t/
8 9
(Л
/-
7 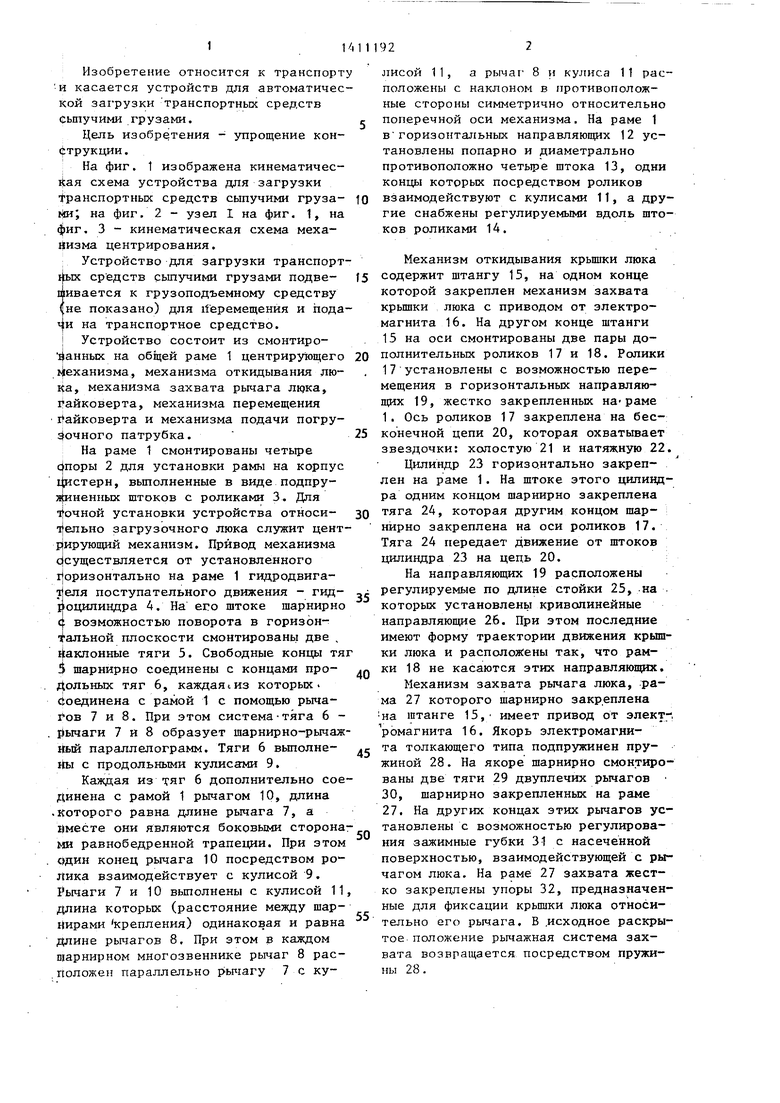

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| Устройство для загрузки транспортных средств сыпучими грузами | 1985 |
|
SU1511167A1 |
| УСТРОЙСТВО ДЛЯ РАССТЫКОВКИ РЕЛЬСОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1999 |
|
RU2180027C2 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Гайковерт | 1989 |
|
SU1650422A1 |
| МАНИПУЛЯТОР-УКЛАДЧИК ФОРМ | 1992 |
|
RU2037410C1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Устройство для изготовления обрезиненного кордного полотна | 1973 |
|
SU539510A3 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |

фиг.3
Изобретение относится к транспорт -и касается устройств для автоматической загрузки транспортных средств Сьтучими грузами.
Цель изобретения - упрощение кон- фтрукции.
