(Л
ч
ф
00
Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам для перемещения изделия по пространственным кривым.
i Целью изобретения является расширение функциональных возможностей з ;чет увеличения числа степеней подвижности и уменьшения погрешности позиционирования исполнительного ор ана.
На чертеже показана кинематичес- сая схема манипулятора.
На основании смонтированы шарнир ио-рычажные механизмы 1 и 2. Связы- пающий их шарнирный узел содержит два стержня 3 и 4. Стержень 3 связа : шатуном 5 механизма 1 с помощью цилиндрической пары 6, а стержень 4 связан с шатуном 7 механизма 2 с помощью цилиндрической пары 8. На :тержне 3 закреплен исполнительный cfpraH 9 с изделием. Ось цилиндричес 1:ой пары 6 параллельна осям враща - п ельных пар механизма 2. Соединение с;тержней 3 и 4 шарнирного узла осу- П вствлено посредством телескопичес- joro со стопором винна Ю, образующего со стержнями 3 и 4 шарнирного 5зла соосные винтовые пары 11 и 12 с правой и левой резьбами, при этом ссь винта перпендикулярна к осям цилиндрических пар 6 и 8.
Привод осуществляется от двух двгателей, установленных на основании с помощью вращательных пар 13 и 14. ; Манипулятор работает следукнцим оразом.
В основном режиме телескопическое Соединение винта 10 расстопорено. ; ижение от пар 13 и 14 через щйтуны S и 7 и цилиндрические пары 6 и 8 т ередается стержням 3 и 4 шарнирного зла и исполнительному органу 9 с { зделием. При этом части винта 10, с|оединенные между собой телескопичес- лЫ, смещаются друг относительно дру
га. Оси цилиндрических пар 6 и 8, перемещаясь, остаются параллельными самим себе, что обеспечивает поступательное движение изделия, каждая из точек которого движется по пространственной кривой.
Согласовывая законы движения двигателей и различную последовательность их включения можно получить различные траектории движения изделия.
Формула изобретения
5
0
5
0
5
0
5
Манипулятор, содержащий основание, смонтированные на нем два шарнирно- рычажных механизма, каждый из которых содержит два поворотных звена и соединяющий их шатун, причем шатуны обоих механизмов связаны между собой шарнирным узлом, который связан с исполнительным органом, и приводы, отличающийся тем, что, с целью расширения функциональных возможностей за счет увеличения числа степеней подвижности и уменьшения погрешности позиционирования исполнительного органа, звенья каждого шар- нирно-рычажного механизма соединены между собой и с основанием с помощью вращательных кинематических пар, оси которых в одном механизме взаимно параллельны, а в двух-механизмах расположены под углом, при этом шарнирный узел связи шатунов выполнен в виде двух перекрещивающихся стержней, один из, которых связан с исполнительным органом, причем каждый из этих стержней связан дополнительно введенной цнпиндрической парой с соответствующим шатуном одного из указанных механизмов и расположен параллельно осям его шарниров, а между собой эти стержни связаны винтом с телескопическим стержнем, образующим с указанными стержнями винтовые пары соответственно с правой и левой резьбой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ G-РОБОТ | 2021 |
|
RU2758392C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ПРОСТРАНСТВЕННЫЙ РЕГУЛИРУЕМЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РОБОТА | 2003 |
|
RU2245241C2 |
| Погрузочно-транспортный агрегат | 2022 |
|
RU2776189C1 |
Изобретение относится к области машиностроения, в частности к манипуляторам и промышленным роботам для перемещения изделия по пространственным кривым. Целью изобретения является расширение функциональных возможностей за счет увеличения числа степеней подвижности и уменьшения погрешности позиционирования исполнительного органа. Привод осуществляется на вращательные пары 13 и 14, при этом шарнирно-рычажные механизмы 1 и 2 поворачиваются и их шатуны 5 и 7 смещают стержни 3 и 4, связанные между собой телескопическим винтом 10, образующим со стержнями 3 и 4 соосные винтовые пары 11 и 12 с правой и левой резьбами. 1 шт.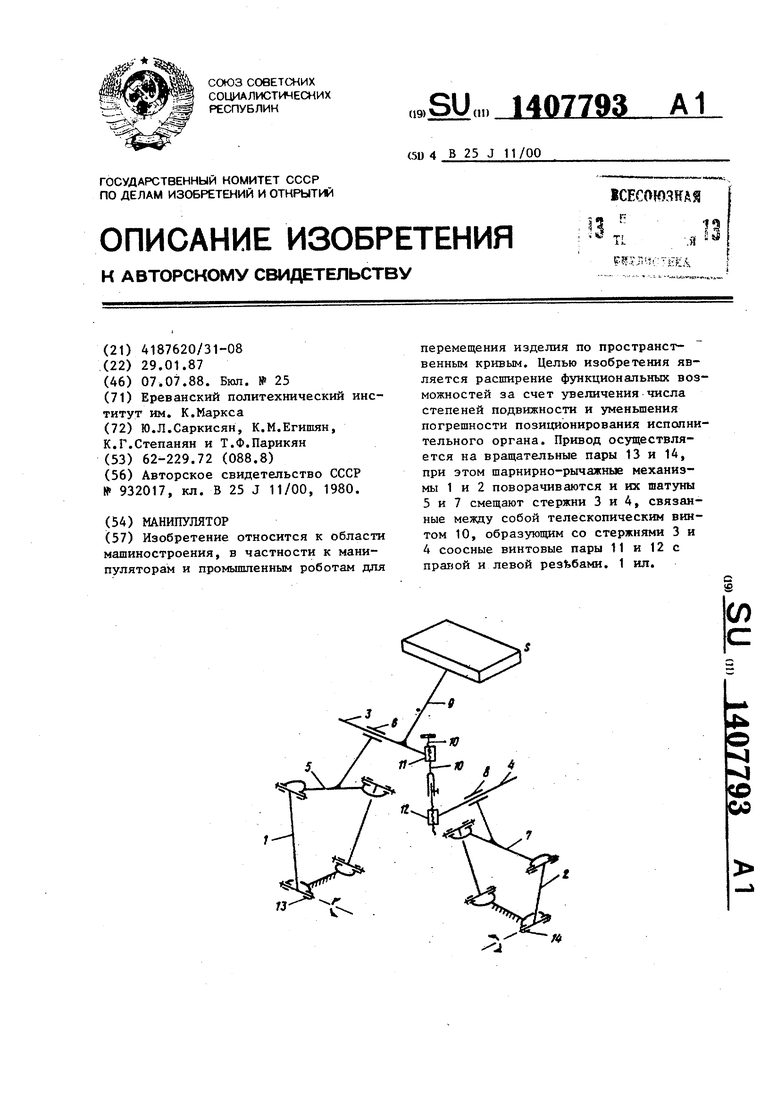
| Шарнирно-рычажный дифференциал Э.М.Кудинцева | 1980 |
|
SU932017A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
