Изобретение относится к подъемнотранспортному машиностроению, а именно к перегрузочным устройствам подвесных грузонесущих конвейеров.
Известно устройство для перегрузки изделий, выполненное в виде перемешающейся по монорельсу тележки, несущей механическую руку с захватами и механизм вертикального перемещения и поворота руки 1 .
Известное устройство сложно в эксплуатации, так как имеет сложную кинематику, управляемую посредством электронных счетно-решающих устройств.
Наиболее близким к изобретению по технической сущности является устройство для передачи изделий с подвесного грузонесущего конвейера, включающее установленный на тележке, перемещаемой вдоль конвейера, захват с водшюм, снабженный вилкой, взаимодействующей с грузовыми каретками конвейера 2}.
Недостатками известного устройства являются большие динамические нагрузки
при съеме и навеске подвесок и малая эффективность работы устройства.
Цель изобретения - снижение динамических нагрузок и повьпцение эффективности устройства.
Поставленная цель достигается тем, что на тележке закреплена обойма с горизонтальными направляющими и установленной в них рамой, а вилка смонтирована на раме с возможностью возвратнопоступательного перемещения и подпружинена.
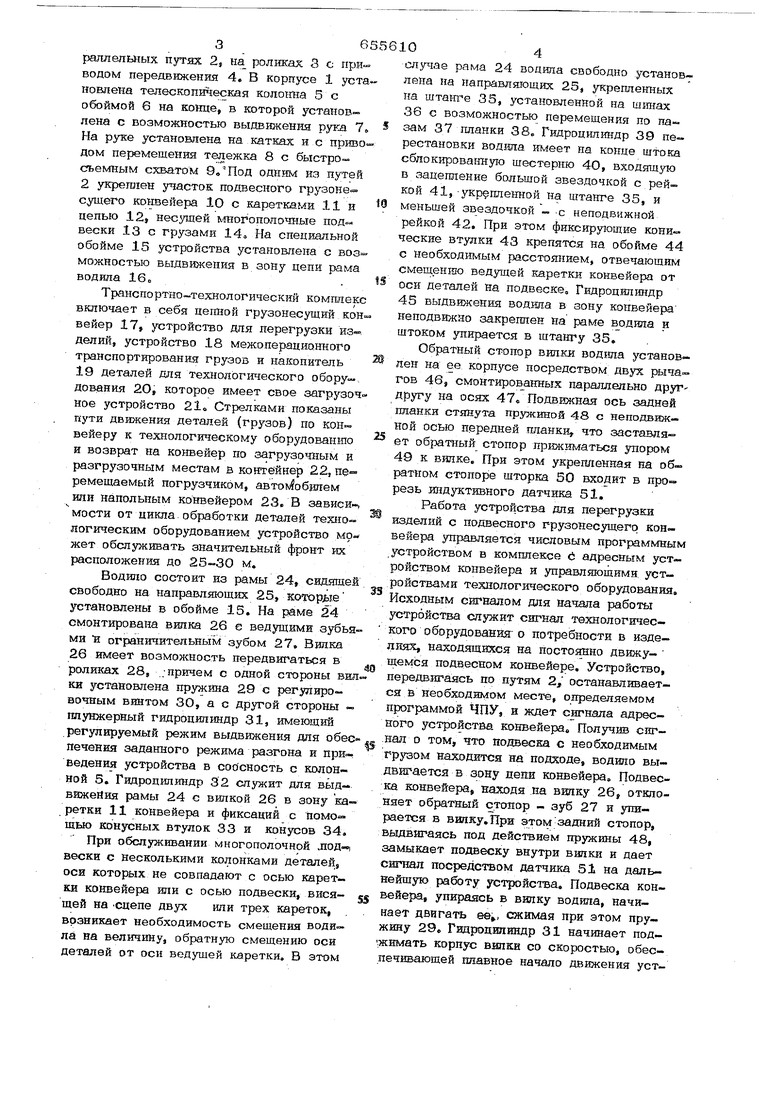
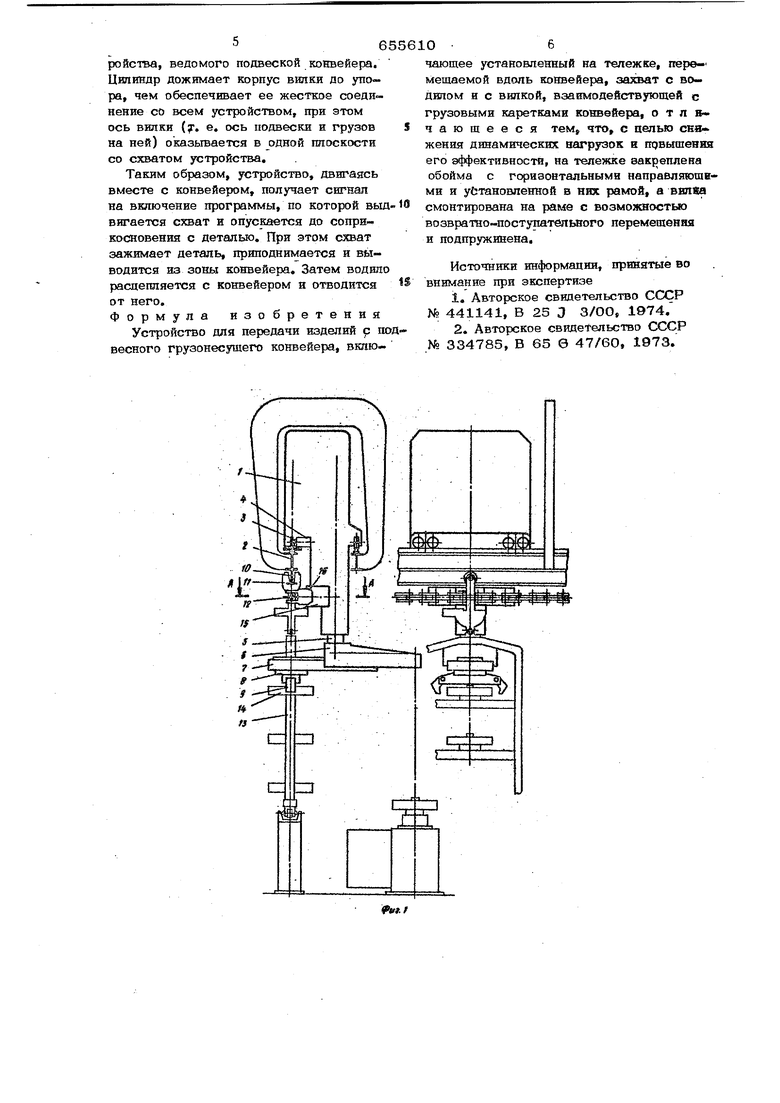
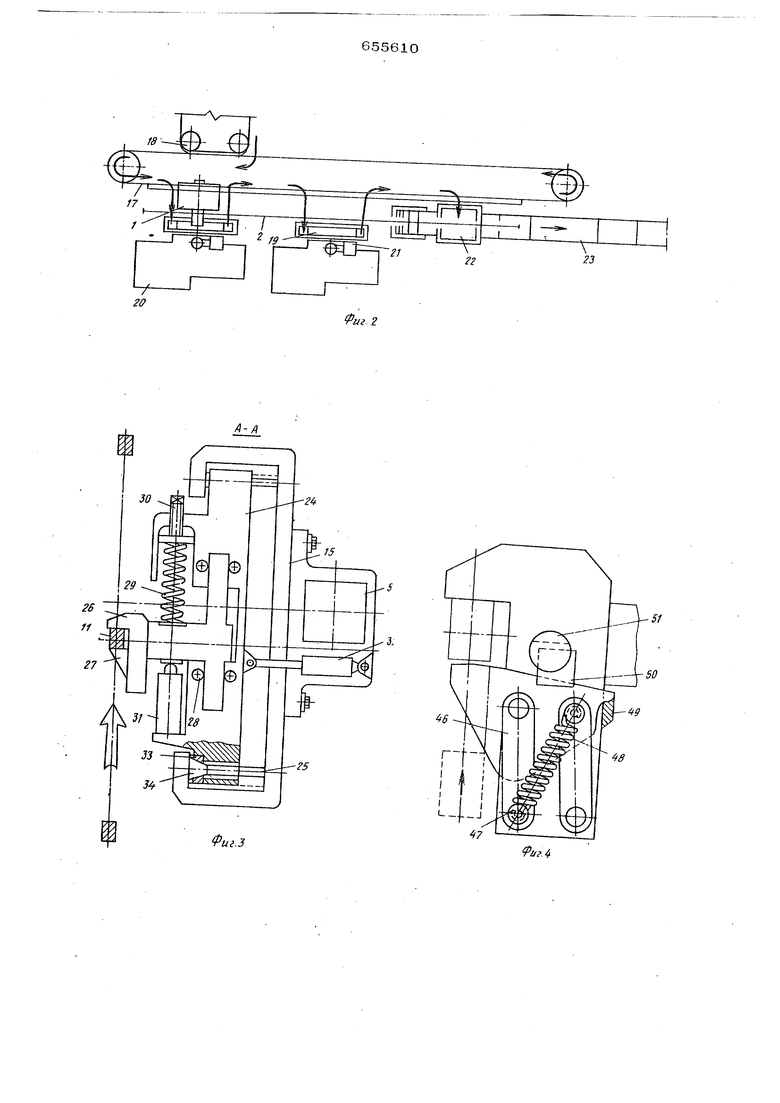
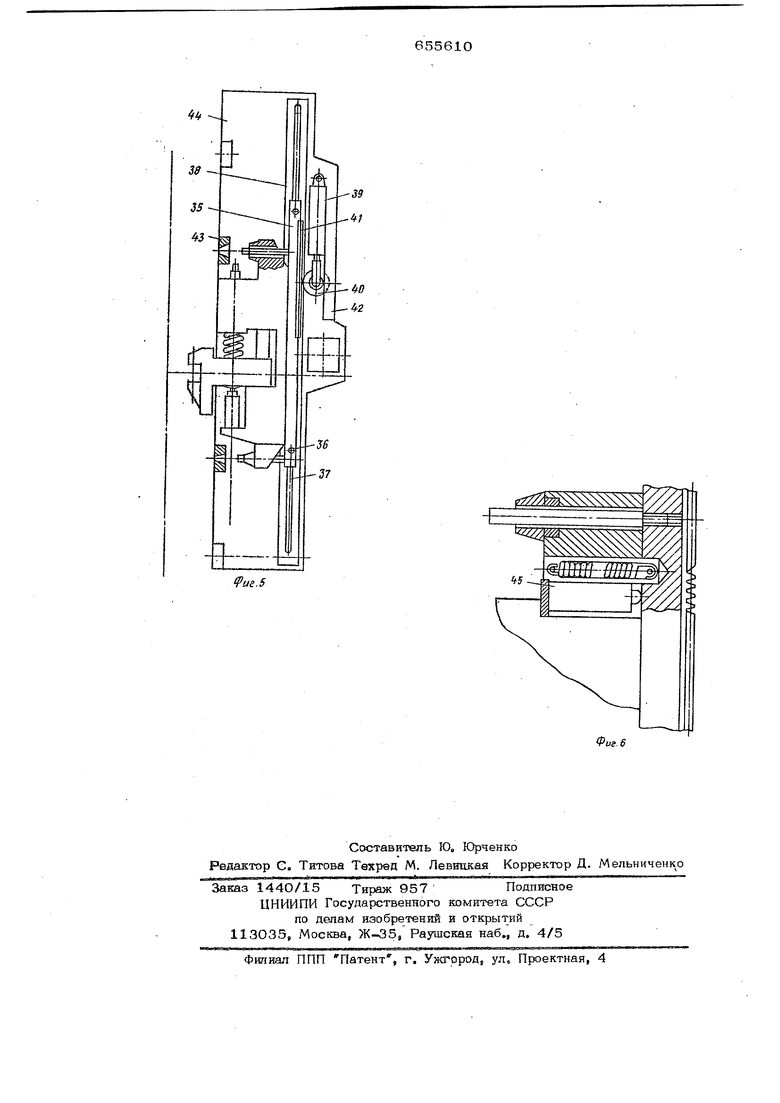
На фиг. 1 изображено предлагаемое устройство в двух проекциях-, на фиг. 2схема установки устройства в технологической цепи обработки деталей; на фиг. 3разрез А-А фиг. I; на фиг. 4 - вилка вод1иа,- на фиг, 5 - вариант выполнения устройства; на фиг. 6 - механизм выдвижешш водила (в варианте выполнения устройства).
