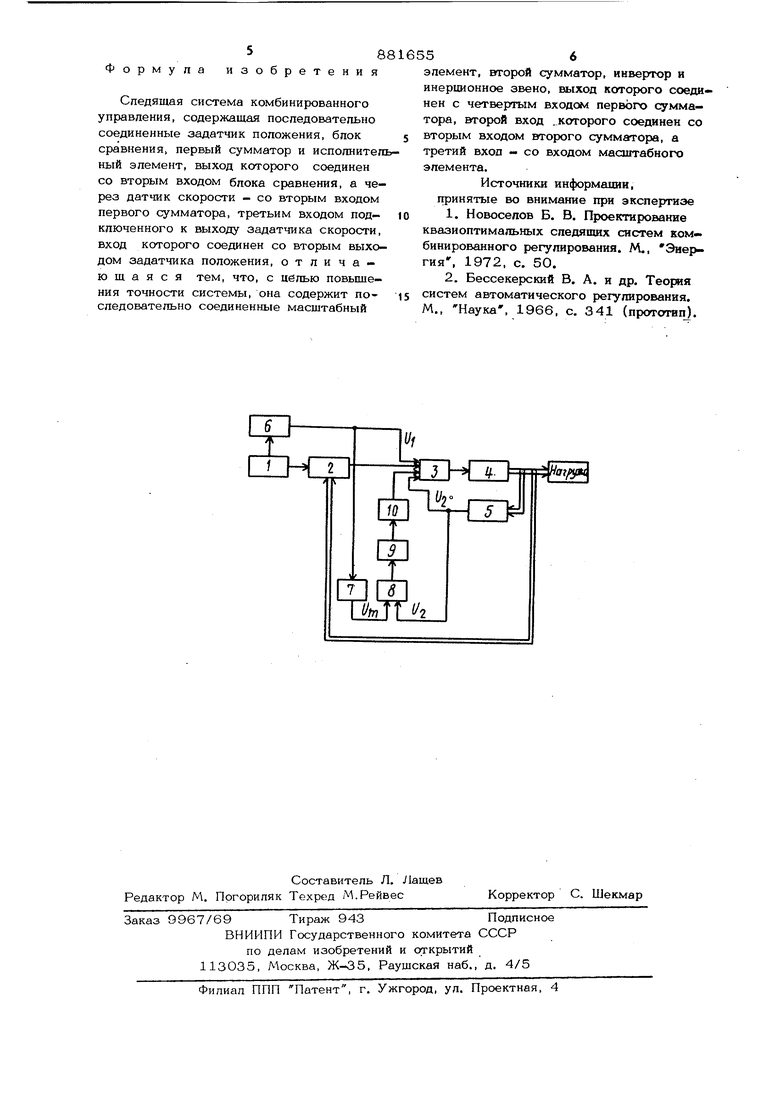
Изобретение относится к автоматическому регулированию и может быть использовано в радиотехнических системах, приборостроении, станкостроении и т.п. Известна следящая система комбинированного управления,в которой для повьпиения точности слежения используется компенсирующая следящая система fl. Недостатком такой системы является невысокая точность слежения, вызванная параметрическими возмущениями, воздействующими как на основную следящую систему, так и на компенсирующую. Наиболее близкой по технической сущности К изобретению является система, содержащая последовательно соединенные задатчик положения, блок сравнения, первый сумматор и исполнительный элемент, выход которого соединен со вторым входом блока сравнения, а через датчик скорости - со вторым входом первого сумма тора, третьим входом подключенного к вы ходу задатчика скорости, вход которого соединен со вторым выходом задатчика положения . Недостатком данной системы является невысокая точность при изменении крутизны выходной характеристики задатчика и датчика скорости. Применение отрицательной обратной связи по скорости уменьшает ошибку системы, обусловленную нестабильностью элементов (усилителя и двигателя), но не уменьшает погрешность, вызванную уходом параметров датчика скорости и задатчика скорости. Уход параметров при изменении внешних условий в существующих серийно изготовляемых дат чиках скорости, выполненных на тахоге- нераторах (например совмещенные двига тели - генераторы серии ДГ), достигает 30%. Целью изобретения является повышение точности системы. Поставленная цель достигается тем, что след5пцая система комбинированного управления содержит последовательно соединенные масштабный элемент, второй 3fi сумматор, инвертор и инерционное звено, выход которого соединен с четвертым вхо дом первого сумматора, второй вхоД кото рого соединен со вторым входом второго сумматора, а третий вход - со входом масштабного элемента. На чертелсе представлена функциональная схема предлагаемой следящей системы. Следящая система комбинированного управления содер кит последовательно соединенные задатчик положения 1, блок сравнения 2, суммирующий усилитель первый сумматор 3 и исполнительный эле мент 4, а также датчик скорости 5 и задатчик скорости 6. Выход исполнительного элемента 4 механически связан с осью приемника - -блоком сравнения 2 и через датчик скорости 5 соединен со вторым входом суммирующего усилителя 3,тре- тий вход которого соединен с выходом за датчика скорости 6, Кроме того, следящая система снабжена последовательно соединенными масштабным элементом 7, вторым сумматором 8, инвертором 9 и инерционным звеном 10. При этом вход масштабного элемента 7 подключен к выходу задатчика скорости 6, второй вход сумматора 8 - к выходу датчика скороети 5, а выход инерционного звена 10 - к четвертому входу суммирующего усилителя 3. Предлагаемая следящая система рабо™ тает следующим образом, В нормальных условиях в масштабном элементе 7 осуществляется масштабирование сигнала U,i ДО ве;гачины Uy, U с тем, чтобы результирующ51й й1гнал на вы ходе сумматора 8, а, следовательно, и инерционного звена 10, был равен нулю. Работа системы приведена для двух: случаев. Крутизна датчика скорости 5 не меня ется, а меняется только крутизна задатчика скорости 6 В этом случае в установившемся режиме при движении входной оси системы с постоянной скоростью 51.