(21)4162894/27-03
(22)31J0.86
(46) ЗОоОб.ЗЗа Бюло № 24
(71)Специальное конструкторско-тех- нологическое бюро медицинской техники
(72)В.Ф.Рябчун
(53)621о867 (088о8)
(56)Авторское свидетельство СССР № 1157144, кл, С 25 D 17/06, 1985,
Авторское свидетельство СССР № 44321, кл, В 65 G 17/16, 1935.
(54)ПОДЪЕМНО-ПОДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ АВТООПЕРАТОРНОЙ ЛИНИИ
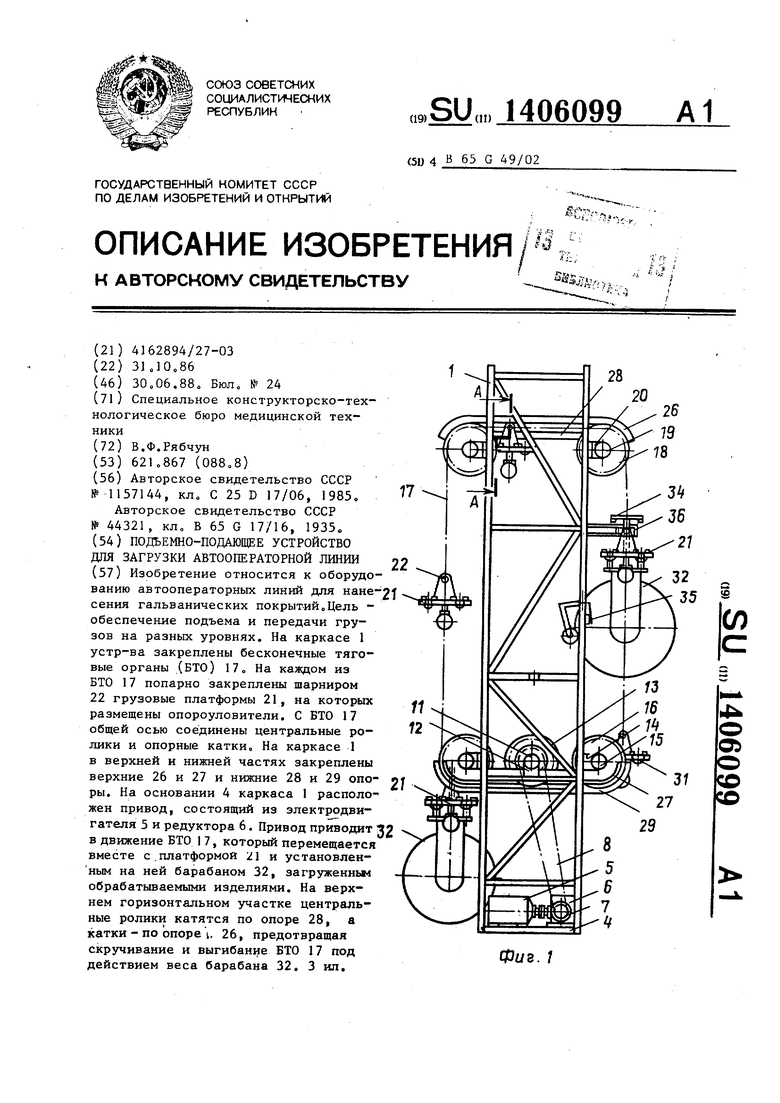
(57)Изобретение относится к оборудованию автооператорных линий для нане-2| сения гальванических покрытий„Цель - обеспечение подъема и передачи грузов на разных уровнях. На каркасе I устр-ва закреплены бесконечные тяговые органы (БТО) 17, На каждом из
ВТО 17 попарно закреплены шарниром 22 грузовые платформы 21, на которых размещены опороуловители, С БТО 17 общей осью соединены центральные ролики и опорные катки. На каркасе 1 в верхней и нижней частях закреплены верхние 26 к 27 и нижние 28 и 29 опоры. На основании 4 каркаса I расположен привод, состоящий из электродвигателя 5 и редуктора 6. Привод приводит Ч в движение ВТО 1 7, который перемещается вместе с.платформой 21 и установлен- ным на ней барабаном 32, загруженньм обрабатываемыми изделиями. На верхнем горизонтальном участке центральные ролики катятся по опоре 28, а катки - по опоре I, 26, предотвращая скручивание и выгибание БТО 17 под действием веса барабана 32, 3 ил.
