.4; О 4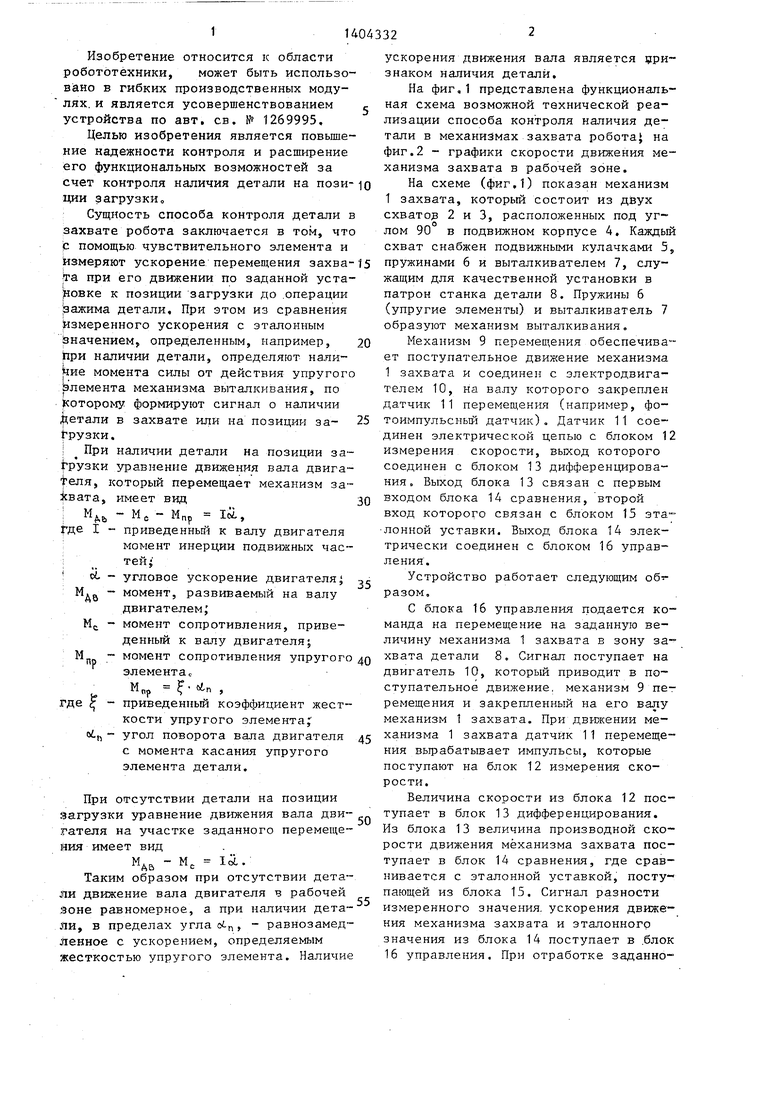
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля наличия детали в механизмах захвата робота | 1985 |
|
SU1269995A1 |
| Способ контроля зажима детали в патроне станка с помощью робота | 1986 |
|
SU1342731A1 |
| Устройство для контроля подачи листовой заготовки | 1990 |
|
SU1756148A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Способ управления манипулятором промышленного робота | 1991 |
|
SU1815209A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1989 |
|
SU1743654A1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ СХВАТА МАНИПУЛЯТОРА | 2004 |
|
RU2288092C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
Изобретение относится к области робототехники, в частности к контролю наличия детали в захватах роботов, и может быть использовано при с.озда- нии гибких производственных модулей. Целью изобретения является повышение надежности контроля детали в механизме захвата робота и расширение функциональных возможностей способа за счет контроля наличия детали на позиции загрузки. Контроль наличия детали основывается на различии динамики движения механизма захвата при заданном перемещении до позиции загрузки за счет изменения структуры дифференциального уравнения механизма захвата в момент касания механизма выталкивания захвата детали, вызванного-наличием или отсутствием момента силы от действия упругого элемента выталкивания механизма захвата. Наличие момента силы определяют с помощью измерения ускорения движения захвата к позиции загрузки до операции зажима; детали. Из сравнения измеренного ускорения с зталонным делают вывод о наличии или отсутствии детали в захвате или на позиции загрузки. 2 ил. е S (Л
1Ч
Изобретение относится к области робототехники, может быть использовано в гибких производственных модулях, и является усовершенствованием устройства по авт. св. № 1269995.
