«ЯВА
1ЧЭ
СП М
Фив.1
Изобретение относится к траиспорт- йьм средствам, в частности к, грузо- вьм автомобилям, и может быть использовано для повышения их устойчивости на поворотах.
Целью изобретения является повьпае- ние устойчивости движения транспортного средства
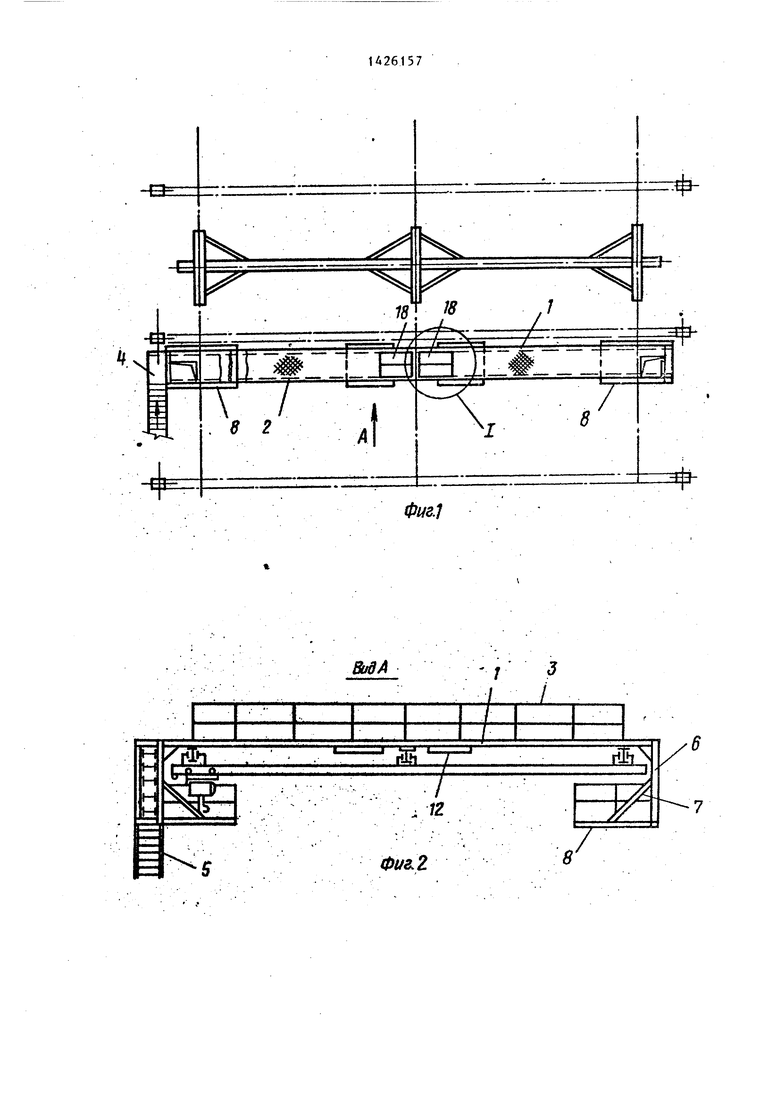
На фиг.1 изображено тралспортное средство, вид спереди; на фиг.2 принципиальная схема системы автоматического управления приводом петель 10, где перемножается с сигня- лом, постоянно постуттягопщм от датчит- ка .6 через квадратор В. Результирующий сигнал, пропорщюнальиьй функции
V
F f (), поступает на агрегат к
управления 11. Гидроцилиндр 5 перемещает кузов 4 транспортного средства, снабженный катками 3, по направляющим 2 в сторону поворота на величину, пропорциональную возникающей центробежной силе.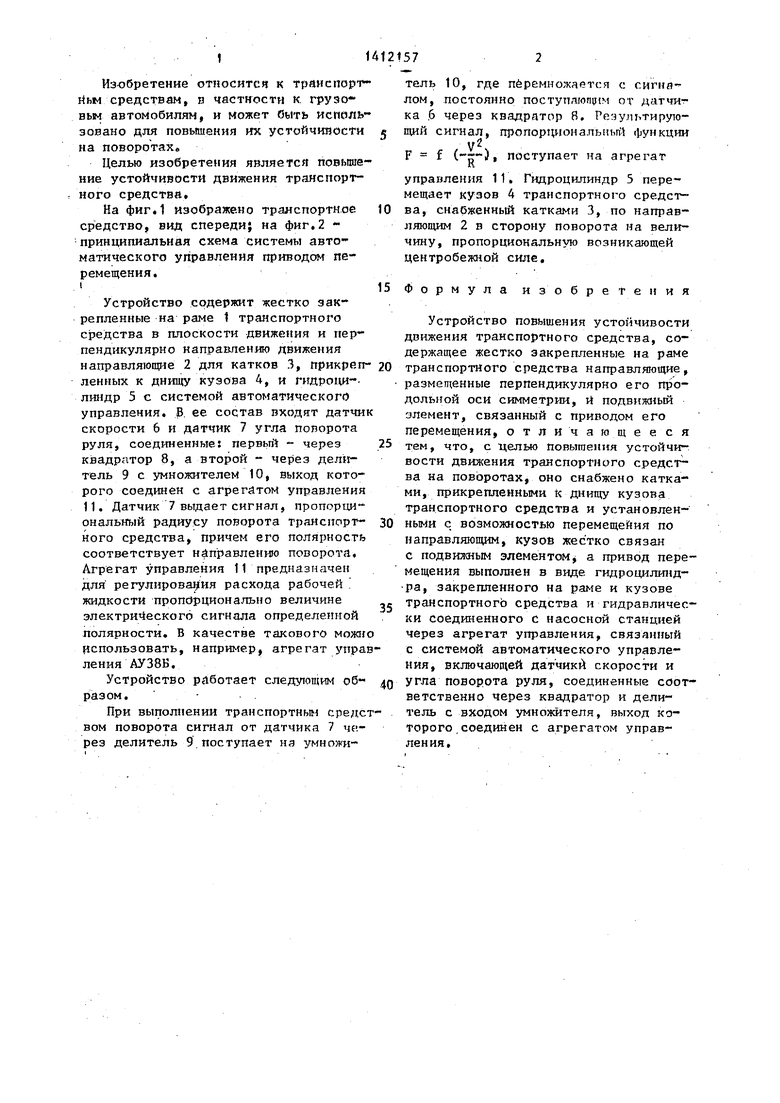
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТАБИЛИЗАЦИИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2519304C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕОБРАЗУЕМОГО В ЛЕТАТЕЛЬНЫЙ АППАРАТ, И ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169085C1 |
| КОМБИНИРОВАННАЯ ПОДВЕСКА АВТОМОБИЛЯ | 1998 |
|
RU2149106C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ И МОЙКИ АВТОМОБИЛЕЙ | 2006 |
|
RU2288118C1 |
| Устройство для стабилизации положения кузова транспортного средства | 1989 |
|
SU1664644A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |
| Транспортное средство со съемным кузовом | 1988 |
|
SU1606364A1 |
| Гидропневматическая независимая подвеска колесного модуля транспортного средства | 2017 |
|
RU2682943C1 |
| ГИДРОПОДЪЕМНЫЙ МЕХАНИЗМ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2514416C1 |
| САМОСВАЛЬНЫЙ КУЗОВ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2045421C1 |




Изобретение относится к транс - портным средствам, в частности к гру- аовым автомобилям, и может быть использовано для повышения их устойчивости на поворотах. Цель изобретения - повышение устойчивости движения транспортного средства. Устройство содержит направляющие 2, закрепленные на раме 1, по которым при помощи гидроцилиндра 5 может перемещаться кузов 4. Его перемещение осуществляется при работе системы а,вто- ,матнческого управления от датчиков скорости и угла поворота руля про- . , . порционально функции F (-„-) л- к 2 ил.
