c: :;:iD
Л7
1в
4 О ГО
00
00
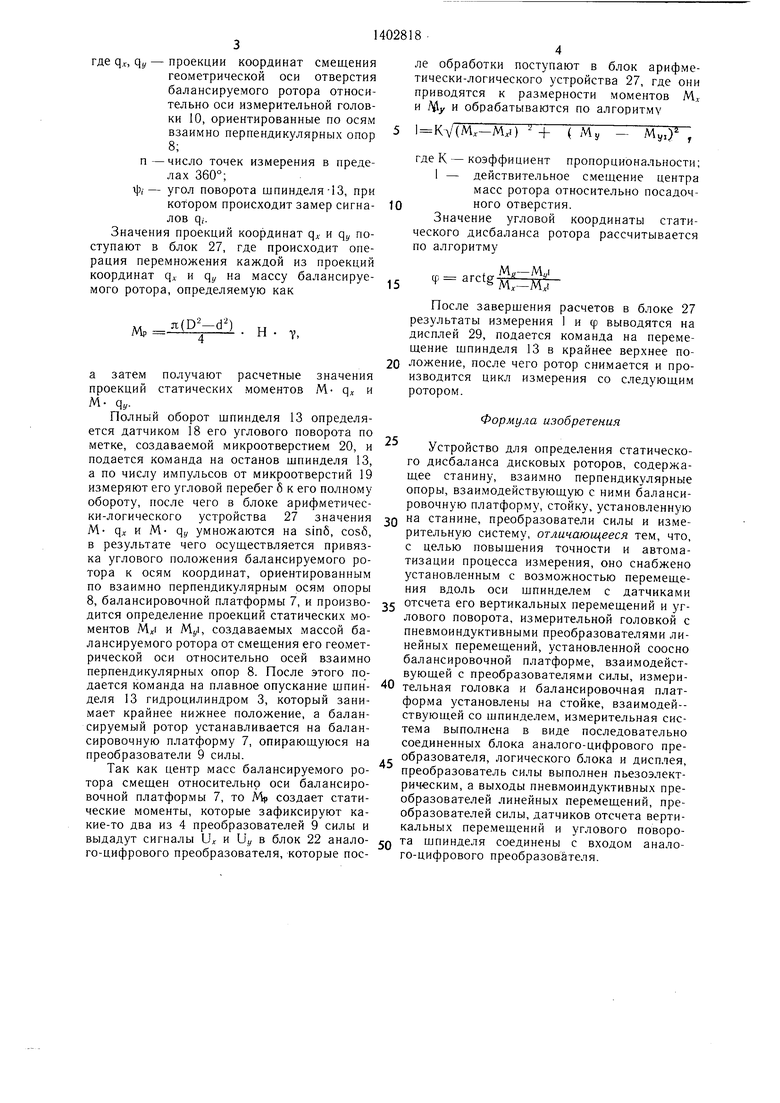
ренний диаметры D и d балансируемого ротора, его высота Н и плотность материала Y). задатчик 25 вертикального перемещения шпинделя с балансируемым .ро- г тором задатчик 26 дискретности считывания сигналов углового поворота шпинделя с балансируемым ротором, арифметически- логический блок 27, производящий обработку сигналов, поступающих в него, и выдачу команд исполнительным механизмам счетного блока 28, служащего для приема информации от датчика 15 отсчета вертикальных перемещений шпинделя 13, и дисплей 29, служащий для индикации результатов балансировки ротора.
Устройство работает следующим образом. По команде из измерительной системы шпиндель 13 выталкивается гидроцилиндром 3 в крайнее верхнее положение и балансируемый ротор устанавливается манипулятором на шпиндель 13, после чего подается
10
Изобретение относится к балансировочной технике и предназначено для определения статического дисбаланса дисковых роторов с центральным отверстием, например, шлифовальных кругов.
Целью изобретения является повышение точности и автоматизации процесса измерения дисбаланса за счет бесконтактного измерения положения балансируемого ротора относительно оси шпинделя и использо- ; вания измерительной системы.
