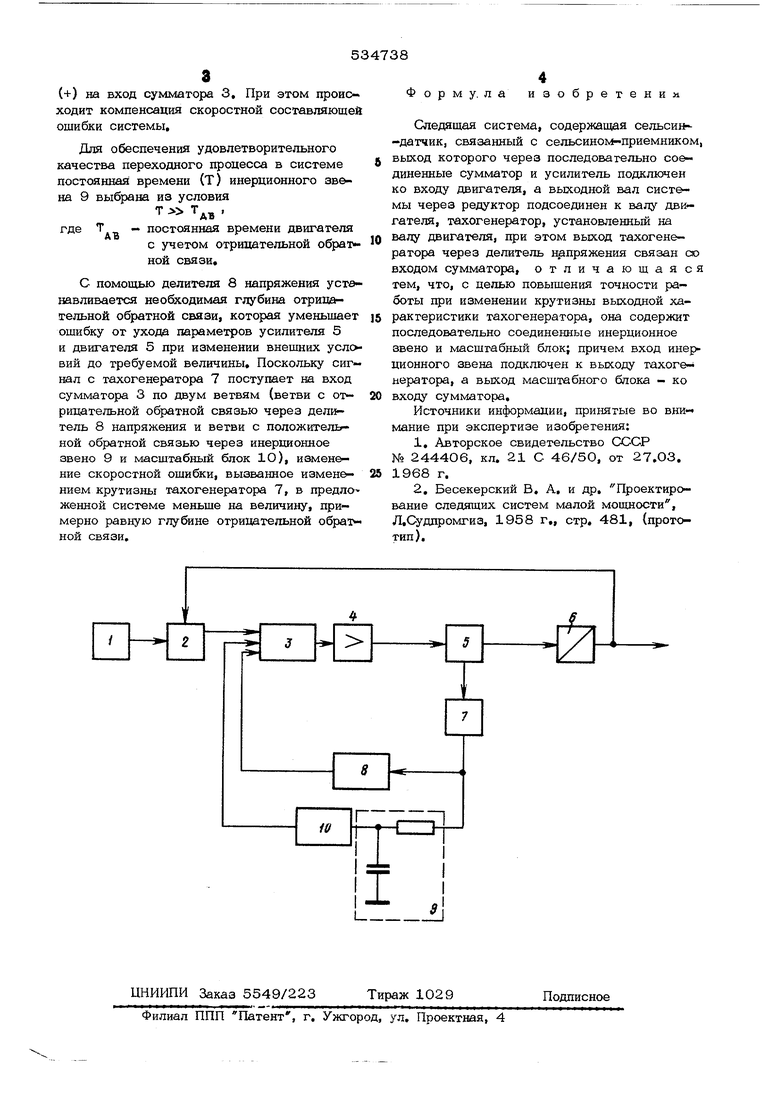
(54) СЛЕДЯЩАЯ СИСТЕМА (+) на вход сумматора 3, При этом происходит компенсация скоростной составляющей ошибки системы. Для обеспечения удовлетворительного качества переходного процесса в системе постоянная времени (Т) инерционного зв&на 9 выбрана из условия Т Т, Т - постоянная времени двигателя с учетом отрицательной обратНОИ связи, С помощью делителя 8 напряжения устанавливается необходимая глубина отрицательной обратной связи, которая уменьщает ошибку от ухода параметров усилителя 5 и двигателя 5 при изменении внешних условий до требуемой величины. Поскольку сиг- ийл с тахогенератора 7 поступает на вход сумматора 3 по двум ветвям (ветви с от рицательной обратной связью через делитель 8 напряжения и ветви с положительной обратной связью через инерционное звено 9 и масштабный блок 1О), изменение скоростной ошибки, вызванное изменинием крутизны тахогенератора 7, в предло женной системе меньше на величину, примерно равную глубине отрицательной обратной связи. Форму, ла иаобретенил Следящая система, содержащая сельси -датчик, связанный с сельсино1.приемником, выход которого через последовательно соединенные сумматор и усилитель подключен ко входу двигателя, а выходной вал системы через редуктор подсоединен к валу двигателя, тахогенератор, установленный на двигателя, при этом выход тахогене делитель 1шпряжения связан ао входом сумматора, отличающаяся тем, что, с целью повыщения точности работы при изменении крутизны выходной харакгеристики тахогенератора, она содержит последовательно соединенные инерционное звено и масштабный блок; причем вход инерционного звена подключен к выходу тахоге- аератора, а выход масштабного блока - ко входу сумматора, Источники информации, принятые во вни- мание при экспертизе изобретения: 1, Авторское свидетельство СССР № 2444О6, кл. 21 С 46/50, от 27,ОЗ, 1968 г, 2, Бесекерский В, А, и др. Проектирование следящих систем малой мощности, Л,Судпромгиз, 1958 г,, стр, 481, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1401436A2 |
| Следящая система | 1977 |
|
SU703776A1 |
| Следящая система комбинированного управления | 1980 |
|
SU881655A1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| Следящий привод | 1982 |
|
SU1049864A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Следящая система | 1980 |
|
SU883861A1 |
| Нелинейное корректирующее устройство | 1982 |
|
SU1023275A1 |
| Двухдвигательная следящая система | 1980 |
|
SU901992A1 |
| Следящая система | 1979 |
|
SU809042A1 |
