(21)4053539/29-27
(22)10.03.86 (46) 30.06.88. Бюл. № 24
(71)Новосинеглазовский комбинат строительных конструкций
(72)И.А.Мелкозеров и П.Г.Богуславский
(53)621.777.64(088.8)
(56)Авторское свидетельство СССР № 1306619, кл. В 21 D 7702, J985.
(54)РОЛЬГАНГ ТРУБОГИБОЧНОЙ МАШИНЫ
(57)Изобретение относится к трубоги- бочному производству и может быть использовано при гибке труб большого диаметра на предприятиях и в полевых условиях, при строительстве магистральных трубопроводов. Цель изобретения - повышение надежности работы. Рольганг трубогибочной машины содержит установленные на стойках направляющие, каретку с размещенным ниже уровня направляющих для захвата. Захват в виде эксцентричных секторов установлен на рычажном механизме типа двукратного параллелограмма. Шар- риры, связывающие каретку с рычажным механизмом, размещены выше опорного башмака трубогибочной машины. При гибке верхний конец- трубы поднимается. Вслед за ним поднимается захват, вызывая отклонение тяг рычажного механизма от упора. Затем включают привод каретки, и она пр1}лоднимает и выдвигает трубку из трубогибочной машины, надежно удерживая ее захватом, 4 ил.
i
СЛ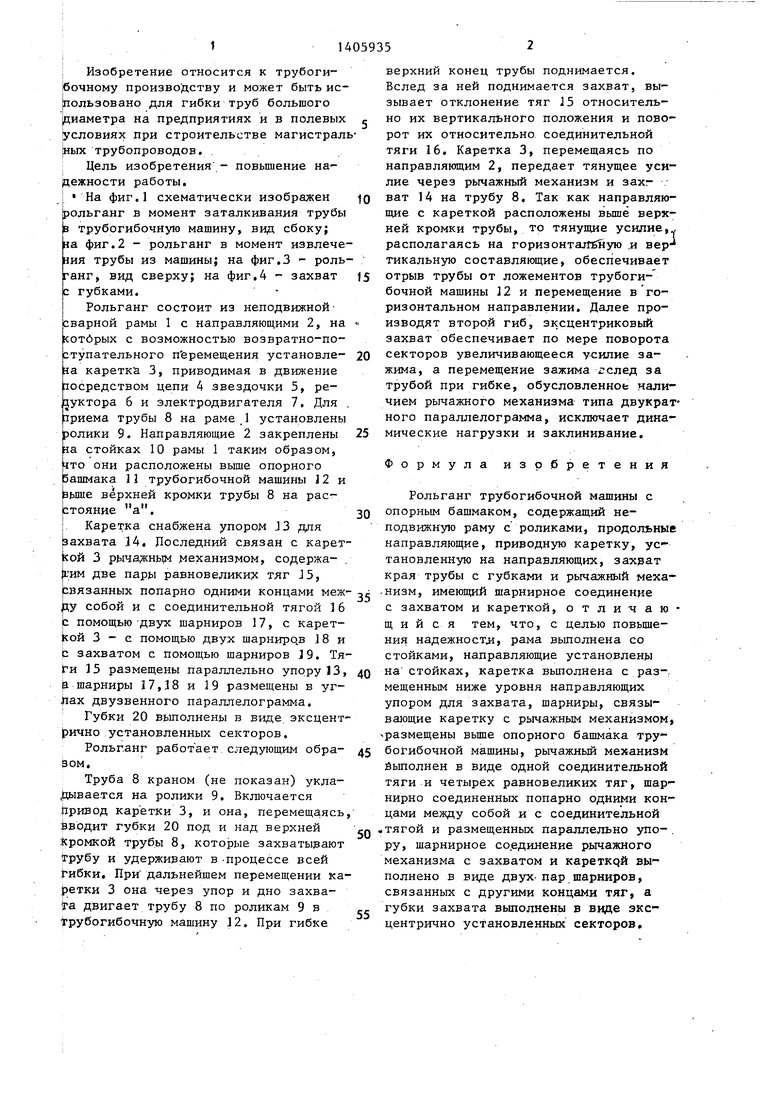
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство к трубогибочному станку | 1978 |
|
SU747572A1 |
| Устройство для подачи заготовок в трубогибочную машину | 1987 |
|
SU1433589A1 |
| Станок для холодной гибки труб | 1985 |
|
SU1306619A1 |
| Головка гибочная трубогибочного станка | 1978 |
|
SU772648A1 |
| Трубогибочная машина | 1990 |
|
SU1764738A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
| Трубогибочный станок | 1952 |
|
SU97455A1 |
| Устройство для перегрузки цилиндрических грузов | 1979 |
|
SU867792A1 |
4ib О СЛ
СО СЛ
Изобретение относится к трубоги- |бочному производству и может быть ис- пользовано для гибки труб большого диаметра на предприятиях и в полевых Условиях при строительстве магистраль JHbix трубопроводов, .