оу СОИеЬ(при этом в нескомпенсирован ной системе выставляется глубина жестк связи по скорости К и необходимый коэф фициент переда ш масштабного элемента К -jiS-.J) результирующее напряжение - на входе суммирующего усилителя 3 следящей системы при всех условиях эксплу атации равно и,, ©g-U s-b , Так, например, при U 100 мВ и нaпpялteниeUз.,U(9 10мЕ, SS 0- 0. При этом напряжение на выходе инвертора 9, а следовательно, и инерционного звена 1О .-VO: Если же под воздействием внешних условий напряжение U уменьшается, например на 20% (следовательно, (J 1)(10,2) 80 мВ, а 0 0,.0,9 72 мВ), то на выходе инерционного звена 1О появится напряжение 72-90 -18 мВ. Тогда динамическая ошибка системы ст-анет + (),,i -80-18 +90+10 +2 мВ, в то время как ошибка в известной системе равна + U2 +Uy--еО -90-(-10- + 20мВ. Крутизна задатчика скорости 6 не ме няется, а меняется только крутизна датчика скорости 5. В этом случае при падении напряжения OQ, на 20% напряжение J Ug {1-0,2)-72 мВ; а UK 90-72 18 мВ.. . При этом динамическая ошибка системы равна 6 -U - -UK-U2 +Ue: -100+18+72+ + 10-О. Таким образом, уход крутизны выходной характеристик датчика скорости 5 не сказывается на динамической точности следящей системы. Введение инерционного звена 10 в предлагаемук) систему необходимо для обеспечения устойчивости следящей системы. В качестве инерционного звена 10 можег .быть использовано, например, инерционное звено первого пор5щка (апериодическое), хотя в принципе могут использоваться и дискретные звенья (например последовательно соединенные импульсный элемент и фиксатор). Использование предложенного технического решения позволяет обеспечить высокую точность слежения как в нормальных условиях, так и при изменении температуры окружающей среды. При этом в следящей системе могут применяться серийные, датчики скорости с большим температурным дрейфом крутизны выходной характеристики. Применение предлагаемой системы позволяет повысить точность следящей системы до 3 (по сравнению с известной системой без компенсашп-i уходов крутизны датчиков скорости, имеющей точность 15 ) при уходе крутизны выходной характеристики датчиков скороети на +30% и скорости слежения Q 1()0°/с.
Формула изобретения
Следящая система комбинированного управления, содержащая последоватепьно соединенные задатчик положения, блок
сравнения, первый сумматор и исполнителный элемент, выход которого соединен со вторым входом блока сравнения, а через датчик скорости - со вторым входом первого сумматора, третьим входом подключенного к выходу задатчика скорости, вход которого соединен со вторым выходом задатчика положения, отличающаяся тем, что, с цблью повышения точности системы, она содержит последовательно соединенные масштабный
элемент, второй сумматор, инвертор и инерционное звено, выход которого соединен с четвертым входом первого сумматора, второй вход .которого соединен со вторым входом второго сумматора, а третий вход - со входом масштабного элемента.
Источники информации, принятые во внимание при экспертизе
