ел
ел
00 00
ч
Изобретение относится к автоматическому управлению движением наземных нерельсовых электрифицированных транспортных средств вдоль заданного токонесущего кабелем направления.
Цель изобретения - расширение функциональных возможностей системы за счет подачи непрерывного сигнала управления на исполнительный механизм поворота транспортного модуля.
На чертеже представлена блок-схема системы.
Система управления автоматическим транспортным модулем содержит автоматический транспортный модуль I, кабель 2, задающий маршрут движения, датчики 3 для измерения переменных состояний транспортного модуля. При этом выходы всех датчиков подключены к соответствующим входам задатчика 4 динамических свойств системы, а через соответствующие элементы 5 выделения модуля и усилители 6 - к входу сумматора 7, выход которого соединен с первым входом умножителя 8, второй вход которого соединен через инерционный фильтр 9 с выходом задатчика 4 динамических свойств системы Выход умножителя 8 соединен с- исполнительным механизмом 10 и входом корректора 11, выход которого соединен с соответствующим входом задатчика 4 динамических свойств системы.
Система работает следующим образом.
Сигналы с датчиков 3i, 32,...,35, измеряющих текущее значение переменных состояний автоматического транспортного модуля, поступают на соответствующие элементы 5|, 52,...,5о выделения модуля сигнала, а с их выхода через усилительные элементы 6i, 62,...,6s - на вход сумматора 7, с выхода которого через умножитель 8 - на вход исполнительного механизма 10, образуя тем самым основной контур регулирования - контур координатной обратной связи (КОС).
С выхода датчиков 3i, 32,...,3s сигналы также поступают на соответствующие входы задатчика 4 динамических свойств системы, который в зависимости от комбинации сигналов на входе вырабатывает на выходе сигнал, равный sgnS(t), где S(t) XCi + ЈA«T2.C2+...+ .C6+p(/);
t/ ат, U. 442,...,UnaTf - ВЫХОДНЫ6 НЭПрЯЖеНИЯ
датчиков;
1,2,...,5; Ci,Cz,--.,C;- соответствующие коэффициенты задатчика динамических свойств системы, которые определяют совокупностью требований, предъявляемых к качеству регу- лирования;
р(0-выходной сигнал корректора П. Возникновение сигнала S(t)Ј0 вызы0
5
0
5 0
5
5
вается ошибкой во вспомогательном контуре, т.е. в контуре задатчика динамических свойств системы. Значение сигнала S(t) в виде sgnS(t) поступает на вход инерционного фильтра 9, выход которого i(t) является непрерывным сглаженным сигналом. Сигнал ц() поступает на второй вход умножителя 8, изменяя коэффициент усиления контура координатной обратной связи в зависимости от расхождения .действительного и желаемого поведения замкнутой системы. При конечных коэффициентах передачи в контуре задатчика динамических свойств системы 5( и зависит от параметрических и координатных возмущений, действующих на автоматический транспортный модуль, которые изменяются в известных пределах, а также переменных состояниях модуля, поэтому качество работы вспомогательного контура неравномерно, что обычно сопровождается возникновением автоколебаний. Этот факт объясняется тем, что в отличие от изменяющихся параметров транспортного модуля настройки задатчика динамических свойств системы остаются постоянными. Устранить автоколебания и добиться S(t) 0 удается путем введения еще одного контура отрицательной обратной связи, соединяющего выход умножителя 8 через корректор 11 с входом задатчика 4 динамических свойств системы управления.
За счет введения данной связи во вспомогательном контуре системы управления- при определенных соотношениях параметров элементов контура возникает устойчивый скользящий режим, при котором S(/)-О, а значит система обладает заданными динамическими свойствами.
Технико-экономическая эффективность предлагаемой системы управления автоматическим транспортным модулем заключается в возможности ее использования в качестве системы управления движением автоматических транспортных средств не только с приводом поворота управляемых колес в виде электродвигателя постоянного тока или электрогидравлического исполнительного механизма, а и с автоматизированным приводом поворота управляемых колес, либо с электроприводом .поворота в виде мотор- колес.
Достигается повышение качества управления ATM при значительных изменениях его параметров, связанных с изменением массы транспортируемого груза, смещения центра масс ATM, изменения напряжения бортовых источников питания и т.д. Повышается надежность работы системы за счет подачи на привод поворота непрерывного сигнала управления.
Формула изобретения
1. Система управления автоматическим транспортным модулем, включающая кабель для задания маршрута движения, транспортный модуль с датчиками параметров движения, исполнительный механизм и регулятор, содержащий сумматор, входы которого соединены с выходами датчиков через соответствующие элементы выделения модуля сигнала и усилители, а также задат- чик динамических свойств системы управления, входы которого также соединены с выходами соответствующих датчиков, отличающаяся тем, что, с целью расширения функциональных возможностей, система снабжена инерционным фильтром, умножителем и корректорами, причем выход сумматора соединен с первым входом умножителя, второй выход которого соединен через инерционный фильтр с выходом задат- чика динамических свойств системы управления, а выход умножителя связан с исполнительным механизмом и входом корректора, выход которого соединен с соответствующим входом задатчика динамических сзойств системы управления.
