«ч
00
Изобретение относится к машиностроению и может быть использовано в робототехнике и гибких автоматизированных производствах,, например, для управления движением звеньев машин, в том числе входящих в единую производственную систему, которую образует коллектив взаимодействующих друг с другом промьштенных роботов, металлорежущих станков и т.п.
Целью изобретения является повышение точности отработки закона движения каждого тела системы (в том числе точности синхронизации движения всех тел системы), упрощение конструкции и повьщ1ение надежности.
Процесс управления строят следующим образом.
Задают закон перемещения каждого тела, по информации о текущем положении каждого тела определяют расчетное время., соответствующее его текущему положению, определяют фактическое время, сравнивают расчетное врем с фактическим и по рассогласованию между ними формируют сигнал управления приводами каждого тела.
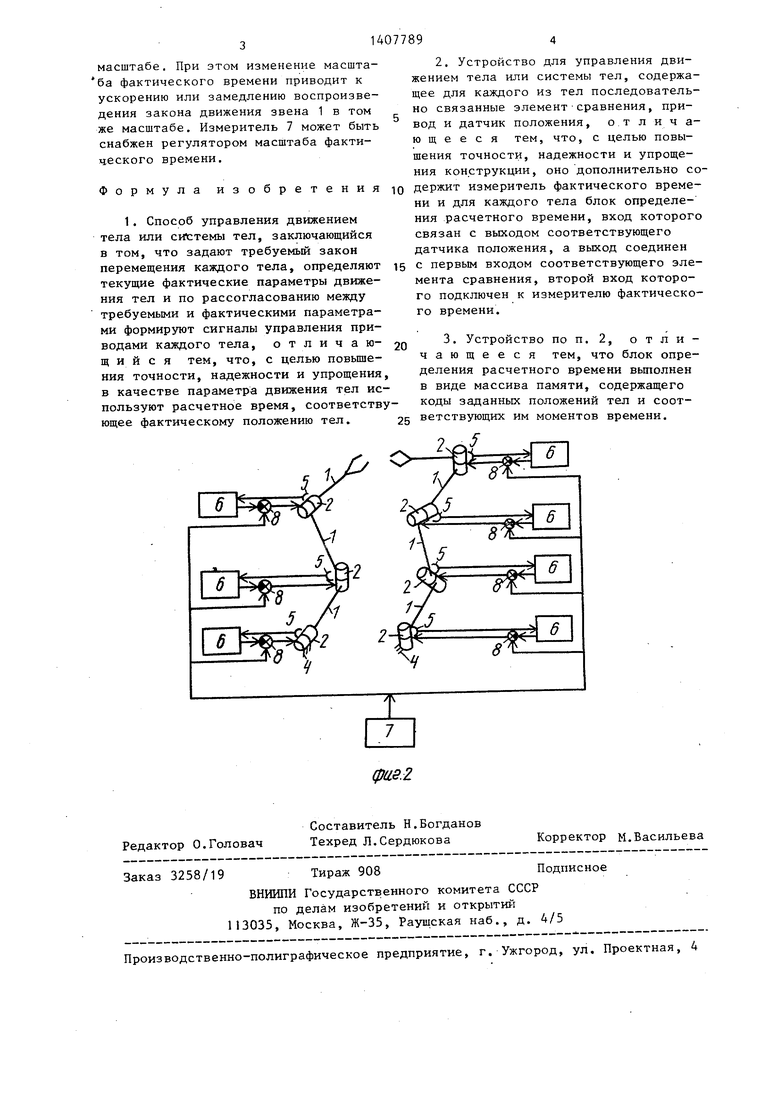
На фиг. 1 изображено устройство, реализующее предлагаемый способ, при управлении движением одного тела} на фиг. 2 - то же, при управлении движением cиcтe ы тел.
Устройство управления звеном 1 (телом, фиг. 1) или системой звеньев (тел, фиг. 2) содержит привод 2, например J с ходовым винтом 3 (фиг. 1), неподвижное основание 4, датчик 5 положения, блок 6 определения расчетного времени, измеритель 7 фактического времени (например, таймер), элемент 8 сравнения и усилитель 9 (фиг. 1).
