1C
СХ)
Изобретение относится к контрольно-измерительной технике, а именно к устройствам для контроля внешних размеров шаровых изделий и их сортировки, в частности для контроля внешних размеров шаровых твэ- лбв ВТГР.
Цель изобретения - повышение точности сортировки путем осуществления контроля д(1аметра изделия в разных плоскостях.
На фиг. 1 дана структурная схема устравления), формируемой в результате комбинации логических сигналов на входах блока логических преобразований 53 (с датчиков 4, 7, 10 и четвертого выхода регистра 48 соответственно) - «1,1,0, X, узел выдачи 13 подает изделие на участок наклонной плоскости 27, по которой изделие перекатывается к первой паре калибров 14, 17.
На выходе датчиков формируется сигнал «1, когда излучение источника инфракраср|)йства; на фиг. 2 - то же, блока обработки 10 ного излучения попадает в приемник, и фор- и|{формации; на фиг. 3 - то же, блока кон- мируется «О, если происходит перекрытие
потока излучения изделием или экраном, т. е. происходит срабатывание датчика.
троля; на фиг. 4 - то же, блока управления.
I Устройство для контроля и сортировки
ц|аровых изделий по внешним размерам соВходной сигнал комбинационной схемы.
держит три датчика верхнего положенияне влияющий на выходные сигналы, обознаизделия 1, 2, 3, три датчика нижнего положе- чается символом «X.
изделий 4, 5, 6, три датчика верхнего по-Изделие фиксируется фиксатором-толкал|зжения калибров 7, 8, 9, три датчика нижне-телем 24 над калибрами, причем центр изгф положения калибров 10, 11, 12, узел пода-делия располагается на оси калибров 14, 17.
ч 13, три калибра диаметром А 14, 15, 16,Срабатывает датчик 4, на входе 53 вознитри калибра диаметром di 17, 18, 19 с жест-20 комбинация «О, 1, О, X и на первом выKf) закрепленными с ними плоскими экрана-ходе 47 появляется команда (сигнал «1),
м|И, узел распределения 20, три привода ка-по которой привод 21 обеспечивает подъем
л|ибров 21, 22, 23, три фиксатора-толкателякалибров 14, 17. Калибры поднимаются,
2)4, 25, 26, четыре участка наклонных плос-достигая верхней точки подъема, размеров,
кЬстей 27-30, блок обработки информацииопределяемой датчиком 7. При этом, в зави311, блок контроля распределения 32,блок симости от внешних размеров изделия, оно
рйвления 33, три датчика распределения из-может занимать одно из следующих положеделий 34, 35, 36, три канала распределе-ний: изделие с размерами не задерн:ия 37, 38, 39, шаровые изделия 40, 41, 42,живается в обоих калибрах, не поднимается
регистры 43-49 и блоки логических преоб-и вызывает срабатывание датчика 4; изделие
разований 50-56... с размерами не задерживается
Блок обработки информации содержит калибром 14, но задерживается калибром 17
три регистра 43, 44, 45 и два блока логичес-и поднимается совместно с ним на высоту,
фх преобразований 50, 5, блок контроляне вызывая срабатывания ни датчика 4,
срдержит блок логических преобразованийни датчика 1; изделие с размером заS2 и регистр 46, блок управления содер-держивается калибром 14, поднимается совит четыре блока логических преобразова-,- местно с ним, вызывая срабатывание датн ий 53-56 и три регистра 47, 48, 49.
Устройство работает следующим образом.
: В начальный момент времени калибры Находятся в нижнем положении, заданном
чика 1.
Срабатывание датчика 7 формирует сигнал, разрешающий считывание блоком обработки информации показаний датчиков 1, 4 и на выходах регистра 43 в зависимости
датчиками 10, 11, 12. Далее по команде с 40 от входных сигналов формируется комбина- четвертого выхода регистра 47 (с блока уп-ция, представленная в табл. 1.
Таблица 1
равления), формируемой в результате комбинации логических сигналов на входах блока логических преобразований 53 (с датчиков 4, 7, 10 и четвертого выхода регистра 48 соответственно) - «1,1,0, X, узел выдачи 13 подает изделие на участок наклонной плоскости 27, по которой изделие перекатывается к первой паре калибров 14, 17.
На выходе датчиков формируется сигнал «1, когда излучение источника инфракрасВходной сигнал комбинационной схемы.
местно с ним, вызывая срабатывание датчика 1.
