0 -- ,, - ,2 -- ,J
е ей и
гв
§
(Л
-- ,, - ,2 -- ,J
е ей и
со
СХ)
со
СХ)
Изобретение относится к машиностроению и может быть использогано в промыш- .ленных роботах.
Цсм1,к) изобретения является новын1е- нио быстроде11стиия и точности за счет улуч- Н1ения динамических характеристик.
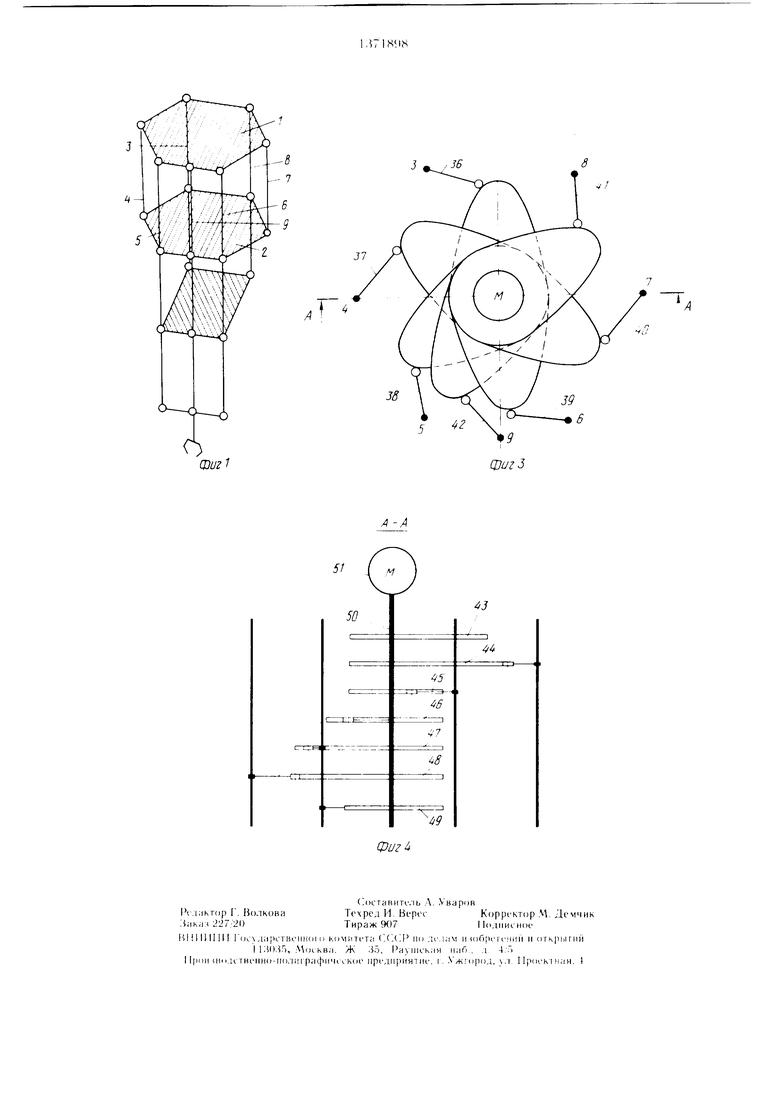
На фиг. 1 изображен манипулятор, об ший вид; на фиг. 2 -- кинематическая с.хе- ia манинулягора; на фиг. 3 - схема ку- . 1ачков()1 о механизма; на фиг. 4 - сечение .Л-.Л на фиг. 3.