17
|
22
(Л
О Од
2/
31
фиг. 1
Изобретение относится к оборудованию автооператорных-линий для нанесения гальванических покрытий, а именно к подъемно-подающим устройст- вам для нанесения покрытий, например при изготовлении ячейковых рентгеновских растров из стеклянных или си- таловых заготовок
Цель изобретения - обеспечение подъема и передачи грузов на разных уровнях и в разных плоскостях
На фигс представлен общий вид устройства (вид спереди)j на - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг о 1 о
Подъемно-подакяцее устройство состоит из каркаса 1, содержащего боковые стойки 2 и 3 рамной конструкции и основание 4 На основании 4 распо- ложен привод, состоящий из электродвигателя 5 и редуктора 6, на выходном валу которого установлена приводная звездочка 7, которая через приводную цепь 8 имеет возможность .взаимодействия с ведомой звездочкой 9, жестко установленной на конце приводного вала 10, выступающего за боковую стойку 3.
Приводной вал 10 установлен в ниж ней части каркаса 1 в подшипниках 11 кронштейнов 12, закрепленных на боковых стойках 2 и 3. На приводном валу 10 симметрично по обеим сторонам его с внутренней стороны стоек 2 и 3 жестко закреплены ведущие звездочки 13„ К внешним сторонам боковых стоек 2 и 3 прикреплены кронштейны 14, в которых установлены подшипники 15, а на их оси - направляющие звездочки 16, которые через бесконечные тяговые органы 17 связаны с направляюще-натяжными звездочками 18« Последние установлены в верхней части каркаса 1 на осях подшипников 19, разме щенных в кронштейнах 20, которые закреплены на внешних сторонах боковых стоек 2 и 3 на одной горизонтальной оси
На каждом из бесконечных тяговых органов 17 на одной горизонтальной оси закреплены попарно через заданные ра.сстояния грузовые платформы 21 посредством шарниров 22, оси которых прикреплены с наружной стороны к тяговым органам 17 С противоположной шарнирам 22 стороны тягового органа 17 на оси 23 центральных роликов 24 установлены опорные катки 25, с воз
с
s
0 5
о п дс
5
50
55
можностью взаимодействия своими поверхностями с верхними опорами 26, закрепленными в верхней части стоек 2 и 3 и верхними опорами 27, закрепленными в нижней части стоек 2 и 3.
Под верхними опорами 26 и 27 закреплены нижние опоры 28 и 29 с возможностью взаимодействия с центральными роликами 24. На грузовых платформах 21 в нижней их части, между бесконечными тяговыми органами 17, закреплены грузы 30, а над ними - опороловители 31 для установки в них барабанов 32.
Барабаны 32 снабжены опорами 33, взаимодействующими с опороловителя- ми 31 о На барабане 32 установлены также опороловители 34, имеющие возможность взаимодействия с опорами захватного органа автооператора (не показаны)„
Закрепление грузовых платформ 21 посредством шарниров 22 таким образом, что центр тяжести грузовых платформ 21 смещен ниже оси закрепления, дает возможность грузовым платформам 21 и опороловителям 31 сохранять постоянно первоначальное положение подвешенного барабана 32 с изделиями.
На боковых стойках 2 и 3 закреплен датчик 35 наличия барабана 32. Спереди к боковым стойкам 2 и 3 над- датчиком 35 наличия барабана 32 прик реплен датчик 36 наличия платформы 21 на ПОЗИЦИИ- передачи.
Устройство работает следующим образом.
Барабан 32, установленный опорами 33 на опороловители 31 грузовых платформ 21, загружается обрабатываемыми изделиями (не показаны) на позиции загрузки. Включается электродвигатель 5 привода, через редуктор 6 и звездочку 7 приводная цепь 8 передает вращение ведомой звездочке 9 и соответственно приводному валу 10 с ведущими звездочками 13, которые приводят в движение бесконечные тяговые органы 17, которые перемещаются по направляющим звездочкам 16 и направляюще-натяжным звездочкам 18о
Вместе с бесконечными тяговыми органами 17 перемещаются грузовые платформы 21 с установленным на них барабаном 32.