; На фиг. 1 изображено устройство для
; определения статического дисбаланса дисковых роторов, общий вид; на фиг. 2 - блок- схема измерительной системы; на фиг. 3 - схема определения статического дисбаланса дисковых роторов.
Устройство для определения статического
дисбаланса дисковых роторов содержит ста- : нину 1, на которой установлена жесткая ; стойка 2, в полости котор.ой установлен
гидроцилиндр 3, двигатель 4 с удлиненной 20команда на его опускание, в процессе ко шестерней 5. Соосно стойке 2 установленторого перемещается жестко связанная с
: механизм 6, состоящий из балансировоч-ним планка 16 с микроотверстиями 17,
ной платформы 7, установленной на взаим-прохождение которых фиксируется датчиком
но перпендикулярных опорах 8, выполненных15 отсчета вертикальных перемещений
в виде карданового подвеса, несущих балан- -шпинделя так, что на входе из него через
: сируемый дисковый ротор, опирающийся -
на четыре ортогонально установленных пьезоэлектрических преобразователя 9 силы,
измерительную головку 10 по центрирую- : щему пояску 11, содержащую два установленных диаметрально противоположно и со- -JQперемещению шпинделя 13 с балансируе- осно балансировочной платформе 7 пневмо-мым ротором таким образом, что середина индуктивных преобразователея 12 линейныхвысоты (Н/2) балансируемого ротора сов- перемещений,местится с плоскостью сопел пневмоиндукНа стойке 2 соосно ей установлен щпин-тивных преобразователей 12 линейных пере- дель 13, опирающийся на подшипниковыймещений, подается команда на его оста- узел 14 с возможностью вращения от дви-35 ° выдвижение штоков с соплами гателя 5 через шестерню бис возмож-нневмоиндуктивных преобразователей 12 ностью перемещения вдоль оси, которыйлинейных перемещений, которые создают из- фиксируется датчиком 15 отсчета его вер-мерительный зазор относительно внутренне- тикальных перемещений от гидроцилиндра 3го отверстия балансируемого ротора. Изме- по командам из измерительной системы. Нарительная система включает вращение шпин- невращающейся опорной части шпинделя деля 13 с балансируемым ротором и по переустановлены планка 16 с м.икроотверстия-мещениям штоков пневмоиндуктивных пре- ми 17, взаимодействующая с датчиком 15 отсчета вертикальных перемещений шпинделя, и оптический датчик 18 углового поворота шпинделя 13, взаимодействующий,r го ротора, определяющего его геометри- с равномерно расположенными по окружное-ческую ось, относительно измерительной го- ти микроотверстиями 19 и смещенным по радиусу относительно последних микроот- верстиеМ 20, выполненных в диске 21, который установлен соосно шпинделю 13.
Выходы пневмоиндуктивных преобразо-50 шпинделя 13, зависящий от шага межвателей линейных перемещений, преобразо-ДУ микроотверстиями 19, фиксируемого датвателей силы, датчиков отсчета вертикаль-чиком 18 его углового поворота. Сигналы
ных перемещений и углового поворота шпин-Ч; поступают в блок 22 аналого-цифроводеля соединены с входом блока 22 ана-го преобразователя и далее в арифметилого-цифрового преобразователя измерительчески-логический блок 27, где обрабатываютной системы, которая содержит логичес-55 ся по алгоритму кий блок 23, содержащий блок задатчикаждые 0,5 мм перемещения шпинделя 13 формируется импульсный сигнал, подаваемый в счетный блок 28.
После отработки числа импульсов, установленных на задатчике 25, соответствующих
образователей 12 .тинейных перемешений получают сигналы q,-, пропорциональные смещению внутреннего отверстия балансируе.моловки 10, определяющей ось вращения шпинделя 13 и остальных элементов устройства, связанных с ним, которые фиксируют через определенный угол повороков и задатчик 24 типооазмеров баланси-о
о -.Zj Q COS ib Q - / п
руемых роторов (задаются наружный и внут- - к п
sin -ф;.