Устройство для перегрузки изделий с подвесного грузонес 1Цего коггаейера соцержит корпус 1, устаноаченный на параллельных путях 2, на роликах 3 с при водом передвижения 4. В корпусе 1 уста новлена телескопическая колотта 5 с обоймой б на , в itoTopoft установлена с возможностью выдвижения руна 7, На руке установлена на катхсах и с приво дом перемешения тележка 8 с быстросяЕ.емным схватом 9,Под одним из путей 2 укреплен участок ггодвесного грузонесущего конвейера 10 с каретками .1.1 и цепью 12, несушей многопалочные под вески 13 с грузами 14 На специальной обойме 15 устройства установлена с воз можностью выдвижения в зону цепи pawa водила 16о Транспортно-технологическкй комплекс включает в себя нешюй грузонесущий кон вейер 17, устройство для перегрузки из делий, устройство 18 межоперационного транспортирования грузов и накопитель 19 деталей для технологического обору. дования 20, которое имеет свое загр5 зоч ное устройство 21 Стрелками показаны пути движения деталей (грузов) по кон- вейеру к технологическому оборудованшо и возврат на конвейер по загрузочным и разгрузочным местам в контейнер 22, пе-° ремещаемый погрузчиком, автом обилем или напольным конвейером 23. В зависимости от цикла обработки деталей технологическим оборудованием устройство мо жет обслуживать значительный фронт жх. расположения до 25-30 м. Водило состоит из рамы 24t сидящей свободно на направляющих 25, которке установлены в обойме 15. На раме 24 смонтирована вштка 26 е ведущими зубья ми та ограничительным зубом 27, Вилка 26 имеет возможность передвигаться в роликах 28, ..-причем с одной стороны ви ки установлена пружина 29 с регулировочным винтом 30, а с другой стороны - плунжерный гиароцютиндр 31, имеющий регулируемый режим выдвижения для обео печения заданного режима разгона и приведения устройства в соосность с колон ной 5. Гвдродилиндр 32 служит для выдвйжейия рамы 24 с вилкой 26 в зону ка ретки 11 конвейера и фиксаций с помо щью конусных втулок 33 и конусов 34, При обслуживании многополочной лод-ч вески с несколькими колонками деталеЙ9 оси которых не совпадают с осью каретки конвейера или с осью подвески, висящей на Сцепе двух или трех кареток, возникает необходимость смещения води«ла на величину, обратную смещению оси деталей от оси ведущей 1саретки. В этом случае рама 24 водгота свободно установлена на направляющих 25, укрепленных на щтат-е 35, установленной на шшгах 36 с возможностью перемещения по пазам 37 планки 38. Гидроцтиндр 39 перестановки водила имеет на конце щтока сблокированную шестерню 40, входящую в зацепление болылой звездочкой с рейкой 41,-укрепленной на щтанге 35, и меньшей звездочкой - .с неподвижной рейкой 42. При этом фиксирутащие конические втулки 43 крепятся на обойме 44 с необходимым расстоянием, отвечающим смещеН1по ведущей каретки конвейера от оси деталей на подвеске, Гидрошшиндр 45 выдвижения водила в зону конвейера неподвижно закреплен на раме водша и щтоком упирается в щтангу 35. Обратный стопор вилки водила установлен на ее корпусе посредством; двух рычагов 46, смонтированных параллельно друГ другу на осях 4 7« Подвижная ось задней планки стянута прузкиной 48 с неподвижной осью передней планки, что заставляет обратный стопор прюк: п-латьоя упором 49 