Целью изобретения является повышение надежности контроля и расш}фение его функциональных возможностей за счет контроля наличия детали на пози- ции загрузки о
Сущность способа контроля детали в захвате робота заключается в том, что с помощью чувствительного элемента и измеряют ускорение перемещения захва;Та при его движении по заданной уста- уютаке к позиции загрузки до .операции (зажима детали. При этом из сравнения Измеренного ускорения с эталонным |значением, определенным, например, три наличии детали, определяют нали- |чие момента силы от действия упругого Ьлемента механизма выталкивания, по Которому формируют сигнал о наличии Детали в захвате или на позиции за-
РУЗКИ.
j При наличии детали на позиции за- рузки зфавнение движения вала двига- еля, который перемещает механизм за- вата, имеет вид
; М;, - м, - Мпр IU,
где I - приведенньй к валу двигателя : момент инерции подвижных час- тей
d угловое ускорение двигателя Мдц момент, развиваемый на валу
двигателем;
MC - момент сопротивления, приведенный к валу двигателяJ
пр
М„.. момент сопротивления упругого
элемента,, М
пр
А. ,
с -т
где - приведенный коэффициент жесткости упругого элемента; oi.,, угол поворота вала двигателя с момента касания упругого элемента детали.
При отсутствии детали на позиции Загрузки зфавнение движения вала дви- гателя на участке заданного перемещения имеет вид
М
АЬ
- М loL.
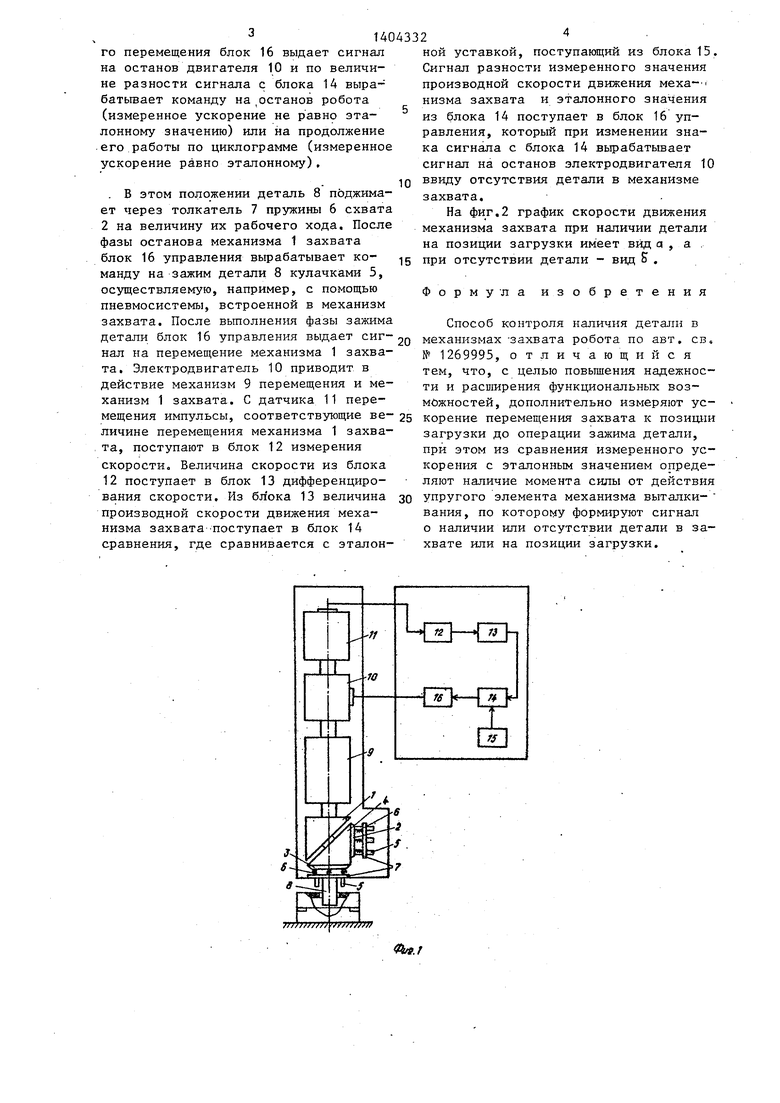
Таким образом при отсутствии детали движение вала двигателя в рабочей зоне равномерное, а при наличии детали, в пределах угла ci,,, - равнозамед- Ленное с ускорением, определяемым жесткостью упругого элемента. Наличие
5 0 5
0
5
о
5
5
ускорения движения вала является 9ри знаком наличия детали.