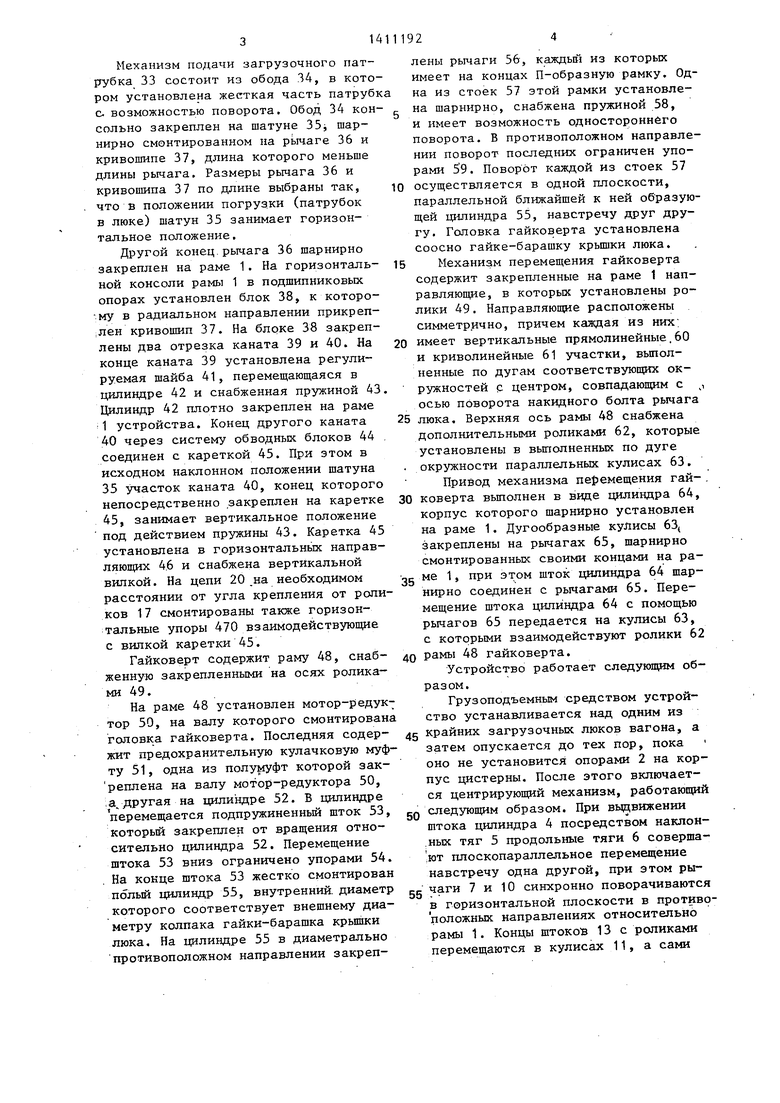
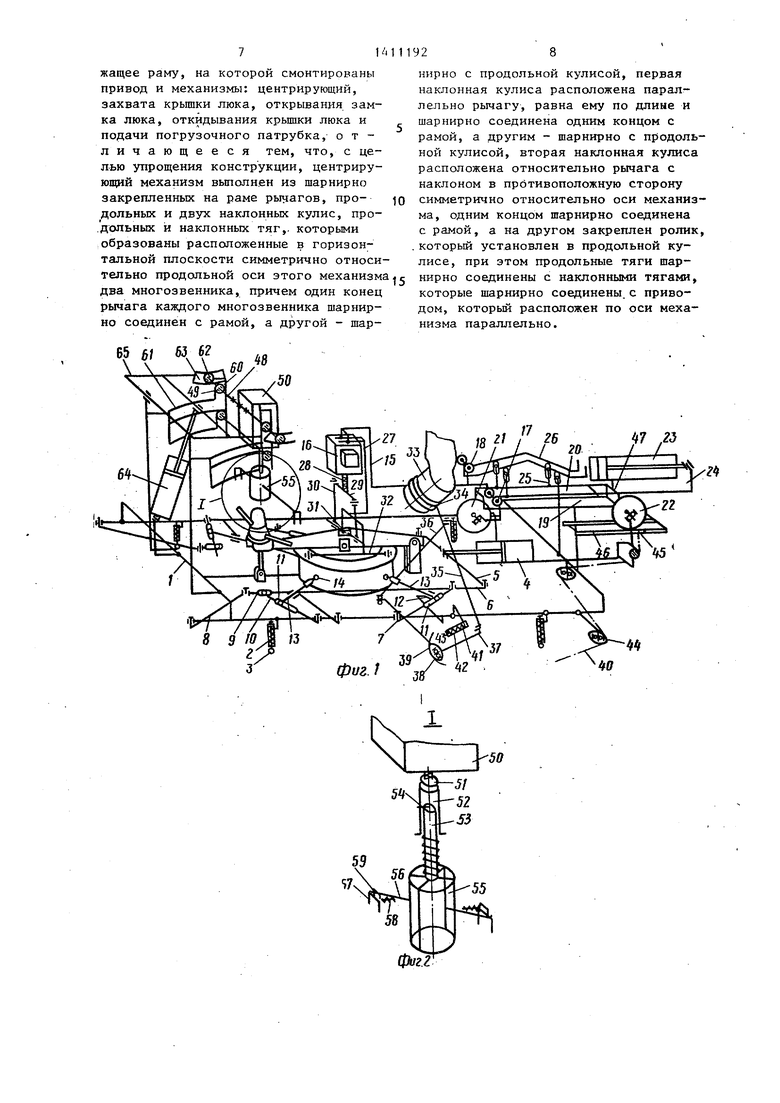
На фиг. 1 изображена кинематичес- йая схема устройства для загрузки транспортных средств сыпучими груза- на фиг. 2 - узел 1 на фиг. 1, на фиг. 3 - кинематическая схема механизма центрирования.
Устройство Для загрузки транспорт йьк средств сыпучими грузами подвешивается к грузоподъемному средству показано) для 11еремещения и пода |и на транспортное средство. Устройство состоит из смонтиро- анных на общей раме 1 центрирующего Механизма, механизма откидывания люка, механизма захвата рычага , 11 айковерта, механизма перемещения 1 айковерта и механизма подачи погру- очного патрубка.
На раме 1 смонтированы четыре споры 2 для установки рамы на корпус tpCTepH, выполненные в виде подпру- яиненных штоков с роликами 3. Для т очной установки устройства относи- 1|ельно загрузочного люка служит цент 1:|ирующий механизм. Привод механизма с|существляется от установленного 1 оризонтально на раме 1 гидродвигателя поступательного движения - гид- 1юцш1индра 4. На его штоке шарнирно с; возможностью поворота в горизон- альной плоскости смонтированы две , аклонные тяги 5. Свободные концы тя 5 шарнирно соединены с концами продольных тяг 6, каждая из которых- Соединена с рамой 1 с помощью рыча- 7 и 8. При этом система-тяга 6 - рычаги 7 и 8 образует шарнирно-рычаж Ный параллелограмм. Тяги 6 выполне- itbi с продольными кулисами 9.
Каждая из тяг 6 дополнительно соединена с рамой 1 рычагом 10, длина .которого равна длине рычага 7, а Имеете они являются боковыми сторона JИ равнобедренной трапехщи. При этом Один конец рычага 10 посредством ролика взаимодействует с кулисой 9. Рычаги 7 и 10 выполнены с кулисой 11 длина которых (расстояние между шар- йирами крепления) одинаковая и равна длине рычагов 8. При этом в каждом Б1арнирном многозвеннике рычаг 8 рас- , положен параллельно р ьгаагу 7с куO
5
0
5
0
5
0
5
0
5
лисой 11, а рычаг 8 и кулиса 1 1 расположены с наклоном в противоположные стороны симметрично относительно поперечной оси механизма. На раме 1 В горизонтальных направляющих 12 установлены попарно и диаметрально противоположно четыре штока 13, одни концы которых посредством роликов взаимодействуют с кулисами 11, а другие снабжены регулируемыми вдоль штоков роликами 14.
Механизм откидывания крышки люка содержит штангу 15, на одном конце которой закреплен механизм захвата крьш1ки люка с приводом от электромагнита 16. На другом конце штанги 15 на оси смонтированы две пары дополнительных роликов 17 и 18. Ролики 17 установлены с возможностью перемещения в горизонтальных направляющих 19, жестко закрепленных на-раме 1. Ось роликов 17 закреплена на бесконечной цепи 20, которая охватывает звездочки: холостую 21 и натяжную 22.
Цилиндр 23 горизонтально закреплен на раме 1. На штоке этого цилиндра одним концом шарнирно закреплена тяга 24, которая другим концом шарнирно закреплена на оси роликов 17. Тяга 24 передает движение от штоков цилиндра 23 на цець 20.
На направляющих 19 расположены регулируемые по длине стойки 25, на которых установлен криволинейные направляющие 26. При этом последние имеют форму траектории движения крышки люка и расположены так, что рамки 18 не касаются этих направляющих.
Механизм захвата рычага люка, рама 27 которого шарнирно закреплена на штанге 15, имеет привод от элект-, омагнита 16. Якорь электромагнита толкающего типа подпружинен пружиной 28. На якоре шарнирно смонтированы две тяги 29 двуплечих рычагов 30, шарнирно закрепленных на раме 27. На других концах этих рычагов установлены с возможностью регулирования зажимные губки 31 с насеченной поверхностью, взаимодействующей с рычагом люка. На раме 27 захвата жестко закреплены упоры 32, предназначенные для фиксации крьш1ки люка относительно его рычага. В .исходное раскрытое положение рычажная система захвата возвращается посредством пружины 28.
Механизм подачи загрузочного патрубка 33 состоит из обода 34, в котором установлена жесткая часть патрубк с. возможностью поворота. Обод 34 кон- сольно закреплен на шатуне 35j шар- нирно смонтированном на рьтчаге 36 и кривошипе 37, длина которого меньше длины рычага. Размеры рычага 36 и кривошипа 37 по длине выбраны так, что в положении погрузки (патрубок в люке) шатун 35 занимает горизонтальное положение.
Другой конец, рычага 36 шарнирно закреплен на раме 1. На горизонталь- ной консоли рамы 1 в подшипниковых опорах установлен блок 38, к которому в радиальном направлении прикреп;лен кривошип 37. На блоке 38 закреплены два отрезка каната 39 и 40. На конце каната 39 установлена регулируемая шайба 41, перемеш1ающаяся в цилиндре 42 и снабженная пружиной 43. Цилиндр 42 плотно закреплен на раме
:1 устройства. Конец другого каната 40 через систему обводных блоков 44 . соединен с кареткой 45. При этом в исходном наклонном положении шатуна 35 участок каната 40, конец которого непосредственно закреплен на каретке 45, занимает вертикальное положение под действием пружины 43. Каретка 45 установлена в горизонтальных направляющих 4.6 и снабжена вертикальной вилкой. На цепи 20 ,на необходимом расстоянии от угла крепления от роликов 17 смонтированы также горизонтальные упоры 470 взаимодействующие с вилкой каретки 45.
Гайковерт содержит раму 48, снаб- женную закрепленными на осях роликами 49.
На раме 48 установлен мотор-редуктор 50, на валу которого смонтирована головка гайковерта. Последняя содер- жит предохранительную кулачковую муфту 51, одна из полумуфт которой зак реплена на валу мотор-редуктора 50, а, другая на цилиндре 52. В цилиндре перемещается подпружиненный шток 53, которьй закреплен от вращения относительно цилиндра 52. Перемещение штока 53 вниз ограничено упорами 54. На конце штока 53 жестко смонтирован полый цилиндр 55, внутренний, диаметр которого соответствует внешнему диаметру колпака гайки-барашка крьшки люка. На цилиндре 55 в диаметрально противоположном направлении закреплены рычаги 56, каждый из которых имеет на концах П-образнуш рамку. Одна из стоек 57 этой рамки установлена шарнирно, снабжена пружиной 58, и имеет возможность одностороннего поворота. В противоположном направлении поворот последних ограничен упорами 59. Поворот каждой из стоек 57 осуществляется в одной плоскости, параллельной ближайшей к ней образующей цилиндра 55, навстречу друг другу. Головка гайковерта установлена соосно гайке-барашку крьш1ки люка.
Механизм перемещения гайковерта содержит закрепленные на раме 1 направляющие, в которых установлены ролики 49. Направляющие расположены симметрично, причем каждая из них; имеет вертикальные прямолинейные,60 и криволинейные 61 участки, выполненные по дугам соответствующих окружностей е центром, совпадающим с осью поворота накидного болта рычага люка. Верхняя ось рамы 48 снабжена дополнительными роликами 62, которые установлены в выполненных по дуге окружности параллельных кулисах 63.
Привод механизма перемещения гайковерта выполнен в виде цилиндра 64, корпус которого шарнирно установлен на раме 1. Дугообразные куЛисы 63 закреплены на рычагах 65, шарнирно смонтированных своими концами на раме 1, при этом шток цилиндра 64 шарнирно соединен с рычагами 65. Перемещение штока цилиндра 64 с помощью рычагов 65 передается на кулисы 63, с которыми взаимодействуют ролики 62 рамы 48 гайковерта.
Устройство работает следующим образом.
Грузоподъемным средством устройство устанавливается над одним из крайних загрузочных люков вагона, а затем опускается до тех пор, пока оно не установится опорами 2 на корпус цистерны. После этого включается центрируюшдй механизм, работающий следующим образом. При выдвижении штока цилиндра 4 посредством наклон- .ных тяг 5 продольные тяги 6 соверша- ют плоскопараллельное перемещение навстречу одна другой, при этом рычаги 7 и 10 синхронно поворачиваются в горизонтальной плоскости в противоположных направлениях относительно рамы 1. Концы штокоь 13 с роликами перемещаются в кулисах 11, а сами
514
:Штоки 13 одновременно движутся навстречу один другому, совершая равны перемещения. Упорные ролики 14 взаи- модействуют с корпусом люка, тем са- мым центрируя устройство относительно загрузочного люка.
После этого производится подвод захвата рычага люка. В исходном по- ложении зажимные губки 31 закрыты, штанга 15 отведена от люка. При ЭТ9М она опирается роликами 18 на направ- ;ляюище 26 в положении максимального 1подъема зажима и электромагнитом 16, i Движение штока цилиндра 23 переда- ется тягой 24 на цепь 20, -и она .пере- |мещает ролики 17 в направляющих 19 jB крайнее, левое положение. Штанга 15 1вместе с захватом опускается. Упоры 32 взаимодействуют с крышкой люка, ограничивая опускание штанги 15.,Ролики 18 подняты над направляющими 26 При срабатывании электромагнита 16 происходит зажим крышек люка и одно- .временная ее фиксация относительно рычага.
Рама 48 опускается вместе с уста- новленньм на ней гайковертом. Цилиндр 55 окончательно центрирует головку гайковерта относительно гайки-бараш- 1ка. Движение рамы 48 происходит до момента контакта нижнего торца корпуса с .гайкой. При этом ролики 49 пере- мещаются только по вертикальным нап- |равляющим 60, а -ролики 62 перекаты- |ваются в кулисах 63, установленных 1на штоке цилиндра 64.
После опускания гайковерта осу- :ществляется отвинчивание гайки-баран - :ка. Цилиндр 55 вращается против часовой стрелки. Стойки 57s встречая на своем пути рук:оятки гайки, поворачиваются, а рычаги 56, продолжая вращение, поворачивают рукоятки гай- ки стойками П-образной рамки. Стойки 57 под действием пружин 58 возвращаются в вертикальное положение, В процессе отвинчивания гайки цилиндр 55 со штоком 53 поднимаются вверх отно сительно неподвижного щшиндра 52. Максимальная величина момента отвинчивания (завинчивания) га йки .регулируется предохранительной кулачковой муфтой 51. Головка гайковерта (гайка) совершает несколько оборотов, необ- ходимьгх; для откидывания болта с. навинченной гайкой от вилки рычага люка, например 10 оборотов. Шаг резьбы
Q ,. 0 5
Q
5
5
0
92 ,6
болта МЗО Р 25 мм, а вертикальное перемещение гайки 35 мм.
При этом необходимо, чтобы рукоятки г айки и рычага 56 в момент окончания отвинчивания заняли положение, перпендикулярное плоскости рычага люка.
Для откидывания накидного болта перемещение штока цилиндра 64 передается на кулисы 63. Ролики 49 перемещаются по дугообразным направляющим 61, а рама 48 с гайковертом поворачивается в вертикальной плоскости вокруг оси крепления накидного болта на необходимый угол. Гайка отводится от .вилки рычагом люка и не препятствует его подъему.
Подъем и откидывание рычага с люком производится захватом при движении штанги 15, При этом ролики 18 не касаются направляюш х 26,
Цепь 20 перемещает ролики,17 в горизонтальньк направляюш сх 19. Штан- г-а 15 поворачивается на оси рЪликов 17, а неподвижная система захват - рычаг люка - люк поворачивается отно- сительно шарнира крепления рычага люка. В конечной точке рычаг с люком занимают вертикальное положение.
По достижении необходимого пере-- закрепленные на цепи 20 упоры 47 входят во взаимодействие с вилкой каретки 45. Последняя перемещается в горизонтальных направляющих 46 одновременно с перемещением роликов 17; Закрепленный на каретке 45 канат 40 через систему обводных блоков 44 по-. ворачивает блок 38 с закрепленным на нем кривошипом 37, преодолевая силу сжимания пружины 43. Шатун 35 совершает сложное плоскопараллельное вдвижение, подавая погрузочный . патрубок 33 в положение над загрузоч- ньи люком вагона.
При этом шатун 35 оказывается в горизонтальном положении.
Погрузочньй патрубок 33 соединен гибким рукавом с магистралью пневмотранспорта цемента. После вьшолне- ний этих операций производится погрузка цемента в вагон. По окончании погрузки механизмы устройства пере- . водятся в исходные положения в порядке, обратном изложенному.
Формула изобретения
Устройство для загрузки транспорт- ньЕ-с средств сьптучими г-рузами, содер63 62
48
« ,0 f f
фаг.г
| Авторское свидетельство СССР Но заявке № 4014856/27-11, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