2.Система по п. 1, отличающаяся тем, что инерционный фильтр содержит интегрирующую / С-цепь.
3.Система по п. 1, отличающаяся тем что корректор выполнен в виде инвертора.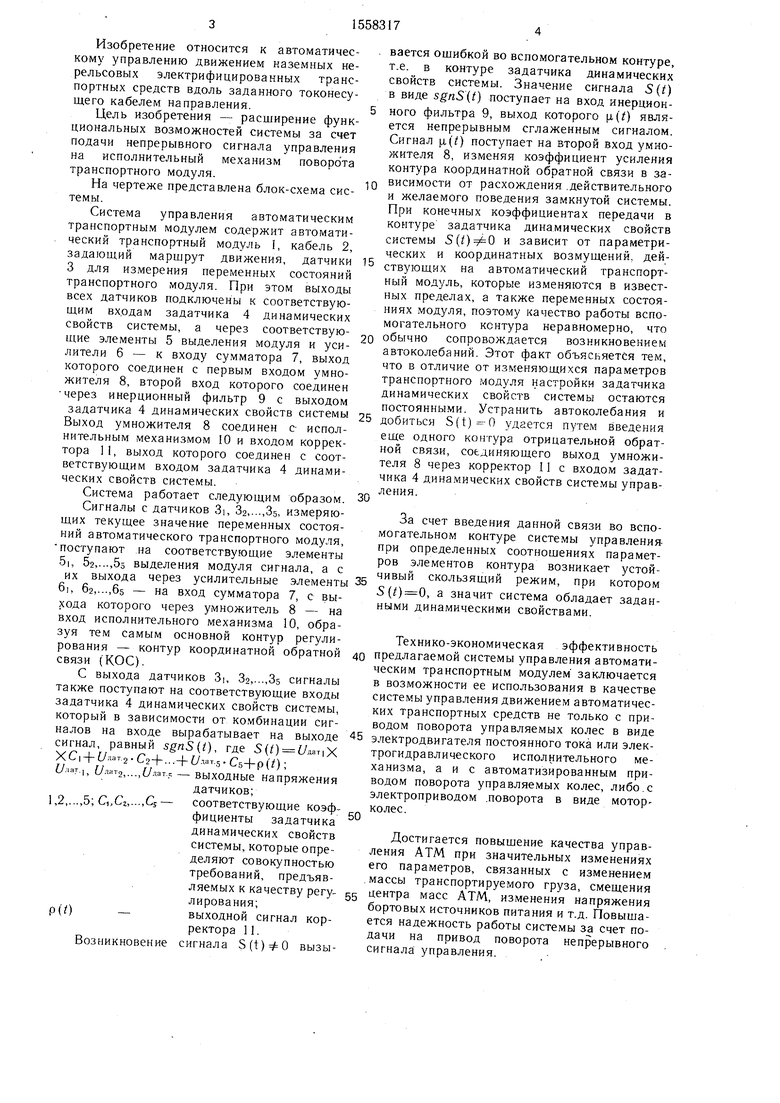
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Устройство автоматического управления пространственным положением быстровращающегося ротора | 1990 |
|
SU1739100A1 |
| Система автоматического регулирования давления пара в магистрали барабанного котла | 2019 |
|
RU2746377C1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
Изобретение относится к автоматическому управлению движением наземных нерельсовых электрифицированных транспортных средств вдоль заданного токонесущим кабелем направления. Цель изобретения - расширение функциональных возможностей регулятора за счет подачи непрерывного сигнала управления на исполнительный механизм поворота автоматического транспортного модуля. Задатчик 4 динамических свойств системы с датчиками 3 переменных состояний автоматического транспортного модуля 1, движущегося вдоль токонесущего кабеля 2, вырабатывает сигнал SGN S(T), который через инерционный фильтр 9 поступает на вход умножителя 8, изменяя коэффициент усиления контура координатной обратной связи в зависимости от расхождения действительного и желаемого поведения замкнутой системы, образованной датчиками 3, связанными через элементы 5 выделения модуля сигнала и усилители 6 с входами сумматора 7. Выходной сигнал сумматора, умножаясь в блоке на сигнал задатчика 4, воздействует на исполнительный механизм 10 управления рулевым механизмом. 2 з.п. ф-лы, 1 ил.
| Устройство автоматического управ-лЕНия дВижЕНиЕМ ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU847950A2 |