Датчик 5 положения каждого тела связан с входом своего блока 6 определения расчетного времени, выход которого связан с первым входом соответствующего элемента 8 сравнения. Второй вход элемента 8 сравнения связан с измерителем 7 фактического времени, а выход - с усилитем 9 и приводом 2.
Устройство работает следующим образом.
Пусть требуется перемещать звено 1 вдоль оси X в соответствии с задан ным законом движения (фиг. 1)
X x(t) , (1)
5
0
5
0
5
0
5
0
5
который устанавливает связь текущей коор,динаты X звена 1 с временем t. На основании закона движения (1) мо- жет быть найдена функция
t t(x). (2)
Для того, чтобы по выражению (2). определить t, нужно знать значение текущей координаты х звена 1, которую определяет датчик 5 положения. Информация о текущем положении звена 1 (координата х) от датчика 5 поступает на вход блока 6 определения расчетного времени. В этом блоке по заранее введенной в него зависимости, общий вид которой определяется уравнением (2), и текущему значению х определяется текущее расчетное время t.
Из блока 6 время t поступает на входов элемента 8 сравнения, на второй вход которого поступает значение времени Т с выхода таймера 7, при этом элемент 8 сравнения определяет величину разности (T-t),
в соответствии с которой формируется сигнал управления скоростью привода 2, который посредством ходового винта перемещает звено 1. Знак разности (T-t), как это обычно происходит в следящих системах управления, определяет текущее направление вращения ротора привода .2.
В устройстве управления системой тел (звеньев, фиг. 2) выход измерителя 7 фактического времени связан с элементами 8 сравнения всех приводов. При этом синхронизация движения отдельных звеньев, например, каждого робота, а также обоих роботов обеспечивается пространство - временной обратной связью, в которой реальное время Т измеряется одним измерителем 7 времени (таймером).
Блок 6 определения расчетного времени может быть выполнен, например, в виде массива памяти с ячейками, содержащими коды текущего положения тела и соответствующие моменты времени. Выполняемая им операция определения расчетного времени по уравнению (2), заданному аналитически или таблично (численно), может быть реализована на любой микро-ЭВМ с помощью стандартной программы поиска. Фактическое время может не совпадать с реальным временем как по началу отсчета так и по скорости течения. Оно может отсчитываться в установленном
масштабе. При этом изменение масшта- ба фактического времени приводит к ускорению или замедлению воспроизведения закона движения звена 1 в том же масштабе. Измеритель 7 может быть снабжен регулятором масштаба фактического времени.
Формула изобретения
1. Способ управления движением тела или системы тел, заключающийся в том, что задают требуемый закон перемещения каждого тела, определяют текущие фактические параметры движения тел и по рассогласованию между требуемыми и фактическими параметрами формируют сигналы управления приводами каждого тела, о т л и ч а ю- щ и и с я тем, что, с целью повьш1е- ния точности, надежности и упрощения, в качестве параметра движения тел используют расчетное время, соответствующее фактическому положению тел.
5
0
2. Устройство для управления движением тела или системы тел, содержащее для каждого из тел последовательно связанные элемент сравнения, привод и датчик положения, отличающееся тем, что, с целью повышения точности, надежности и упрощения конструкции, оно дополнительно содержит измеритель фактического времени и для каждого тела блок определения расчетного времени, вход которого связан с выходом соответствующего датчика положения, а выход соединен с первым входом соответствующего элемента сравнения, второй вход которого подключен к измерителю фактического времени.
3. Устройство по п. 2, отличающееся тем, что блок определения расчетного времени вьтолнен в виде массива памяти, содержащего коды заданных положений тел и соот25 ветствующих им моментов времени.
