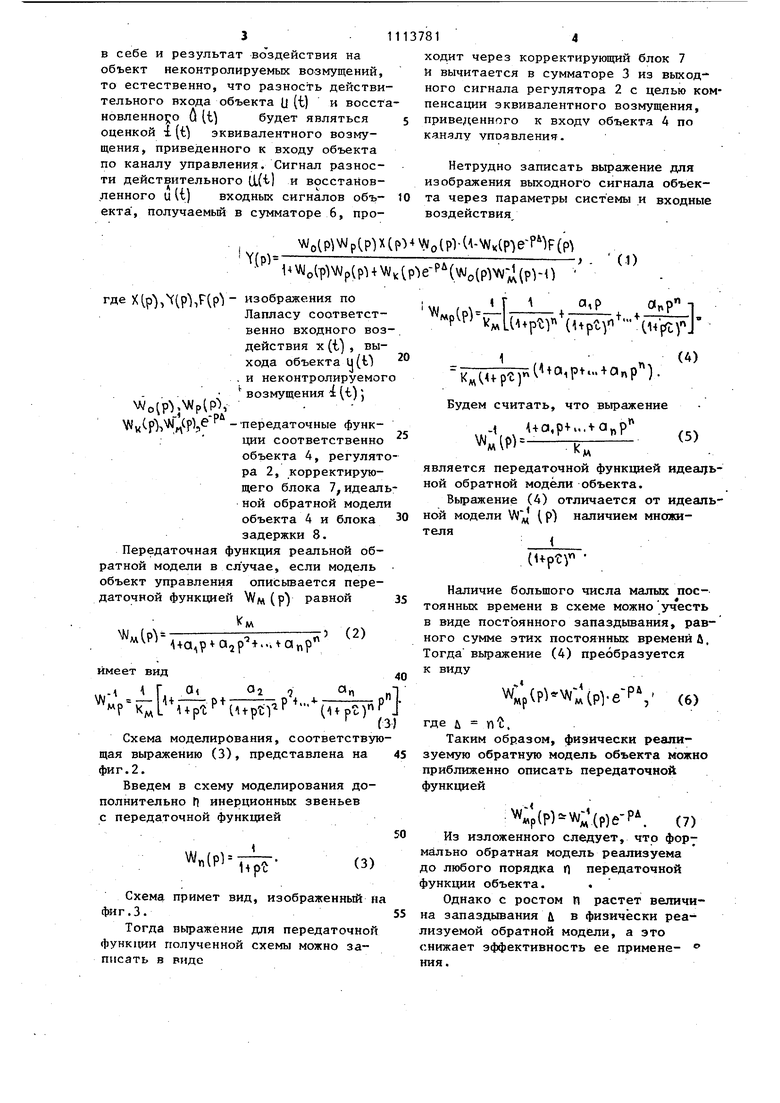
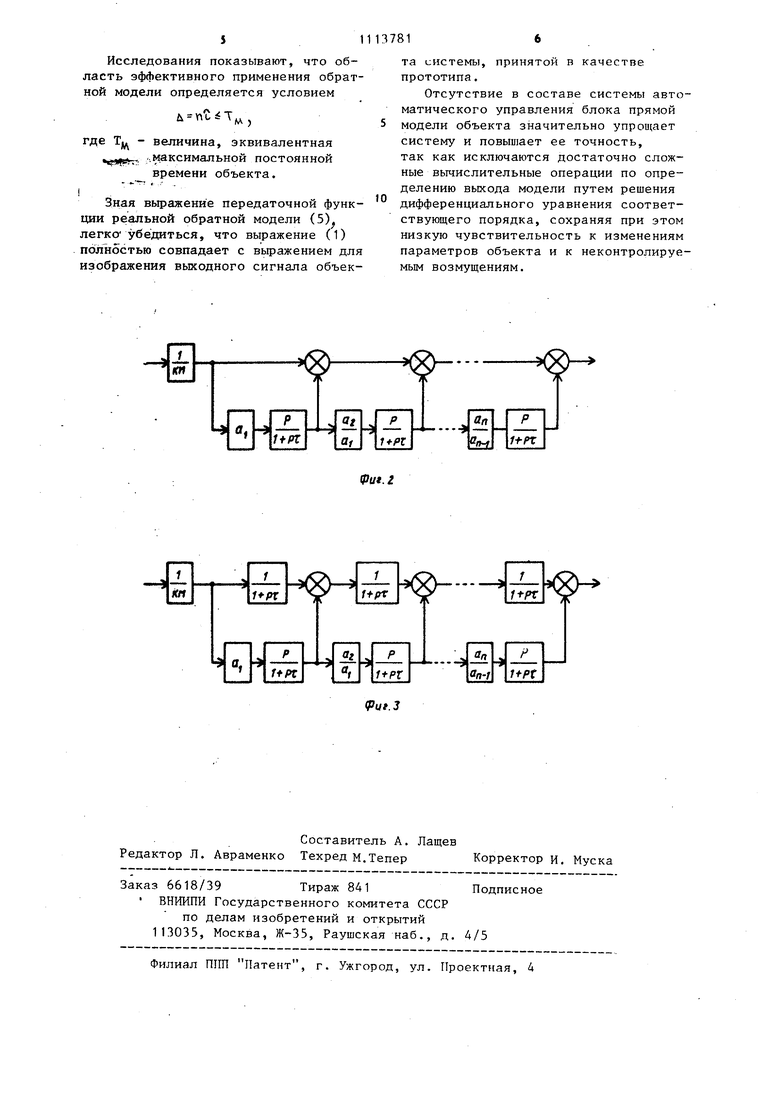
Изобретение относится к системам автоматического управления и может. найти применение при управлении объектами с переменными параметрами и неконтролируе№ ми возмущениями. Известна система автоматического управления, содержащая обратную моде объекта, посредством которой воСстанавливается выход объекта, отвечающий данному входу при отсутствии неконтролируемых возмущений и , Эта система имеет низкую чувствительность к изменениям параметров объектов и к неконтролируемым возмущениям, является достаточно просто и точной системой, однако при структурной неадекватности объекта и модели становится неустойчивой. Кроме того, (и это главное) названная сист ма является .системой идеальной, физически не реализуемой ввиду того, что выходной сигнал обратной модели (которая при отсутствии блока задерж ки является идеальной, физически не реализуемой), являясь сигналом идеальным, физически не реализуемым, используется в вычислениях совместно с реальными сигналами, поступая на первый вход третьего сумматора. Наиболее близкой к предлагаемой является система автоматического управления, которая содержит модель объекта управления и последовательно соединенные первый сумматор, регулятор, второй сумматор, выход которо го соединен с одним из входов, а также последовательно соединенные тр тий сумматор, обратную модель объект управления, корректирующее з«ено и четвертый сумматор, вход которого соединен е выходом регулятора, авыходчерез модель объекта регулирования с одним из входов третьего сумматора другой вход которого соединен с выхо дом объекта управления, выход обратной модели управления соединен с одним из входов второго сумматора. (; Известная система автоматического управления имеет прямую и обратную модели объекта. Посредством прямой модели объекта рассчитывается выход объекта без учета действующих на объект неконтролируемых возмущений. Сигнал разности выходов модели и объ екта приводится посредством обратной модели к входу объекта по каналу управления с целью компенсации неконтроли руемых возмущений 2 . 