ремещения,
Устройство содержит жестко закрепленные на раме 1 транспортного средства в плоскости движения и перпендикулярно направлению движения направляющие 2 для катков 3, прикреп- ленных к днищу кузова 4, и Гидроци - линдр 5 с системой автоматического управления, р. ее состав входят датчи скорости 6 и датчик 7 угла попорота руля, соединенные; первьпЧ - через квадратор 8, а второй - через тель 9 с умножителем 10, выход которого соединен с агрегатом управления 11. Датчик 7 выдает сигнал, пропорциональный радиусу поворота транспорт- ного средства, причем его полярность соответствует направлению поворота. Агрегат управления 11 предназначен для регулирования расхода рабочей . жидкости пропорционально величине электриг1еског6 сигнала определенной полярности, В качестве такового можн использовать, например, агрегат упраления АУ38Б.
Устройство работает следующим об- разом.
При выполнении транспортным средсвом поворота сигнал от датчика 7 рез делитель 9.поступает ня умножи
15 Формула изобретения
5 0
0
5
Устройство повышения устойчивости движения транспортного средства, содержащее жестко закрепленные на раме транспортного средства направляющие, размещенные перпендикулярно его продольной оси симметрии, и подвижный элемент, связанный с приводом его перемещения, отличающееся тем, что, с целью повыгаения устойчивости движения транспортного средства на поворотах, оно снабжено катками, прикрепленными к днищу кузова транспортного средства и установленными с возможностью перемещейия по направляющим, кузов жес тко связан с подвилсным элементомj а привод перемещения выполнен в виде гидроцилиндра, закрепленного на раме и кузове транспортного средства и гидравлически соединенного с насосной станцией через агрегат управления, связанный с системой автоматического управления, включающей датчики скорости и угла поворота руля, соединенные соответственно через квадратор и делитель с входом умножителя, выход которого .соединен с агрегатом управления.
Вид А
; 3
I
riw
rlhN
-f
/2
Ч
Ж1
Фиг.2
/
;7
.Г)..П,
i
s
31
ж
S
Z
г ;; / //7
0//a:i J
18 №
П
г-гД
ж
S
Z
ZIj
7
(
8u в
/ /
Вид 8
E
i-/
gpi
H I nn
- -и
/2
ж
/575/5.
/
Ю
Фи&,5Ю
фиг. 6
-
Фиг 8
Фиг,7
гфК
ГО
| Устройство горизонтальной стабилизации транспортного средства | 1980 |
|
SU901137A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
