(21)4184201/25-08
(22)21.01.87
(46) 23.12.88. Бюл. № 47
(75) Л. А. Борисенко и В. Л. Комар
(53)62-229-72(088.8)
(56)Авторское свидетельство СССР № 555008, кл. В 25 J 17//00, 1976.
(54)УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ЗАХВАТА МАНИПУЛЯТОРА
(57)Изобретение относится к машиностроению и может быть использовано в манипуляторах. Цель изобретения - повышение точности программного движения. Устройство содержит основание 1, траверсу 2, шарнирно соединенные между собой параллельными стержнями 3, 4, 5 равной длины. Стержень 3 имеет захват, снабженный шарниром Гука 6, вилка 7 которого шарнирно установлена на
/г 74 15
основании 1 и несет коническое колесо 22. Стержень 4 снабжен шарниром Гука 8, вилка 9 которого жестко закреплена на основании 1, а крестовина 20 несет коническое колесо 23. Стержень 5 снабжен шарниром Гука 10, вилка 11 которого жестко закреплена на основании 1, а крестовина 21 снабжена коромыслом 18. К основанию 1 прикреплен механизм поворота стержня 3 в виде быстросменного кулачкового распределительного вала 12 с кулачками 13, 14, 15, связанными с коромыслами 17, 18, 19. На оси 26 свободно установлены конические зубчатые колеса 24 и 25, взаимодействуюшие с колесами 22 и 23 и жестко связанные с коромыслами 19 и 17, взаимодействуюш,ими с кулачками 15 и 13. Распределительный вал 12 снабжен двигателем 16. 1 з.п. ф-лы,, 1 ил.
(@
сл
и СП
о сл
00
;j /7
16
Изобретение относится к машиностроению, а именно к манипуляторам с автоматическим управлением с точным воспроизведением программного движения, например к манипуляторам роботов для сварки.
Целью изобретения является повышение точности программного движения.
На чертеже представлена кинематическая схема предлагаемого устройства.
Устройство содержит основание 1, траверсу 2, шарнирно соединенные между собой тремя параллельными стержнями 3-5 равной длины. Стержень 3, имеющий захват, снабжен шарниром Гука 6, вилка 7 которого шарнирно установлена-на основании 1. Стержень 4 снабжен шарниром Гука 8, вилка 9 которого жестко закреплена на основании 1. Стержень 5 снабжен шарниром Гука 10, вилка 11 которого жестко закреплена на основании 1.
Устройство снабжено механизмом поворота стержня 3, несущего захват, прикрепленным к основанию 1 и выполненным в виде быстросменного распределительного вала 12 с тремя кулачками 13-15, связанного с электродвигателем 16, и тремя коромыслами 17-19, контактирующими с соответствую щими кулачками 13-15.
Вилка 7 кинематически связана с коромыслом 19 механизма поворота, вилки 9 и 11 шарниров Гука 8 и 10 стержней 4 и 5 жестко связаны с основанием 1, их крестовины 20 и 21 кинематически связаны соответственно с коромыслами 17 и 18.
Кинематические связи вилки 7, шарнирно установленной на основании 1 с коромыслом 19 механизма поворота, и крестовина 20 с коромыслом 17 выполнены в виде конических зубчатых пар, одни зубчатые колеса 22 и 23 которых закреплены соответственно на вилке 7 и крестовине 20, а другие (24 и 25) свободно установлены на оси 26 и жестко связаны с соответствующими коромыслами 19 и 17. Крестовина 21 шарнира Гука стержня 5 свободно установлена на оси 26 и жестко связана с коромыслом 18.
Устройство работает следуюшим образом
При включении двигателя 16 коромысла 19 и 17 под воздействием кулачков 15 и 13
10
15
20
25
30
35
40
45
поворачиваются и сообщают через конические зубчатые колеса 24, 25, 22 и 23 движение стержням 3 и 4. Стержень 5 получает движение под воздействием коромысла 18 Распределительный вал 12 выполнен быстро- съемным, что обеспечивает возможность быстрой смены программы. Привод от кулачков обеспечивает точное воспроизведение программного движения не только по координатам, но и по скорости.