812 Эта система характеризуется низкой чувствительностью к изменению параметров объекта и к неконтролируемым возмущениям, является системой устойчивой в случае структурной неадекватности объекта управления и его модели, однако является сложной системой и имеет недостаточно высокую точность. Цель изобретения - упрощение системы и повышение ее точности. Указанная цель достигается тем, что В систему автоматического управления, содержащую последовательно сое-; диненные первый сумматор, регулятор, второй сумматор, объект управления блок обратной модели объекта, третий сумматор и корректирукиций блок, выход которого соединен с вычитающим входом второго сумматора, выход объекта управления соединен с вычитающим входом первого сумматора, введен блок задержки, вход которого подключен к выходу второго сумматора, а выход к вычитающему входу третьего сумматора . На фиг.1 представлена структурная схема предлагаемой системы, на фиг.2и фиг.З - варианты реализации обратной модели. Схема включает первьш сумматор 1 регулятор 2, второй сумматор 3. объект управления А, физически реализуемую обратную модель 5 объекта, третий сумматор 6, корректирующий блок 7 блок задержки 8, вход которого подключен к выходу второго сумматора 3 и входу объекта 4, выходной сигнал которого с обратным знаком поступает на второй вход первого сумматора 1j а выходной сигнал третьего сумматора 6 через корректирующий блок 7 поступает с обратным знаком на второй вход второго сумматора 3, на первый вход первого сумматора поступает задающее воздействие x(-(),u(i)- выход объекта управления 4; Up(i) - выход регулятора 2;(ji(t)- вход объекта управления 4J i(il возмущающее воздействие (неконтролируемое возмущение)i U (i) оценка входа объекта (восстановленный вход объекта). Система автоматического управления работает следующим образом. Входной сигнал объекта управления 4 восстанавливается из выходного сигнала y(-t) посредством физически реализуемой обратной 5 объекта 4. Поскольку сигнал Ц (t) содержит
3 1
в себе и результат воздействия на объект неконтролируемых возмущений, то естественно, что разность действительного входа объекта U (t) и восста новленно5:о б It) будет являться оценкой i (t) эквивалентного возмущения, приведенного к входу объекта по каналу управления. Сигнал разности действительного (l(t) и восстановленного U (i) входньк сигналов объекта, получаемьм в сумматоре 6, проWoiP p(P)xCpVWo(pl(()F(p
Y,(P)
