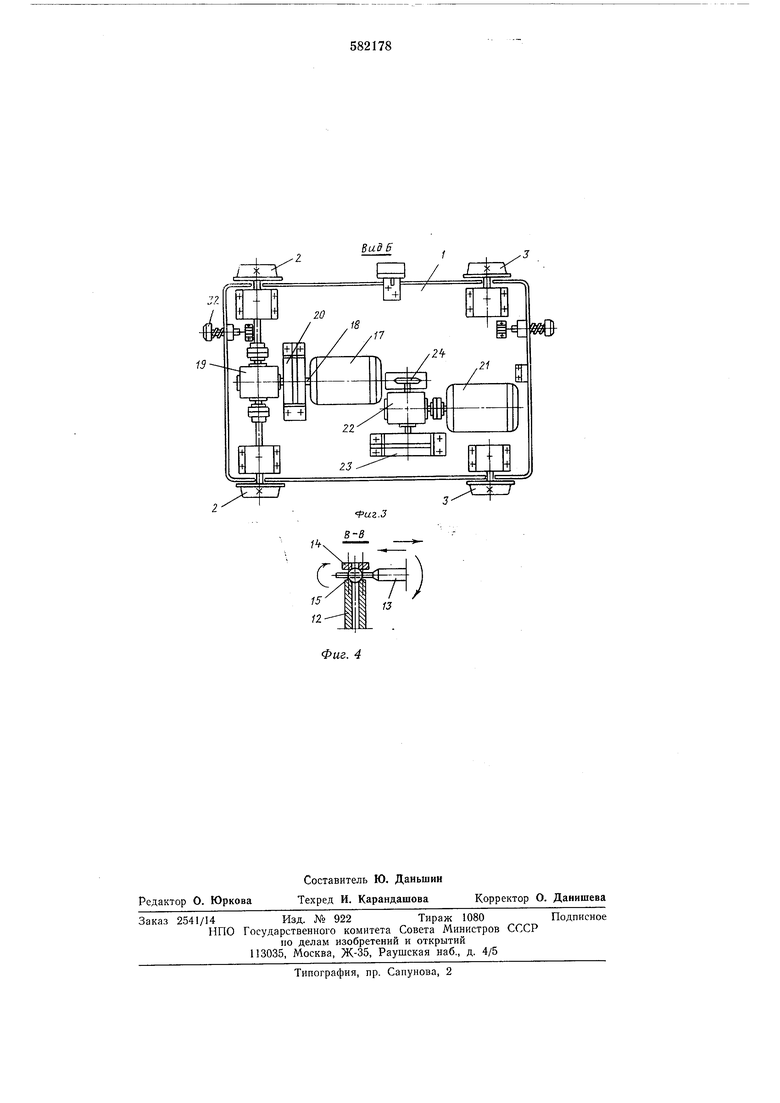
Па тележке также установлен электродвигатель 21 подъема груза, который через редуктор 22 кинематически связан с тормозом
23и ведущей звездочкой 24.
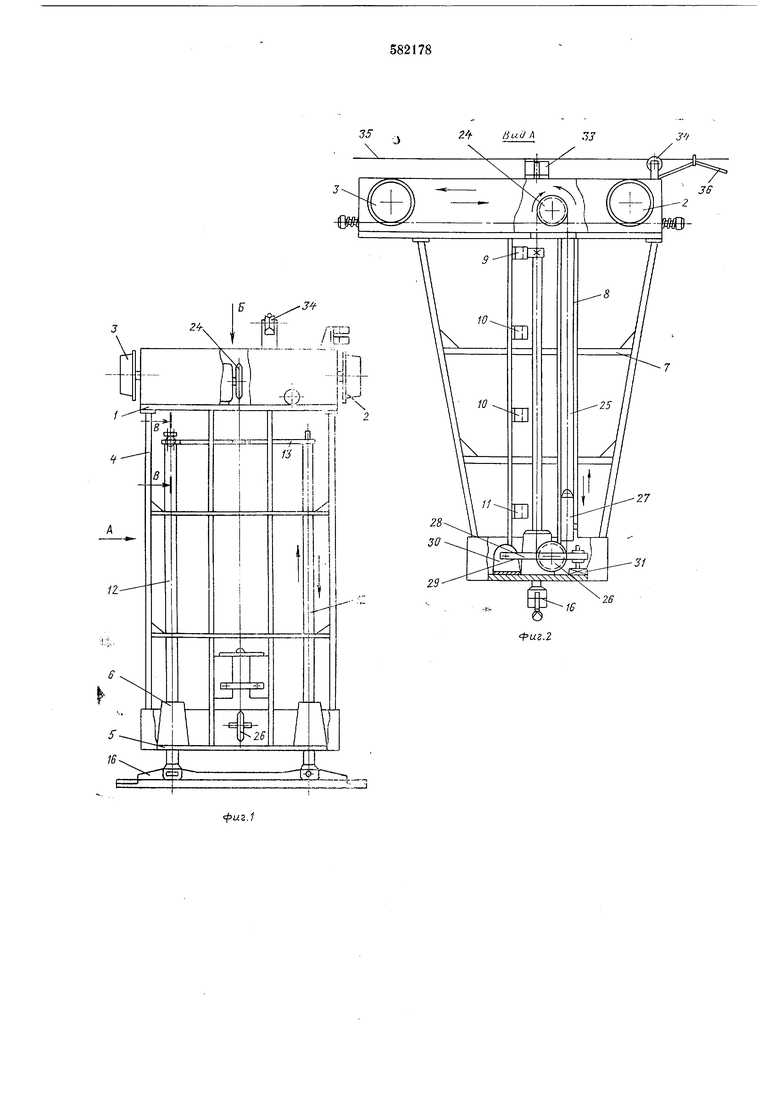
Звездочка 24 запасована цепной нередачей 25, которая связа;на с ведомой звездочкой 26 и соединена с противовесом 27.