ренний диаметры D и d балансируемого ротора, его высота Н и плотность материала Y). задатчик 25 вертикального перемещения шпинделя с балансируемым .ро- г тором задатчик 26 дискретности считывания сигналов углового поворота шпинделя с балансируемым ротором, арифметически- логический блок 27, производящий обработку сигналов, поступающих в него, и выдачу команд исполнительным механизмам счетного блока 28, служащего для приема информации от датчика 15 отсчета вертикальных перемещений шпинделя 13, и дисплей 29, служащий для индикации результатов балансировки ротора.
Устройство работает следующим образом. По команде из измерительной системы шпиндель 13 выталкивается гидроцилиндром 3 в крайнее верхнее положение и балансируемый ротор устанавливается манипулятором на шпиндель 13, после чего подается
0
шпинделя так, что на входе из него через
-
каждые 0,5 мм перемещения шпинделя 13 формируется импульсный сигнал, подаваемый в счетный блок 28.
После отработки числа импульсов, установленных на задатчике 25, соответствующих
тивных преобразователей 12 линейных пере- мещений, подается команда на его оста- ° выдвижение штоков с соплами нневмоиндуктивных преобразователей 12 линейных перемещений, которые создают из- мерительный зазор относительно внутренне- го отверстия балансируемого ротора. Изме- рительная система включает вращение шпин- деля 13 с балансируемым ротором и по перемещениям штоков пневмоиндуктивных пре- го ротора, определяющего его геометри- ческую ось, относительно измерительной го-
образователей 12 .тинейных перемешений получают сигналы q,-, пропорциональные смещению внутреннего отверстия балансируе.мотивных преобразователей 12 линейных пере- мещений, подается команда на его оста- ° выдвижение штоков с соплами нневмоиндуктивных преобразователей 12 линейных перемещений, которые создают из- мерительный зазор относительно внутренне- го отверстия балансируемого ротора. Изме- рительная система включает вращение шпин- деля 13 с балансируемым ротором и по перемещениям штоков пневмоиндуктивных пре- го ротора, определяющего его геометри- ческую ось, относительно измерительной го-
ловки 10, определяющей ось вращения шпинделя 13 и остальных элементов устройства, связанных с ним, которые фиксируют через определенный угол поворо
sin -ф;.
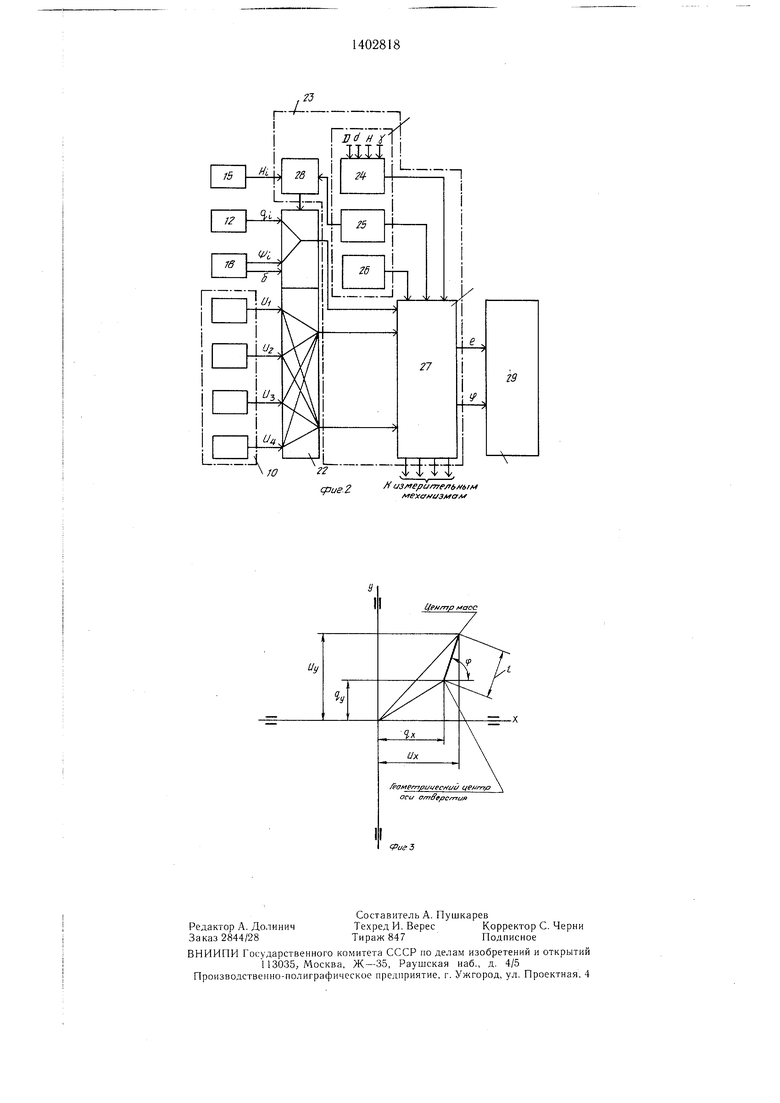
проекции координат смещения геометрической оси отверстия балансируемого ротора относительно оси измерительной головки 10, ориентированные по осям взаимно перпендикулярных опор
ле обработки поступают в блок арифметически-логического устройства 27, где они приводятся к размерности моментов М,, и и обрабатываются по алгоритму