2. 1 2.5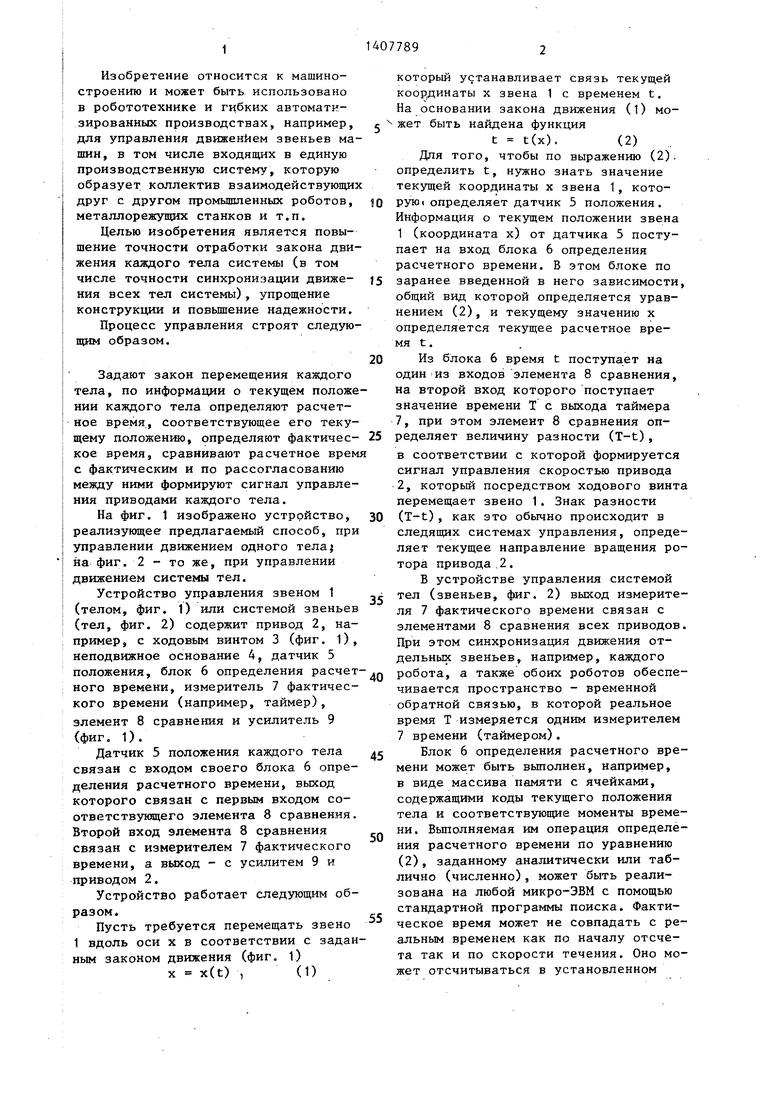
| название | год | авторы | номер документа |
|---|---|---|---|
| Приводное устройство | 1989 |
|
SU1696298A1 |
| Система управления промышленным роботом | 1981 |
|
SU1127767A1 |
| Способ контроля качества воспроизведения программы движения робота-манипулятора и устройство для его осуществления | 1985 |
|
SU1377179A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Устройство для управления приводом робота | 1989 |
|
SU1646852A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2296668C2 |
| Промышленный робот | 1985 |
|
SU1301685A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2272705C2 |
Изобретение относится к области машиностроения и может быть использовано в робототехнике и гибких автоматизированных производствах. Целью изобретения является повьше- ние точност|Н отработки закона движения, упрощение конструкции и повьше- ние надежности. Для этого процесс управления строят следующим образом. Задают закон перемещения каждого тела, по информации о текущем положении каждого тела определяют расчетное время, соответствующее его текущему фактическому положению, определяют фактическое время, сравнивают расчетное время с фактическим временем и по рассогласованию между ними формируют сигнал управления приводами каждого тела. Устройство, реализующее данный способ управления, снабжено измерителем 7 фактического времени и блоксэм 6 опре- деления расчетного времени, а также содержит элемент сравнения 8, усилитель 9, привод 2, перемещающий тело 1, и датчик 5 положения тела 1. 2 с. и 1 з.п. ф-лы, 2 ил. (Л
| Агурский М.С | |||
| и др | |||
| Числовое программное управление станками, - М.: Машиностроение, 1966, с | |||
| Ветряный много клапанный двигатель | 1921 |
|
SU220A1 |
| Счетный сектор | 1919 |
|
SU107A1 |