Срабатывание датчика 7 формирует сигнал, разрешающий считывание блоком обработки информации показаний датчиков 1, 4 и на выходах регистра 43 в зависимости
от входных сигналов формируется комбина- ция, представленная в табл. 1.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный прибор | 1988 |
|
SU1589072A1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Многоканальное устройство для определения координат множества одновременно действующих источников акустических сигналов | 1984 |
|
SU1201753A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| Устройство для автоматизированного контроля разобщенных электрических цепей | 1981 |
|
SU1035538A1 |
| Формирователь матричных команд | 2018 |
|
RU2707913C1 |
| Устройство для временного программного управления | 1985 |
|
SU1290259A1 |
| Распределенная система для программного управления технологическими процессами | 1990 |
|
SU1797096A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| СПОСОБ КОМПЛЕКСНОЙ ЗАЩИТЫ РАСПРЕДЕЛЕННОЙ ОБРАБОТКИ ИНФОРМАЦИИ В КОМПЬЮТЕРНЫХ СИСТЕМАХ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2259639C2 |


Изобретение относится к контрольно- измерительной технике и позволяет повысить точность контроля и сортировки путем многократного контроля внешних размеров шаровых твэлов и их сортировки. Суш,ность изобретения заключается в том, что в устройство сортировки, содержащее устройство выдачи, участок наклонной плоскости, каналы распределения, введены три пары кольцевых калибров с приводами, датчики верхнего и нижнего положений калибров, устройство распределения, участки наклонных плоскостей, фиксаторы-толкатели, датчики положения изделий, блок управления, блок обработки информации, блок контроля, датчики прохождения изделий через каналы распределения. 4 3. п. ф-лы, 4 ил. 3 табл.
Далее по.сигналу датчика 7 (на выходеКалибры устанавливаются по сигналу
53 комбинация «X, О, 1, X) на втором выходе55 датчика 10 (на входе 53 комбинация «О, 1, О,
47 появляется команда (сигнал «1), по ко-X). Затем (если на позиции контроля втоторой привод 21 осуществляет опусканиерой пары калибров отсутствует контроликалибров 14, 17.руемое изделие и калибры находятся в нижнем положении) по команде с четвертого выхода 48 (на входе 53 комбинация «О, 1, О, 1) на третьем выходе 47 формируется сигнал «1, который включает фиксатор- толкатель 24. Фиксатор-толкатель 24 удаляет изделие на участок наклонный плоскости 28, на входе 53 формируется комбинация логических сигналов «1, 1, О, X и узел подачи 13 подает очередное изделие на участок наклонной плоскости 27.
Проконтролированное изделие перекатывается по плоскости 28 к второй паре калибров 15, 18 и фиксируется фиксатором-толкателем 25. Расстояние L, проходимое изделием, вызывает поворот изделия вокруг