1 KV(M.-M.I) + (My - My,) ,
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2017 |
|
RU2674423C2 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Балансировочный станок | 1983 |
|
SU1144015A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ЭЛЕМЕНТОВ ДЕТАЛЕЙ МАШИН | 1993 |
|
RU2039957C1 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2456566C1 |
| Способ измерения дисбаланса ротора и устройство для его осуществления | 1976 |
|
SU605139A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1095042A2 |
Изобретение относится к балансировочной технике и предназначено для определения статических дисбалансов дисковых роторов с центральным отверстием, например, шлифовальных кругов. Целью изобретения является повышение точности и автоматизации процесса измерения дисбаланса за счет бесконтактного измерения положеНИН балансируемого ротора относительно оси шпинделя и использования измерительной системы. Устройство содержит стойку 2 с гидроцилиндром 3, которая определяет геометрическую ось балансировочной платформы 7, измерительной головки 10 и шпинделя 13. Отклонение геометрической оси балансируемого ротора определяется пневмо- индуктивными преобразователями 12 линейных перемещений с привязкой в угловом положении относительно нулевой метки шпинделя 13 до установки на балансировочную платформу 7. Все перемещения ротора, его силовое воздействие на балансировочную платформу 7 измеряются соответствующими датчиками, сигналы от которых поступают в измерительную систему, которая производит расчет по алгоритмам и выдает команды на работу устройства по проведению измерений в определенной последовательности. Результаты расчета выводятся на дисплей. 3 ил. i (Л
n-число точек измерения в пределах 360°; %- угол поворота шпинделя-13, при
котором происходит замер сигна- ЛОБ q/.
Значения проекций координат qx и qy поступают в блок 27, где происходит операция перемножения каждой из проекций координат qi и q,/ на массу балансируе- мого ротора, определяемую как
Мр
4
Н . т.
а затем получают расчетные значения проекций статических моментов М- q и М- qy.
Полный оборот шпинделя 13 определяется датчиком 18 его углового поворота по метке, создаваемой микроотверстием 20, и подается команда на останов шпинделя 13, а по числу импульсов от микроотверстий 19 измеряют его угловой перебег б к его полному обороту, после чего в блоке арифметичес25
После завершения расчетов в блоке 27 результаты измерения 1 и ф выводятся на дисплей 29, подается команда на перемещение щпинделя 13 в крайнее верхнее положение, после чего ротор снимается и производится цикл измерения со следующим ротором.