На фиг,1 представлена функциональная схема возможной технической реализации способа контроля наличия детали в механизмах захвата робота на фиг.2 - графики скорости движения механизма захвата в рабочей зоне.
На схеме (фиг.1) показан механизм 1 захвата, который состоит из двух схватов 2 и 3, расположенных под углом 90 в подвижном корпусе 4. Каждый схват снабжен подвижными кулачками 5, пружинами 6 и выталкивателем 7, служащим для качественной установки в патрон станка детали 8. Пружины б (упругие элементы) и выталкиватель 7 образуют механизм выталкивания.
Механизм 9 перемещения обеспечивает поступательное движение механизма 1 захвата и соединен с электродвигателем 10, на валу которого закреплен датчик 11 перемещения (например, фотоимпульсный датчик), Датчик 11 соединен электрической цепью с блоком 12 измерения скорости, выход которого соединен с блоком 13 дифференцирования. Выход блока 13 связан с первым входом блока 14 сравнения, второй вход которого связан с блоком 15 эта- лонной уставки. Выход блока 14 электрически соединен с блоком 16 управления.
Устройство работает следующим разом,
С блока 16 управления подается команда на перемещение на заданную величину механизма 1 захвата в зону захвата детали 8. Сигнал поступает на двигатель 10, который приводит в поступательное движение, механизм 9 перемещения и закрепленный на его валу механизм 1 захвата. При двгокении механизма 1 захвата датчик 11 перемещения вьфабатывает импульсы, которые поступают на блок 12 измерения скорости.
Величина скорости из блока 12 поступает в блок 13 дифференцирования. Из блока 13 величина производной скорости движения механизма захвата поступает в блок 14 сравнения, где сравнивается с эталонной уставкой, поступающей из блока 15. Сигнал разности измеренного значения, ускорения движения механизма захвата и эталонного значения из блока 14 поступает в .блок 16 управления. При отработке заданного перемещения блок 16 выдает сигнал на останов двигателя 10 и по величине разности сигнала с блока 14 выра- батьгоает команду на останов робота (измеренное ускорение не равно эталонному значению) или на продолжение его работы по циклограмме (измеренное ускорение равно эталонному).
. В этом положении деталь 8 поджимает через толкатель 7 пружины 6 схвата 2 на величину их рабочего хода. После фазы останова механизма 1 захвата блок 16 управления вырабатывает ко- манду на зажим детали 8 кулачками 5, осуществляемую, например, с помощью пневмосистемы, встроенной в механизм захвата. После вьшолнения фазы зажима детали блок 16 управления выдает сиг- нал на перемещение механизма 1 захвата. Электродвигатель 10 приводит в действие механизм 9 перемещения и механизм 1 захвата, С датчика 11 перемещения импульсы, соответствующие ве- личине перемещения механизма 1 захвата, поступают в блок 12 измерения скорости. Величина скорости из блока 12 поступает в блок 13 дифференцирования скорости. Из бл ока 13 величина производной скорости движения механизма захвата-поступает в блок 14 сравнения, где сравнивается с эталон0
g Q 5 о
ной уставкой, поступающий из блока 15, Сигнал разности измеренного значения производной скорости движения меха- низма захвата и эталонного значения из блока 14 поступает в блок 16 управления, который при изменении знака сигнала с блока 14 вырабатывает сигнал на останов электродвигателя 10 ввиду отсутствия детали в механизме захвата.
На фиг.2 график скорости движения механизма захвата при наличии детали на позиции загрузки имеет ввд а , а . при отсутствии детали - вид S.
Формула изобретения
Способ контроля наличия детали в механизмах -захвата робота по авт, св. № 1269995, отличающийся тем, что, с целью повьшения надежности и расширения функциональных возможностей, дополнительно измеряют ускорение перемещения захвата к позиции загрузки до операции зажима детали, при этом из сравнения измеренного ускорения с эталонньм значением определяют наличие момента силы от действия упругого элемента механизма выталки- вания, по которому формируют сигнал о наличии или отсутствии детали в захвате или на позиции загрузки.
Фиг. 2
| Способ контроля наличия детали в механизмах захвата робота | 1985 |
|
SU1269995A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