При движении по замкнутому контуру барабан 32 поднимается вертикально, затем перемещается по верхнему горизонтальному участку бесконечных тяговых органов с сохранением первоначального положения и опускается по стороне устройства, противоположной позиции загрузки барабана 32 - позиции разгрузки.
На верхнем горизонтальном участке центральные ролики 24 тяговых органов 17 катятся по нижней опоре 28, а опорные катки 25 катятся по верхней опоре 26, предотвращая тем самым скручивание и выгибание тяговых органов 17 под действием веса барабана 32.
Когда платформы 21 опустятся на позицию передачи (снятия с платформы 21), срабатывает датчик 36 и передается сигнал в систему управления (не показана) приводом подъемно-подающего устройства на отключение электродвигателя 5 и в систему управления автооператором (не показана) о наличии платформ 21 на позиции передачи. Одновременно в систему управления автооператором от датчика 35 подается сигнал о наличии или отсутствии барабана 32 на позиции передачи.
Б этот момент на позицию загрузки подается очередной барабан 32, где из него выгружаются обработанные изделия и загружаются изделия для обработки.
Барабан 32, стоящий на позиции передачи, захватьшается автоматически за опороловители 34 опорами на захвате автооператора (не показан) и поднимается ими При этом, барабан 32 снимается с опороловителей 31 грузовых платформ 21, затем автооператор перемещает барабан 32 на технологическую операцию и обратно.
Сигналы от датчиков 35 о наличии барабана 32 на позиции передачи и датчика 36 наличия платформ 21 на позиции передачи поступают на устройство управления, с которого осуществляется управление электродвигателем 5 привода. При передаче автооператором барабанов 32 с технологических операций на подъемно-подающее устройство, барабан 32 перемещается автооператором при поступлении сигнала от датчика 36 наличия грузовых платформ 21 на позиции передачи и отсутствия сигнала от датчика 35 о наличии барабана 32 на позиции передачи.
0
5
0
5
0
5
0
5
0
5
При этом, автооператор опускает барабан на грузовые -платформы 21 и опоры 33 барабана 32 взаимодействуют с опо- роловителями 31 платформ 21, а опороловители 34 барабана 32 разъединяются с опорами на захвате автооператора. После этого автооператор перемещается от подъемно-подающего устройства, включается электродвигатель 5 привода и барабан 32 опускается вниз и перемещается до тех пор, пока очередная пара грузовых платформ 21 не поступит на позицию передачи, при этом сработает датчик 36, электродвигатель 5 отключится.
Располагая через определенные расстояния на бесконечных тяговых органах 17 грузовые платформы 21, можно обеспечить заданный цикл работы подъемно-подающего устройства
С помощью датчиков 35 и 36 осуществляется управление подъемно-подающим устройством и автооператором в заданном режиме. При этом, устройство работает таким образом, что во время перемещения автооператором барабана 32 на технологическую операцию обработки изделий на позиции загрузки находится барабан, из которого производится выгрузка обработанных изделий и загрузка изделий, предназначенных для обработки.
Формула изобретения
Подъемно-подающее устройство для загрузки автооператорной линии,включающее каркас с закрепленными на нем бесконечными тяговыми органами и прикрепленными к нему с помощью щар- ниров грузовыми платформами и привод, отличающееся тем, что, с целью обеспечения подъема и передачи грузов на разных уровнях и в разных плоскостях, оно снабжено опоро- ловителями, размещенными на грузовых платформах, попарно закрепленных на тяговых органах, центральными роликами и опорными катками с общей осью, соединенной с тяговыми органами, и верхними и нижними опорами, закрепленными на каркасе в его верхней и нижней частях, при этом опорные катки и центральные ролики установлены с возможностью взаимодействия соответственно с верхними и нижними опорами.
Ф(/е.2
-А
И
гг
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператорная линия для обработки изделий в жидкой среде | 1986 |
|
SU1371956A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Автооператорная линия для гальванохимической обработки мелких деталей в барабанах | 1983 |
|
SU1105518A1 |
| Грузоподъемный автооператор | 1974 |
|
SU582178A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Подъемное устройство | 1990 |
|
SU1722981A1 |
| Автооператорная гальваническаялиНия | 1979 |
|
SU831881A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Автооператорная гальваническая линия | 1987 |
|
SU1423633A2 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2010 |
|
RU2455216C2 |