(-p)NNp(pUNW,((No((p)4) где ,(PliP(pV изображения по Лапласу соответственно входного воз действия X (t) , выхода объекта Ц (О . и неконтролируемог возмущения i (t) NVotP,NplPV передаточные функции соответственно объекта 4, регулят ра 2, корректирующего блока 7, идеал ной обратной модел объекта 4 и блока задержки 8. Передаточная функция реальной обратной модели в случае, если модель объект управления описывается передаточной функцией WM(P) равной ,.с,,р.„..с, Имеет вид ..-А Г О 2 7 -р--i b V т У Схема моделирования, соответствую щая выражению (3), представлена на фиг.2. Введем в схему моделирования дополнительно Ц инерционных звеньев с передаточной функцией W(p) Схема примет вид, изображенный н фиг.З. Тогда вьфажение для передаточной функции полученной схемы можно записать в виде
1137814
ходит через корректирующий блок 7 и вычитается в сумматоре 3 из выходного сигнала регулятора 2 с целью компенсации эквивалентного возмущения, 5 приведенного к входу объекта 4 по каналу упоавления.
Нетрудно записать выражение для изображения выходного сигнала объек10 та через параметры системы и входные воздействия
(1) Г INW Ч -- -lll-. OfP 1 .рг1« (uptf- WJ 1„ (4) к ир-гг Р ) Будем считать, что вьфажение , ио.рь. w«iP) является передаточной функцией идеал ьной обратной модели объекта. Выражение (4) отличается от идеальной модели А д ( р) наличием множителя (u Наличие большого числа малых постоянных времени в схеме можноучесть в виде постоянного запаздьшания, равного сумме этих постоянных времени и, Тогда выражение (4) преобразуется к виду (PVeP (6) где U nt;. Таким образом, физически реализуемую обратную модель объекта можно приближенно описать передаточной функцией (Р){Р)е-Р (7) Из изложенного следует, что фору мально обратная модель реализуема до любого порядка о передаточной функции объекта. . Однако с ростом п растет величина запаздывания Ь в физически реализуемой обратной модели, а это снижает эффективность ее примене- ния.
Исследования показывают, что область эффективного применения обратной модели определяется условием
ii
)
где Тц - величина, эквивалентная
...„jj-.,, ...максимальной постоянной времени объекта.
I
Зная вьфажение передаточной функции реальной обратной модели (5) легко убедиться, что выражение (1) полностью совпадает с выражением для изображения выходного сигнала объекта системы, принятой в качестве прототипа.