Цепная передача 25 жестко соединена с перемычкой 13.
Звездочка 26 посажена на рычаг 28, один конец которого на оси 29 накреплен на раме 30, а другой связан с натяжным устройством 31.
Тележка 1 снабжена буферными приспособлениями 32, датчиком 33 горизонтального положения тележки и роликом 34 поддержки троса 35, на котором подвешен кабель 36.
Автооператор работает следующим образом.
Для вертикального перемещения груза включается электродвигатель 21 при расторможенном тормозе 23, и вращение через редуктор 22 передается на ведущую звездочку
24и цепную передачу 25.
Вместе с цепной передачей 25 перемещается перемычка 13 с вертикальныМИ тягами 12, которые, проходя через направляющие опоры 6, перемещают вертикально грузозахватный орган 16 с грузам (не показан).
При отключенном электродвигателе 21 прекращается поступление тока в катушку тормоза 23, который стопорит редуктор 22.
Горизонтальные перемещения автооператора осуществляются электродвигателем 17, который приводит во вращение ведущие катки 2 через редуктор 19.
При включенном электродвигателе 17 тормоз 20 расторможен.
При отключении электродвигателя 17 прекращается поступление тока в катущку тормоза 20, который при этом стопорит редуктор 19 и останавливает движение.
Совершая движение в направлении заданной позиции, автооператор проходит ряд устройств, расположенных вдоль пути его следования и воздействующих на датчик 33 горизонтального положения.
От одного из этих устройств (не показано), расположенного над центром остановочной позиции, поступает сигнал переключения электродвигателя на меньщую скорость.
При совмещении плоскости тяг 12 с центром позиции электродвигатель 17 отключается и затормаживается как описано выще. После остановки автооператора включается электродвигатель 21, тормоз 23 растормаживается и начинается вращение звездочки 24.
При совмещении устройства воздействия на датчики с заданным по высоте одним из датчиков 9, 10 и 11 происходит остановка грузозахватного органа.
Формула изобретения
Грузоподъемный автооператор, содержащий
тележку, перемещающуюся по подвесным путям, приводы горизонтального перемещения тележки и вертикального перемещения груза, включающие электродвигатели с редукторами и тормозами, смонтированными на тележке, платформу и тяговую цепь с ведущей и ведомой звездочками с грузозахватным органом, отличающийся тем, что, с целью повышения надежности работы привода вертикального перемещения груза и уменьшения
металлоемкости автооператора, платформа снабжена вертикальными стойками и направляющими опорами, причем вертикальные стойки прикреплены к тележке, а в направляющих опорах с возможностью вертикального
перемещения установлены вертикальные тяги, верхние концы которых связаны с тяговой цепью, а нижние - с грузозахватным органом, при этом тяговая цепь снабжена противовесом.
Источники информации,
принятые во внимание при экспертизе
1.Патент ФРГ № 1234145, кл. 81е 82/02, 1967.
2.Патент США 3501022, кл. 212-128, 1970.
Визе
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-подающее устройство для загрузки автооператорной линии | 1986 |
|
SU1406099A1 |
| ПРИВОД ЦЕПНОЙ ДЛЯ СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2544915C1 |
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
| Перегрузочное устройство | 1987 |
|
SU1519984A1 |
| Устройство для шаговых перемещений груза | 1988 |
|
SU1583332A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |