k ШАРНИРНО-РЫЧАЖНЫЙ ДИФФЕРЕНЦИАЛ Э.М. КУДИНЦЕВА
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| ИСПЫТАТЕЛЬНЫЙ ВИВРОСТЕНД | 1969 |
|
SU251884A1 |
| Летучие ножницы | 1977 |
|
SU742054A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| Зубчато-рычажный кулисный механизм с выстоем ведомого звена | 1979 |
|
SU903628A1 |
| Привод подачи фрезерного станка для обработки вафельной конструкции обечайки | 2024 |
|
RU2824782C1 |
| Зубчато-рычажный вариатор | 1979 |
|
SU868200A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
1
Изобретение относится к машиностроению и может быть использовано в различных машинах, автоматах, в частности в робототехнике, в качестве пространственного манипулятора и пространственного генератора движений.
Известен шарнирно-рычажный дифференциал, содержащий шарнирно сочлеченные входные и выходные звенья и приводы .
Однако известный -дифференциал обеспечивает только две степени свободы выходному з.вену и объекту, если он связан с этим звеном, что снижает возможность пространственного перемещения объекта.
Цель изобретения - получение пространственного перемещения выходного звена.
Поставленная цель достигается тем, что дифференциал снабжен двоиным кривошипно-шатунным механизмом, шатуны которого связаны между собой
дополнительно введенным шарнирным узлом, содержащим два звена, расположенные друг относительно друга с возможностью вращения, примем каждый из шатунов связан с одним из звеньев шарнирного узла с возможностью поступательного и вращательного движений.
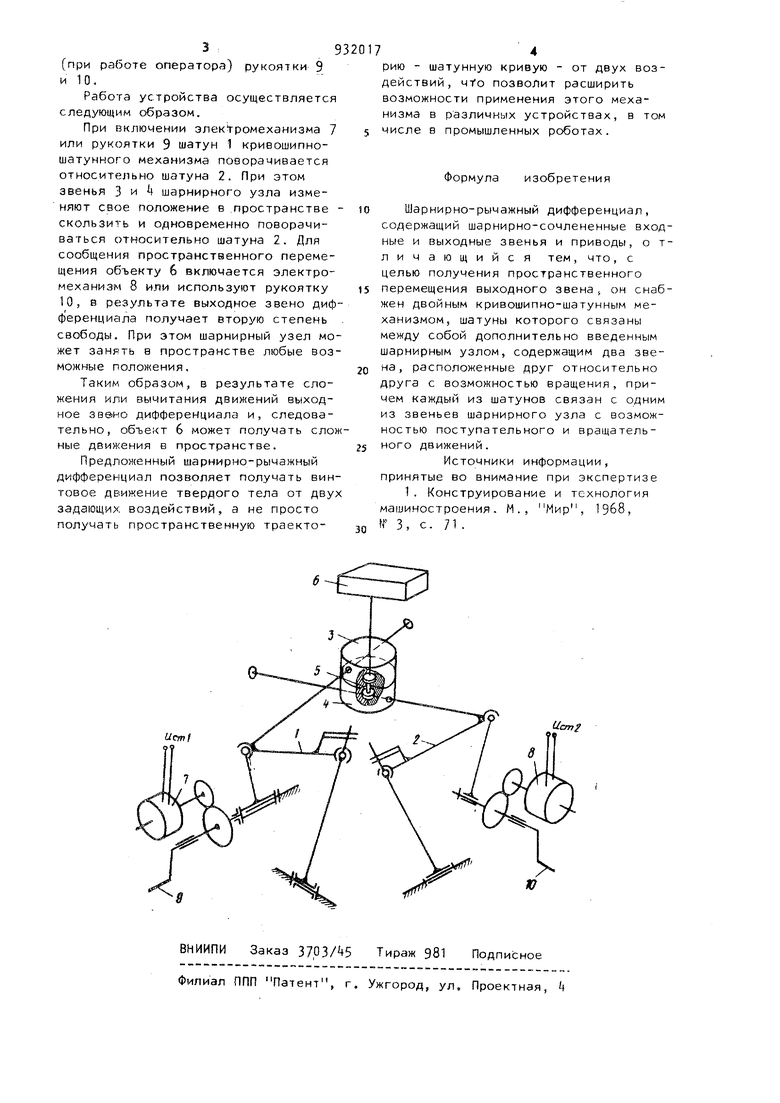
На чертеже показана кинематичес10кая схема шарнирно-рычажного дифференциала .
Дифференциал содержит сдвоенный кривошипно-шатунный механизм, шатуны 1 и 2 которого связаны между со15бой шарнирным узлом, имеющим звенья 3 и , расположенные друг относительно друга с возможностью вращения, так как они связаны вращательной парой 5. Выходное звено диффегоренциала , которым в частном случае может быть звено 3, связано с объектом 6. В качестве приводов используются электромеханизмы 7 и 8 или