Формула изобретения
Устройство для определения статического дисбаланса дисковых роторов, содержащее станину, взаимно перпендикулярные опоры, взаимодействующую с ними балансировочную платформу, стойку, установленную
ки-логического устройства 27 значения 0 станине, преобразователи силы и изме- М- qx и М- q,, умножаются на sin6, cos6, в результате чего осуществляется привязка углового положения балансируемого ротора к осям координат, ориентированным по взаимно перпендикулярным осям опоры
рительную систему, отличающееся тем, что, с целью повышения точности и автоматизации процесса измерения, оно снабжено установленным с возможностью перемещения вдоль оси шпинделем с датчиками
8, балансировочной платформы 7, и произво- 5 отсчета его вертикальных перемещений и уг- дится определение проекций статических мо- лового поворота, измерительной головкой с ментов Mxi и Myi, создаваемых массой ба- пневмоиндуктивными преобразователями ли- лансируемого ротора от смещения его геомет- нейных перемещений, установленной соосно рической оси относительно осей взаимно балансировочной платформе, взаимодейст- перпендикулярных опор 8. После этого по-вующей с преобразователями силы, измеридается команда на плавное опускание шпин- 40 тельная головка и балансировочная плат- деля 13 гидроцилиндром 3, который зани- форма установлены на стойке, взаимодей-- мает крайнее нижнее положение, а балансируемый ротор устанавливается на балансировочную платформу 7, опирающуюся на преобразователи 9 силы.
Так как центр масс балансируемого ротора смещен относительно оси балансиро45
вочной платформы 7, то Мр создает статические моменты, которые зафиксируют какие-то два из 4 преобразователей 9 силы и
ствующеи со шпинделем, измерительная система выполнена в виде последовательно соединенных блока аналого-цифрового преобразователя, логического блока и дисплея, преобразователь силы выполнен пьезоэлектрическим, а выходы пневмоиндуктивных преобразователей линейных перемещений, преобразователей силы, датчиков отсчета вертикальных перемещений и углового поворовыдадут сигналы U и Uy в блок 22 анало- JQ та щпинделя соединены с входом аналого-цифрового преобразователя, которые пос- го-цифрового преобразователя.
где К - коэффициент пропорциональности; I - действительное смещение центра масс ротора относительно посадочного отверстия.
Значение угловой координаты статического дисбаланса ротора рассчитывается по алгоритму
,„ rrtp- Ф - arctg M)vi;,
После завершения расчетов в блоке 27 результаты измерения 1 и ф выводятся на дисплей 29, подается команда на перемещение щпинделя 13 в крайнее верхнее положение, после чего ротор снимается и производится цикл измерения со следующим ротором.
Формула изобретения
Устройство для определения статического дисбаланса дисковых роторов, содержащее станину, взаимно перпендикулярные опоры, взаимодействующую с ними балансировочную платформу, стойку, установленную
станине, преобразователи силы и изме-
станине, преобразователи силы и изме-
рительную систему, отличающееся тем, что, с целью повышения точности и автоматизации процесса измерения, оно снабжено установленным с возможностью перемещения вдоль оси шпинделем с датчиками
40 тельная головка и балансировочная плат- форма установлены на стойке, взаимодей--
45
ствующеи со шпинделем, измерительная система выполнена в виде последовательно соединенных блока аналого-цифрового преобразователя, логического блока и дисплея, преобразователь силы выполнен пьезоэлектрическим, а выходы пневмоиндуктивных преобразователей линейных перемещений, преобразователей силы, датчиков отсчета вертикальных перемещений и углового повороJQ та щпинделя соединены с входом анало го-цифрового преобразователя.
Vd H rfl 1
Ф I
i III
q::ue-Z
v
ff U3f fpurr7e/ etffi in f exoffua/ita t
масс
| Способ окраски кож | 1941 |
|
SU63220A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