к вилке. При этом укрепленная на об ратном стопоре щторка 50 входит в прорезь Я шуктивног0 датчика 51. Работа устройства для перегрузки изделий с подвесного грузонесущего конвейера управляется числовым программным устройством в комплексе сЬ адресным устройством конвейера и управляющими, устройствами технологического оборудования, Исходным сигналом дахя начала работы устройства служит сигнал технологического оборудованияо потребности в изделиях, находящихся на постоянно движущемся подвесном конвейере. Устройство, передвигаясь по путям 2, останавливается Ь необходимом месте, определяемом программой ЧПУ, и ждет сигнала адресного устройства конвейера. Получив сигнал о том, что подвеска с необходимым грузом находится на подходе, водило выдвигается в зону дели конвейера. Подвеска конвейера, находя на вилку 26, отклоняет обратный стояор - зуб 27 и упирается в вилку,При этом-задний стопор, выдвигаясь под действием пружины 48, замыкает подвеску внутри вш1ки и дает сигнал посредством датчика 51 на дальнейщую работу устройства. Подвеска конвейера, упираясь в вилку водила, начинает двигать ее, сжимая при этом пружшзу 29. Гидроднлиндр 31 начинает подимать корпус взшки со скоростью, обеспечивающей плавное начало движения устройства, ведомого подвеской конвейера. Цилиндр дожимает корпус вилки до упора, чем обеспечивает ее жесткое соединение со всем устройством, при этом ось вилки . е, ось подвески и грузов на ней) оказьгоается в одной плоскости со схватом устройства.
Таким образом, устройство, двигаясь вместе с конвейером, получает сигнал на включение программы, по которой вьшВйгается схват и опускается до соприкосновения с деталью. При этом схват зажимает деталь, приподнимается и выводится из зоны конвейера. Затем водило расцепляется с конвейером н отводится от него. Формула изобретения
Устройство для передачи изделий р подвесного грузонесущего конвейера, включающее установленный на тележке, пере- мешаемой вдоль конвейера, захват с во- ДЕЛОМ и с вилкой, взаимодействующей с грузовыми каретками конвейера, отличающееся тем, что, с целью сна- жения динамических нагрузок и повыщення его эффективности, на тележке вакренлена обойма с горизонтальными направляющими и установленной в нгос рамой, а ввлва смонтирована на раме с возможностью возвратао-поступательного перемещения и подпружинена.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство MO 441141, В 25 J З/ОО, 1974.
2.Авторское свидетельство СССР № 334785, В 65 0 47/60, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки подвесок с подвесного конвейера | 1978 |
|
SU770951A1 |
| Устройство для перегрузки подвесок с подвесного грузонесущего конвейера на рабочее место | 1975 |
|
SU612868A1 |
| Устройство для перегрузки изделий с подвесного конвейера | 1986 |
|
SU1468827A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для навески и съема изделий с подвесок подвесного конвейера | 1981 |
|
SU994376A1 |
| Подвесной грузонесущий конвейер | 1977 |
|
SU745801A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Устройство для загрузки и разгрузки подвесного конвейера | 1982 |
|
SU1060548A2 |
| Подвесная цепная конвейерная установка | 1979 |
|
SU1052151A3 |
| Манипулятор | 1977 |
|
SU707792A1 |
A-A
Фиг.З
47
иг.
.5
Фие.6