Отсутствие в составе системы автоматического управления блока прямой модели объекта значительно упрощает систему и повышает ее точность, так как исключаются достаточно сложные вычислительные операции по определению выхода модели путем решения дифференциального уравнения соответствующего порядка, сохраняя при этом низкую чувствительность к изменениям параметров объекта и к неконтролируемым возмущениям.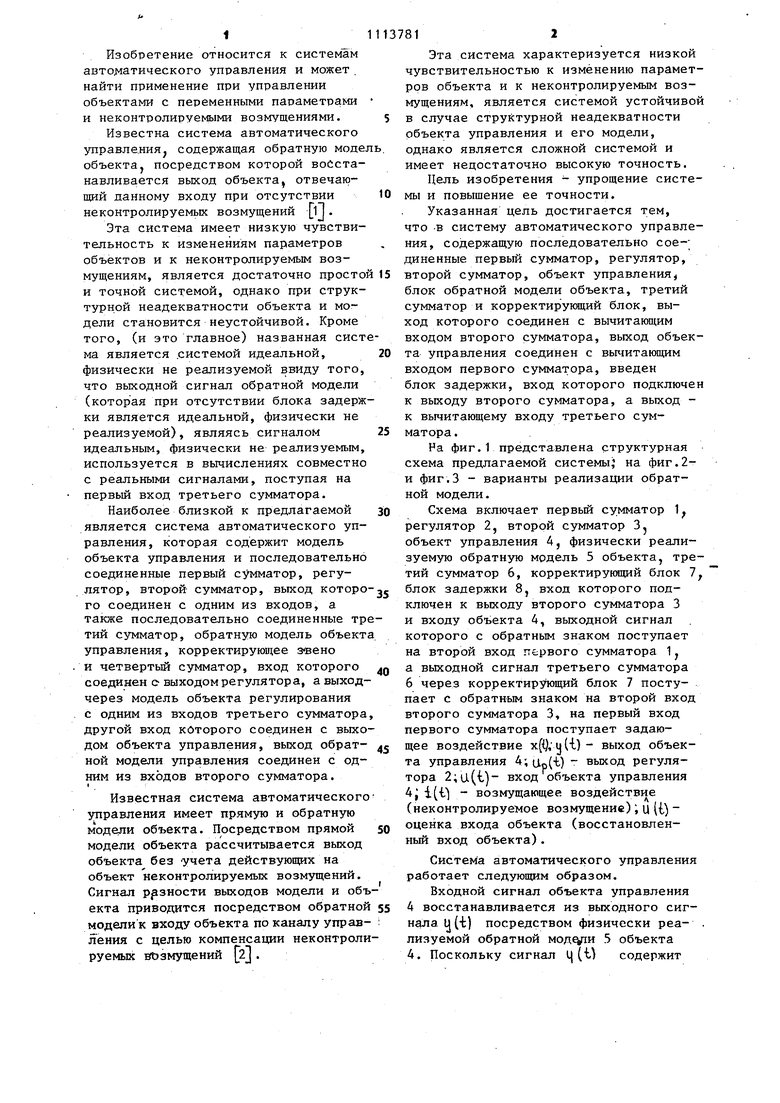
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Система автоматического управления | 1977 |
|
SU591821A1 |
| Система автоматического управления | 1979 |
|
SU824142A2 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, содержащая последовательно соединенные первый сумматор,регулятор, второй сумматор, объект управления, блок обратной модели объекта, третий сумматор и корректирующий блок, выход которого соединен с вычитающим входом второго сумматораj выход объекта управления соединен с вычитающим входом первого сумматора, отличающаяся тем, что, с целью упрощения и повышения точности системы, она содержит блок задержки, вход которого подключен к выходу второго сумматора, а выход - к вычитающему входу третьего сумматора. (Л
J .
art
....
Ом
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления | 1979 |
|
SU832529A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического управления | 1979 |
|
SU824142A2 |
| G, 05 В 17/02, 1981 (прототип). | |||