Манипулятор состоит из тре.х модулей нодвижности. Первый модуль содержит входную траверсу 1 и выходную траверсу 2, соединенные между собой посредством основных и доиолнительного стержней 3 9 равной д., снабженных на конца.х Hiap- нирами Гука ( словно ноказаны в виде iiia- ровьгх иар).(/гержни 4, 5, 6,7 и 9 снабжены на концах Н1арннрами Гука, так что входные К) 14 и выходные 15 - 19 вилки Hiap- ниров Гука шарнирно установлены на в.ход- ной 1 и выходной 2 траверсах. Вилки 20 и 21, а также ви.чки 22 и 23, входящие в niap- нн1)ы Гука стержней 3 и 8, неподвижно за- кренлены на входной и выходной траверсах, а К1)ест()ви){ы 24 и 25 снабжены жестко закрен.менными на )1их конически.мн зубча- 11)1ми Ko.iecaMH 26 и 27. входящими в за- нен.юнне с приводными коническими зубча- К(), кч ами 28 и 21.
8 соединены со стержнямн
нлки 16 |11а|1нир()в Гука ду.1Я аналслично том. как ки II li со стержнями Г). мод. 1я. Вьгходные вилки
со 6 5 и
другом конпе конические зуочатые колеса 31), 31, входящие в зацепление с коническими зубчатыми колесами 32 и 33, жестко устаноЕ ленными на кресговпнах Н1арниров стер; Кней 34 и 35. Ana.i( выполнен jpcTiiii модуль.
Привод вилок И) 14,а также колес 28 н 29 осу пеств. 1яется посредством кулачкового механизма (фиг. i3). Входные вилки 10 14, а также Ko. ieca 28 и 29 снабжены толкателямн 36 42, взанмодействуюн1ими с ку. 1ачками 43 49, жестко ;1акрег1ленными на приводном валу 50 двигате. ш 51 (фиг. 4).
0
5
0
5
0
5
0
5
Манигн лятор работает с. 1едуюши.м образом.
При включении двиг ателя 51 происходит поворот вала 50 с закрепленными на нем кулачками 43 - 49. Кулачки, взаимодействуя с толкателями 36-42, новорачивают входные вилки 10 14 и колеса 28 и 29 по закону. о |ределен)юму профилем кулачков. Конические колеса 28 и 29 передают движение колесам 26 и 27, а те новорачивают стержни 3 и 8. тем самым определяя конфигурацию ведущего модуля. При этом стержни 4- 7,9 в силу указанного конструктивного исполнения все время остаются параллельными между собой. Стержни 4 и 7 че- рех конические колеса 30 и 31, а также 32 и 33 сообщают движение ведомому модулю. Аналогично происходит привод третьегх) мо дуля.
Формула изобретения
1.Мапипулятор, содержащий двигатель с нрив(;дны.м валом, и ведомый подвижные модули, каждый из которых имеет входную и выходную траверсы, причем траверсы 11оследовате;1ьно соединены между собой основны.ми стержня.ми равной д.чины, на конпах которых установлены основные нарниры Гука, отличающийся тем, что, с целью повьинения быстродействия и точности за счет улуч1нения динамических характеристик, каждый нодвижный модуль снабжен дополнительным стержнем, длина которого равна длине основног о стержня, связанным с входной и выходной траверсами iToro модуля носредством дополнительных П1арниров Гука. один из которых посредством дополнительно введенной конической зубчатой передачи, установленной на взаимно перпендикулярных осях этого щар- нира. связан с ведомым подвижным модулем.
2.Манипулятор по н. 1, отличающийся тем, чпо он снабжен кулачковым .механизмом, при этом двигатель с приводным валом расположен внутри подвижного модуля и на валу жестко закренлены кулачки механизма, а толкатели кулачкового механизма жестко установ.тены на основных н дополпительном стержнях .модуля.
