В
.«авгл
KSS
KS
f6
лец 13. Валик 12 охватывает подпружиненная втулка 15 с захватом 16. Втулки 15 выполнены со спиральным пазом 18, взаимодействующим с пальцем 13. Конвейер закреплен оргажде- нием. Стойка конвейера оснащена перегрузочным механизмом в виде тележки с захватами для контейнеров.Захваты выполнены в виде установленных вдоль оси конвейера в противоположные стороны смещенные по высоте вилки с датчиками наличия контейнеров.Тележка имеет консоль с роликом на конце. Тележка с контейнером перемещается, вверх по стойке до срабатывания датчика, после чего она останавливается. Подвеска с захватом 16 снимает контейнер. Под действием массы контейнера втулка 15, сжимая пружину 14, опускается вниз и разворачивается на 180 относительно оси симметрии валика 12. Палец 13 скользит по пазу 18 и контейнер перемещается по пути конвейера. 1 з.п. ф-лы, 7 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер | 1990 |
|
SU1728091A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| ПОДВЕСКА ПОДВЕСНОГО ТОЛКАЮЩЕГО КОНВЕЙЕРА ДЛЯ КУЗОВА АВТОМОБИЛЯ | 2003 |
|
RU2253603C1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для перегрузкипОдВЕСОК | 1979 |
|
SU810585A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для перегрузки изделий с подвесного грузонесущего конвейера | 1975 |
|
SU655610A1 |
| Автоматическая линия для транспортировки полуфабрикатов | 1973 |
|
SU653186A1 |
| Перегрузочное устройство | 1976 |
|
SU619413A1 |
| Подвесной конвейер | 1977 |
|
SU763211A1 |
Изобретение относится к подъемно-транспортному машиностроению и м.б. использовано для транспортирования и перемещения штучных грузов. Цель - обеспечение автоматической загрузки - разгрузки подвесок конвейера.. На стойках конвейера закреплены ходовые пути, по которым тяговым органом перемещаются каретки с подвесками для контейнеров. На корпусе подвески жестко закреплен одним концом ступенчатый валик 12, на другом конце которого жестко закреплен па
1
Изобретение относится к подъемно- транспортному машиностроению и мо- жет быть использовано для транспортирования и перемещения штучных грузов.
Цель изобретения - обеспечение автоматической загрузки-разгрузки подвесок конвейера.
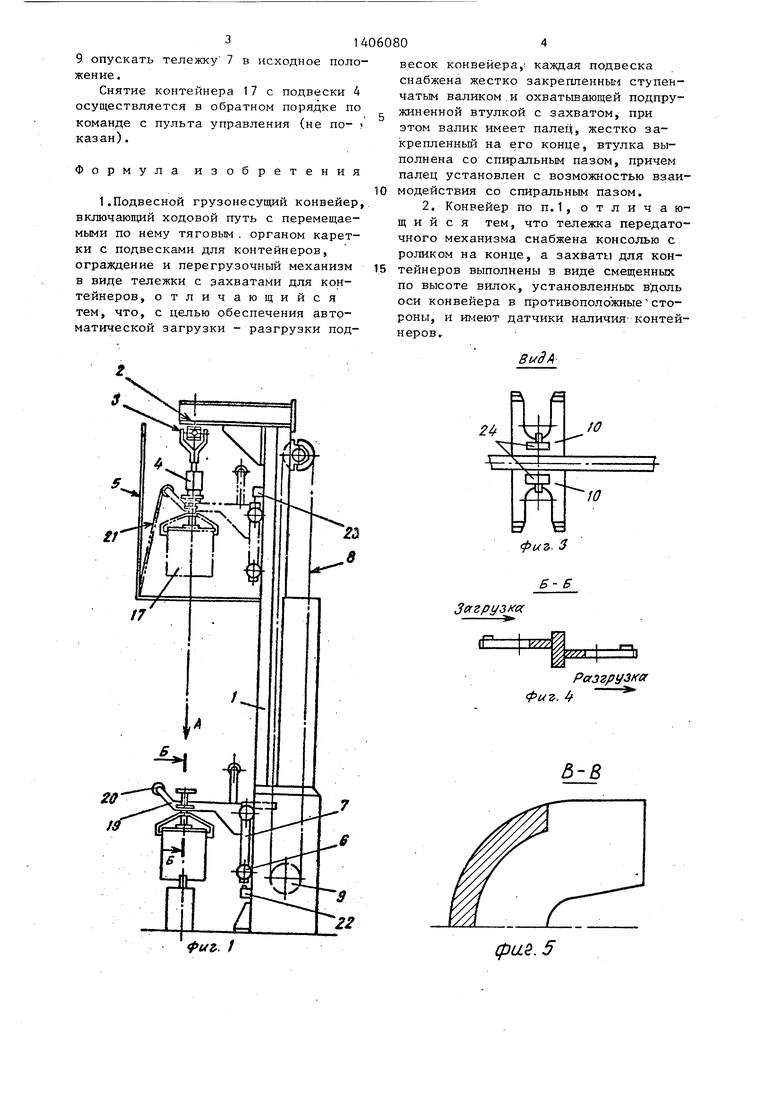
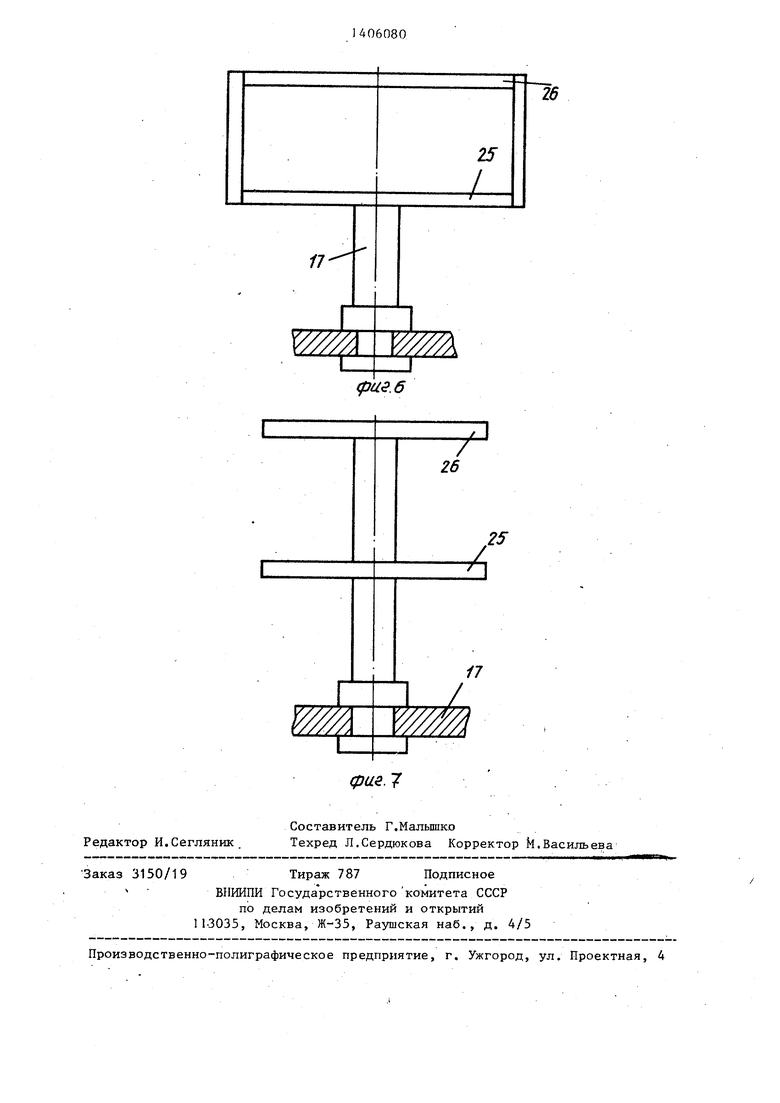