Цель изобретения - повышение надежности работы.
I «На фиг.1 схематически изображен рольганг в момент заталкивания трубы в трубогибочную машину, вид сбоку; яа фиг.2 - рольганг в момент извлечения трубы из машины; на фиг.З - рольганг, вид сверху; на фиг,4 - захват с губками.
Рольганг состоит из неподвижной сварной рамы 1 с направляющими 2, на котбрых с возможностью возвратно-поступательного перемещения установле- яа каретка 3, приводимая в движение :1осредством цепи 4 звездочки 5, редуктора 6 и электродвигателя 7, Для . 1риема трубы 8 на раме . 1 установлены ролики 9, Направляющие 2 закреплены яа стойках 10 рамы 1 таким образом, «то они расположены выше опорного Зашмака 11 трубогибочной машины 12 и 3t,me верхней кромки трубы 8 на расстояние а,
Каретка снабжена упором J3 для захвата J4, Последний связан с кареткой 3 р 1Ча;жнь м механизмом, содержащим две пары равновелики тяг J5, связанных попарно одними концами меж- ду собой и с соединительной тягой 16 с помощью двух шарниров 17, с карет- хой 3-е помощью двух шарниро в 18 и t захватом с помощью шарниров J9, Тя- |ги 15 размещены параллельно упору 13, & шарниры 17,38 и 19 размещены в уг- .1ах двузвенного параллелограмма,
Губки 20 вьшолнены в виде, эксцент- |рично установленных секторов.
Рольганг работает следующим обра- ром.
Труба 8 краном (не показан) укла- ,р;ывается на ролики 9, Включается Ьривод каретки 3, и она, перемещаясь :&водит губки 20 под и над верхней Кромкой трубы 8, захватыэают |грубу и удерживают в .процессе всей ; ибки. При дальнейшем перемещении каретки 3 она через упор и дно захва- |га двигает трубу 8 по роликам 9 з Трубогибочную машину J2, При гибке
д 5
0 5 0
с 0
j
,.
5
верхний конец трубы поднимается. Вслед за ней поднимается захват, вызывает отклонение тяг 15 относительно их вертикального положения и поворот их относительно соединительной тяги 16, Каретка 3, перемещаясь по направляющим 2, передает тянущее усилие через рычажный механизм и захг / ват 14 на трубу 8, Так как направляющие с кареткой расположены Bbmie верхней кромки трубы, то тянущие усилие, располагаясь на горизонтальную .и вер- тикальную составляющие, обеспечивает отрыв трубы от ложементов трубогибочной машины 12 и перемещение в горизонтальном направлении. Далее производят второй гиб, зксцентриковый захват обеспечивает по мере поворота секторов увеличивающееся усилие зажима, а перемещение зажима гслед за трубой при гибке, обусловленное наличием рычажного механизма типа двукратного параллелограмма, исклют1ает динамические нагрузки и заклинивание.
Формула изобретения
Рольганг трубогибочной машины с опорным башмаком, содержащий неподвижную раму с роликами, продольные направляющие, приводную каретку, установленную на направляющих, захват края трубы с губками и рычажный меха.низм, имеющий шарнирное соединение с захватом и кареткой, отличающий с я тем, что, с целью повьш1е- ния надежности, рама вьшолнена со стойками, направляющие установлены на стойках, каретка вьшолнена с раз-, мещенным ниже уровня направляющих упором для захвата, шарниры, связывающие каретку с рычажн{ 1м механизмом
paзмeщeны вьш1е опорного башмака трубогибочной машины, рьшажньш механизм йыполнен в виде одной соединительной тяги и четырех равновеликих тяг, шар- нирно соединенных попарно одними концами между собой и с соединительной
«тягой и размещенных параллельно упо-. ру, шарнирное соединение рычажного механизма с захватом и кареткдй выполнено в виде двух-пар шарниров, связанных с другими концами тяг, а губки захвата вьтолнены в виде эксцентрично установленных секторов.