фиг
J . / 6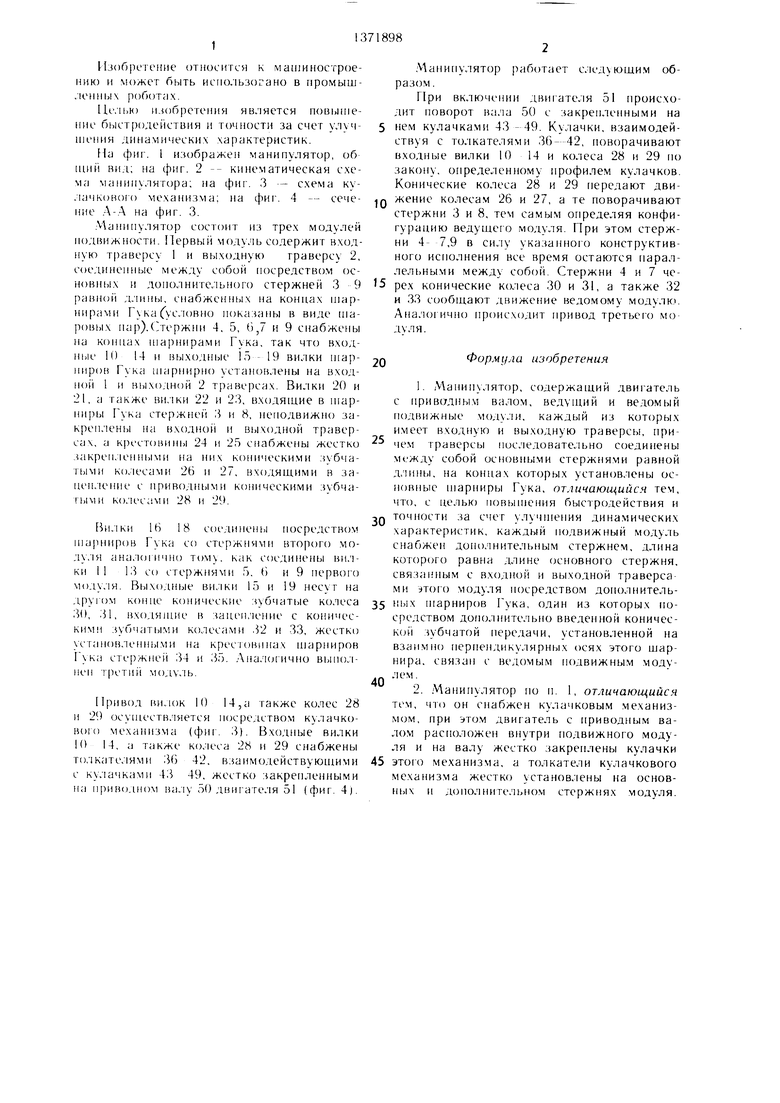
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1411131A1 |
| Устройство для ориентации захвата манипулятора | 1987 |
|
SU1445958A1 |
| Инвалидная коляска | 1990 |
|
SU1794449A1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| КУЛИСНЫЙ КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ ВЫСОКОМОМЕНТНОГО ВАРИАТОРА НЕФРИКЦИОННОГО ТИПА | 2022 |
|
RU2788238C1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Гайковерт | 1989 |
|
SU1685698A1 |
| Приспособление для обработки глобоидальных кулачков | 1976 |
|
SU667338A1 |
Изобретение относится к машиностроению и может быть использовано в нромьпн- ленных роботах. Целью изобретения является повышение быстродействия и точности за счет улучшения динамически.х характеристик. При врашении приводного вала двигателя через кулачковый ме.ханизм осуществляется поворот входных вилок 10-14 и конических зубчатых колес 28 и 29, установленных в ведущем модуле на входной траверсе 1, по закону, определенному профилем кулачков. В свою очередь конические зубчатые колеса 27 и 26, запепляющие- ся с ко.1есами 28 и 29, поворачивают стержни 8 и 3, тем самым определяя конфигура- пию ведущего модуля. Стержни 4 и 7, поворачиваясь, через конические зубчатые колеса 30 и 31 и 32 и 33 сообщают движение ведомому модулю. Аналогично происходит привод следуюпАего модуля. 1 з.п. ф-лы, 4 ил.
51
50
3
5
6 ±т
7
8
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