Формула изобретения
1.Устройство для ориентации захвата манипулятора, содержащее по крайней мере три параллельно установленных стержня равной длины, одним концом связанных через шарниры с основанием, а другим - с траверсой, и механизм поворота стержня, несущего захват, отличающееся тем, что, с целью повышения точности программного движения, шарниры, связывающие концы стержней с основанием, выполнены в виде шарниров Гука, механизм поворота выполнен в виде распределительного вала с тремя кулачками, связанного с электродвигателе.м, и трех коромысел, контактирующих с соответствующими кулачками, при этом одна из вилок шарнира Гука стержня, несущего захват шарнирно установлена на основании и кинематически связана с первым коромыслом механизма поворота, одни из вилок шарниров Гука второго и третьего стержней жестко связаны с основанием, а их крестовины кинематически связаны соответственно со вторым и третьим коромыслами.
2.Устройство по п. 1, отличающееся тем, что кинематические связи вилки, шар- нирно установленной на основании, с первым коромыслом, механизма поворота и крестовины шарнира Гука второго стержня с вторым коромыслом выполнены в виде конических зубчатых пар, одни зубчатые колеса которых закреплены соответственно на вилке и крестовине, другие свободно установлены на оси и жестко связаны с соответствующими коромыслами, а крестовина шарнира Гука третьего стержня свободно установлена на оси, несущей зубчатые колеса, и жестко связана с третьим коромыслом.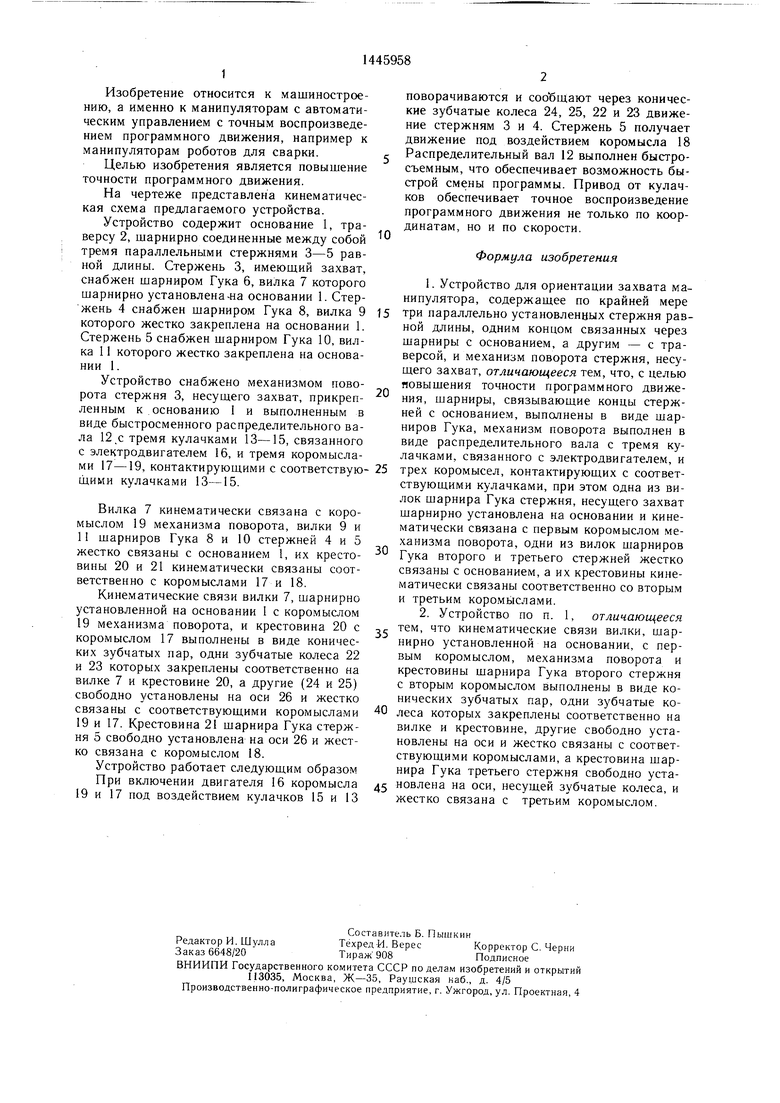
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1411131A1 |
| Манипулятор | 1990 |
|
SU1759619A1 |
| Привод манипулятора | 1982 |
|
SU1050862A2 |
| Привод манипулятора | 1982 |
|
SU1114544A2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1986 |
|
SU1371898A1 |
| Устройство для формированияиздЕлий "МюзлЕ | 1977 |
|
SU816637A1 |
| Шарнир манипулятора | 1990 |
|
SU1756147A1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |

