ел
00 00
I Изобретение относится к измерительной технике.
Цель изобретения - повышение точности измерения параметров вибрации и движения твердых тел.
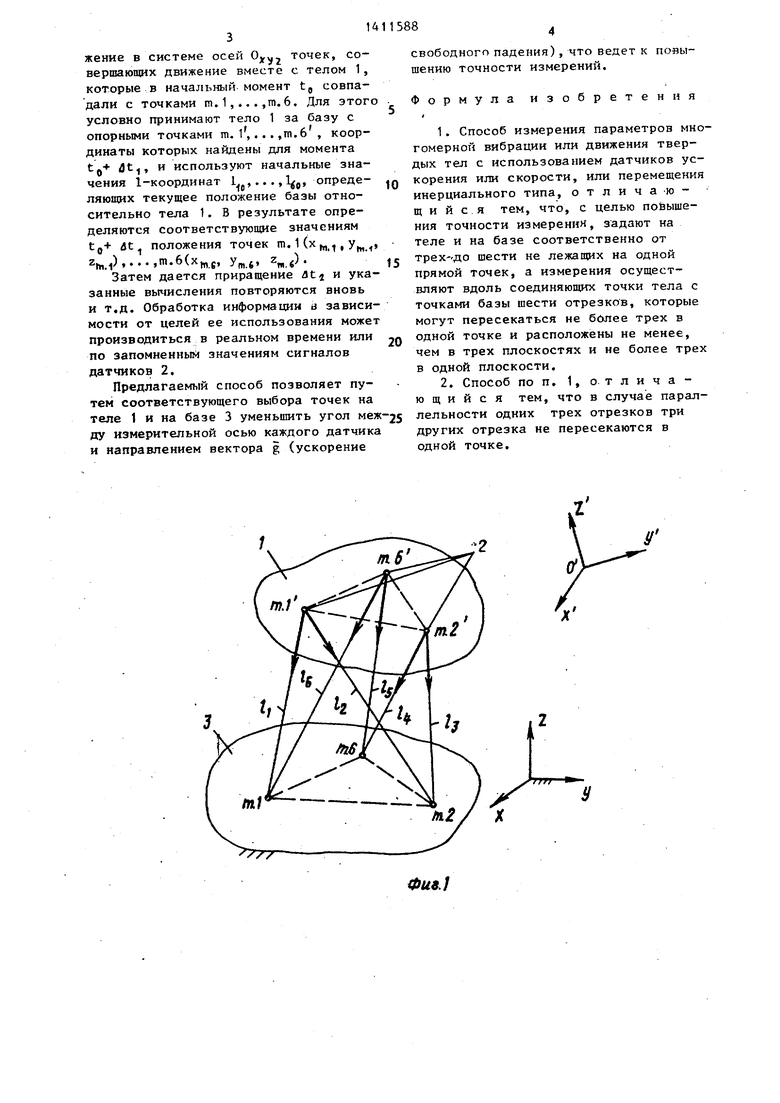
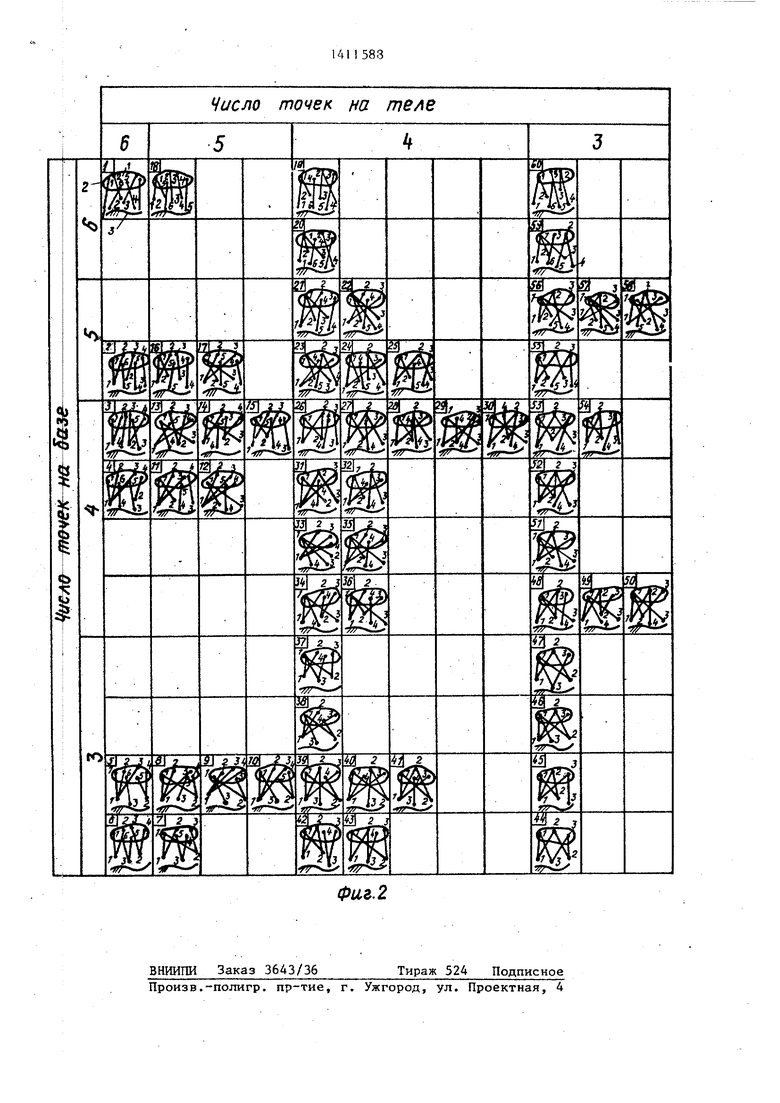
На фиг. 1 изображена схема измерения паргметров; на фиг. 2 - то же, варианты.
Способ осуществляют следующим об- разом.
Способ измерения параметров осноHi
H на описании положения и перемеще- 1я твердого тела в пространстве при мощи 1-координат - шести отрезков ,1,,...,, соединяющих точки тела точками неподвижной базы так, что 1И заданных значениях 1 ,1 j,... ,1 разуется геометрически неизменяет.1 ш. 1 J т. 2 га.2; т.б т.6;
1::
lc
т. I m. m. 2 m.6; га. б m. 1 .
1 ii,4,
(2) и (3) 1,1,..., и
соответственно проекции скоростей и ускорений точек тела 1 (фиг.1) i, и ii - точки m.l на отрезок т.1 т.1; 1j и 1 г точки т.1 на отрезок т.I m.2; 1, и Ij - точки т.2 на отрезок т.2 т.2; 14 и 14 - тонки т.2 на отрезок т,2 га.6; 1 . и ij - точки т.б на отрезок т.б т.6; 1, точки m.6 на отрезок га.6 m.l.
Расположив датчики 2 ускорения или скорости, или перемещения инерциаль- ного типа в точках 1 ,...,6 тела 1 и измеряя ускорения скорости или пере1 
Изобретение относится к измерительной технике. Целью изобретения является повышение точности измерения. Поставленная цель достигается тем, что выбирают на теле и на базе вне его соответственно от трех до шести не лежащих на одной прямой точек, связывают их аестью отрезками, не пересекающимися более трех в одной точке, лежащими не менее, чем в трех плоскостях и не более трех в одной плоскости, не пересекающихся трех в одной точке в случае параллельности трех других, при этом углы между отрезками должны быть возможно меньшими . Располагают на теле датчики ускорения или скорости, или перемещения инерциального типа так, чтобы их измерительные оси бьши ориентированы вдоль отрезков. Регистрируют показания датчиков. 1 з.п. ф-лы, 2 ил. i С/
1Я структура. В различных структурах 20 мещения вдоль соединяющих эти точки
м
1 координат на теле и на базе соот тственно может быть от трех до ш(«сти не лежащих на одной прямой то;к, а соединяющие их шесть отрезков могут пересекаться не более трех в 25 одной точке и расположены не менее,
эм в трех плоскостях и не более трех в одной плоскости. Кроме того, в случае параллельности трех отрезков три других отрезка не пересека- ЗО югся в одной точке. В 1-координатах уравнения движения свободного твердого тела имеют вид:
f/t); Ц- fi(t); 4 fstt);
тела 1 с точками 1,...,6 базы 3 шести отрезков га. l т. 1; m.l га. 2; т.2 т.2; ш.2 т.6; т.б ш.б; т.б га. t, определяют движение тела 1. Возможные схемы расположения датчиков на теле 1 и точек на базе 3 показаны на 4иг. 2.
При измерении параметрйв вибраций, для которых характерны малые пространственные перемещения тела 1, опорные точки базы 3 рассматриваются как неподвижные. При значительных перемещениях тела 1 в прос7райстве датчики 2, установленные на нем, перемещаются вместе с телом 1, ори этом лииии измерения датчиКсяз 2 изменяют свою
л. 4 - 1.4V./y J. Л. Л д.,Х|- -- - : .- -- - « vm1 f4(t); 1р ); lf f6(t),(1) ориентацию в пройгранстве, что влия/ ;ифференцируя уравнение по t, полу- ч ают:
1, fi(t); li ); 1з f3(t)-, i f4(t); 15 f5(t); i f«(t) .
40
Дифференцируя no Получают
t уравнения (2),
i, fi(t); li f4(t);,l3 f aCt), i+ 14 (t); is f5(t); it ffeCt). (3)
Таким образом, измерив ускорения, Скорости или перемещения вдоль шести |этрезков, соединяющих точки тела 1 с точками базы 3, с помощью уравнений (1)-(3) при известных начальных услр- Йиях можно полностью определить параметры движения тела
ет на обработку измерительной информации.
В начальный момент t, движения тела 1 точки m.l,...,т.6 занимают известное положение в неподвижной сис- (2) теме О, определенное координатами т. Кх,, у,, г„),...,т.6(х„.4, ym.tj Z 4)известны также начальные значения 1,,, 1,..., 1 1-координат, а точки тела 1 га. 1,... ,т. б определены в системе , .
Тело 1 движется в пространстве в течение некоторого интервала flt. При . этом,Считая в этом интервале точки 50 m.l,...,т.6 неподвижными, по показаниям датчиков 2 определяют значения ( + /Я,),..., (I j,+:iiL4), соответствующие времени ( /Jt ,).
Используя преобразования координат,
1 в пространст-55определяют положение точек m.l ,...,
йе. На dwr. 1: m. 1 ,...,га.б - точкит.б в системе осей значенитела; т. 1,..,,ш.6 - точки базы систе-ях 1-координат (1„+ Д1,),.., ,(1 1-координат (точки базы) Slj). Затем определяют новое поло мещения вдоль соединяющих эти точки
тела 1 с точками 1,...,6 базы 3 шести отрезков га. l т. 1; m.l га. 2; т.2 т.2; ш.2 т.6; т.б ш.б; т.б га. t, определяют движение тела 1. Возможные схемы расположения датчиков на теле 1 и точек на базе 3 показаны на 4иг. 2.
При измерении параметрйв вибраций для которых характерны малые пространственные перемещения тела 1, опорные точки базы 3 рассматриваются как неподвижные. При значительных перемещениях тела 1 в прос7райстве датчики 2, установленные на нем, перемещаются вместе с телом 1, ори этом лииии измерения датчиКсяз 2 изменяют свою
- -- - : .- -- - « vmжение в системе осей 0 точек, совершающих движение вместе с телом 1, которые в начальный момент t, совпадали с точками m.1,...,m.6. Для этого условно принимают тело 1 за базу с опорными точками т, 1,...,гп.6 , координаты которых найдены для момента ut, и используют начальные значения 1-координат 1 , ...,, определяющих текущее положение базы относительно тела 1. В результате определяются соответствующие значениям tg+ ut положения точек т. 1 (х,„,, у,
..е Ущ.б
Затем дается приращение at и указанные вычисления повторяются вновь и т.д. Обработка информации а зависимости от целей ее использования может производиться в реальном времени или по запомненный значениям сигналов датчиков 2.
Предлагаемый способ позволяет путем соответствующего выбора точек на теле 1 и на базе 3 уменьшить угол между измерительной осью каждого датчика и направлением вектора g (ускорение
свободного падения), что ведет к повышению точности измерений.
Формула изобретения
трех- ДО шести не лежащих на одной прямой точек, а измерения осуществляют вдоль соединяющих точки тела с точками базы шести отрезко в, которые могут пересекаться не бйлее трех в
одной точке и расположены не менее, чем в трех плоскостях и не более трех в одной плоскости,
Фив.
| Вибрации в технике | |||
| Справочник.- М.: Машиностроение, 1981, т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Джино-прядильная машина | 1922 |
|
SU173A1 |