На фиг. 1 показан общий вид кон- вейера; на фиг. 2 - подвеска конвейера; на фиг. 3 - вид А на фиг.1; на фиг, 4 - разрез.Б-Б на фиг.1; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - верхняя часть контейнера; на фиг. 7 - то же, вариант.
Подвесной конвейер состоит из сто- ек 1 с закрепленным на них ходовым путем 2, по которому тяговым органом перемещаются каретки 3 с подвесками 4. Конвейер закреплен ограждением 5 трассы. Стойка 1 в местах проведения технологических операций выполнена как направляющая и оснащена перегрузочным механизмом в виде перемещаемой на роликах 6 тележки 7, связанной цепью 8 с приводом 9. Тележка 7 оснащена захватными вилками 10, которые смещены по высоте и направлены в противоположные стороны вдоль трассы конвейера. Подвеска 4 выполнена с корпусом 11, в котором жестко закреплен одним концом ступенчатый валик 12; на другом конце которого перпендикулярно его оси закреплен палец 13,. Валик 12 охватывает подпружиненная пружиной 14 втулка 15 с захватом 16 для навешивания контейнеров 17. Втулка. 15 выполнена со спиралевидным пазом 18, в котором установлен с возможностью взаимодействия палец 13. Тележка 7 снабжена консолью 19 с роликом 20 для открывания крьшки 21 ограждения 5. Контроль крайних положений тележки 7 осуществляется датчиками 22 и 23, а контроль загрузки захвата 16 контейнером 17 контролируется датчиками 24.
Контейнер 17 для обеспечения манипулирования выполнен с поперечными опорами: нижней 25 и верхней 26.
Подвесной конвейер работает следующим образом.
В исходном положении на тележку 7 нижней опорой 25 навешивается на вилку 10 контейнер 17, Датчик 24 фиксирует навеску контейнера 17 и
дает команду на включение привода 9. При этом, тележка 7 с контейнером 17 перемещается вверх по стойке 1 до срабатывания датчика 23, после чего тележка 7 останавливается. Одновременно подве.ска 4 своим захватом 16 снимает контейнер 17 с вилки 10 за верхнюю опору 26. Под действием массы контейнера 17 втулка t5, сжимая пружину 14, опустится вниз и развернется на 180 относительно оси симметрии валика 12, палец 13 которого будет скользить по спи- .ральному пазу 18 втулки 15. В таком положении контейнер 17 перемещается
по пути 2 конвейера.
После снятия контейнера 17 с вилки 10 датчик 24 дает команду приводу
фиг. 1
фиг. .
Б- Б
Sazpysfdx
(
Pa32py3ffcr
фиг.
&-В
фи.8.5
т&
v/m
(риз. 6