Затем по команде датчика 8 (на входе 54 комбинация «X, О, 1, X) на втором выходе 48 появляется команда (сигнал «1), по которой привод 22 осуществляет опускание калибров 15, 18. Калибры останавливаются по сигналу датчика 11 (на входе 54 комбинация «О, 1, О, X). Затем (если на позиции контроля третьей пары калибров отсутствует контролируемое изделие и калибры находятся в нижнем положении) по команде с четвертого выхода 49 (на входе 54 комбинация «О, 1, О, 1) на третьем выходе 48 формируется сигнал «1, который включает фиксатор-толкатель 25. Фиксатор-толкатель 25 удаляет изделие на участок наклонной плоскости 29. Изделие перекатывается к третьей паре калибров 16, 19, изменяя плоскость вращения в результате его изгиба на перпендикулярную, фиксируется фиксатором-толкателем 26. Срабатывает датчик 6, на входе 55 возникает комбинация «О, 1, О и на первом выходе 49 формируется команда (сигнал «1), по которой привод 23 обеспечивает
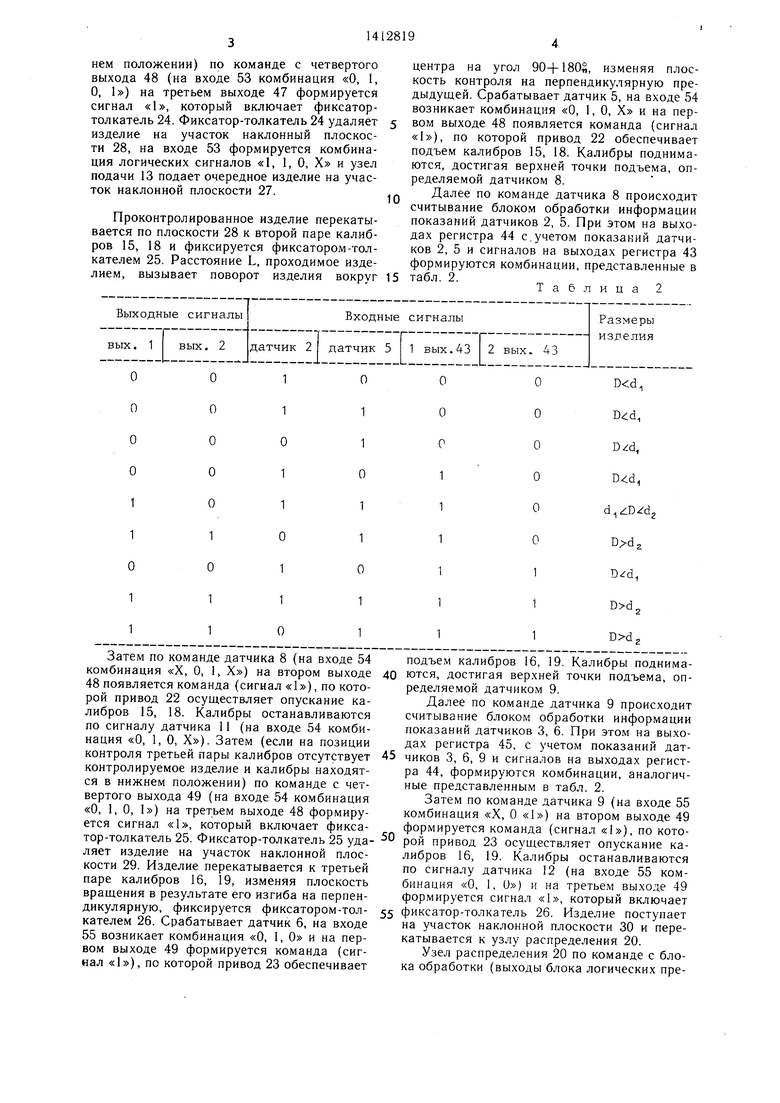
центра на угол 90+180S, изменяя плоскость контроля на перпендикулярную предыдущей. Срабатывает датчик 5, на входе 54 возникает комбинация «О, I, О, X и на первом выходе 48 появляется команда (сигнал «1), по которой привод 22 обеспечивает подъем калибров 15, 18. Калибры поднимаются, достигая верхней точки подъема, определяемой датчиком 8.
Далее по команде датчика 8 происходит считывание блоком обработки информации показаний датчиков 2, 5. При этом на выходах регистра 44 с.учетом показаний датчиков 2, 5 и сигналов на выходах регистра 43 формируются комбинации, представленные в
табл. 2.гт, о
Таблица 2
подъем калибров 16, 19. Калибры поднима40 ются, достигая верхней точки подъема, определяемой датчико.м 9.
Далее по команде датчика 9 происходит считывание блоком обработки информации показаний датчиков 3, 6. При этом на выходах регистра 45, с учетом показаний дат45 чиков 3, 6, 9 и сигналов на выходах регистра 44, формируются комбинации, аналогичные представленным в табл. 2.
Затем по команде датчика 9 (на входе 55 комбинация «X, О «1) на втором выходе 49 формируется команда (сигнал «1), по кото рой привод 23 осуществляет опускание калибров 16, 19. Калибры останавливаются по сигналу датчика 12 (на входе 55 комбинация «О, 1, О) и на третьем выходе 49 формируется сигнал «1, который включает
55 фиксатор-толкатель 26. Изделие поступает на участок наклонной плоскости 30 и перекатывается к узлу распределения 20.
Узел распределения 20 по команде с блока обработки (выходы блока логических преобразований 56) с учетом внешних размеров изделия (соответствующей комбинации сигналов на выходе 45) распределяется его в один из каналов 37, 38, 39.
: При этом, если на выходе 45 комбина- сигналов «О, О (), то оно направ- лЬется в канал 37, если на выходе 45 - «1, О (), то оно направляется в крнал 38, если на выходе 45 - «1, 1 (D d2) - в канал 39.
I Датчики 34, 35, 36 фиксируют прохождение изделия по соответствующему каналу.
Входы 52
1 вых,45 2 вых.45 дат.чик 34 датчик 35 датчик 36 00011
; Сигнал с выхода блока контроля поступает на вход блока управления (установоч- :ные входы регистров 47, 48, 49). В случае :неправильного р.аспределения изделия (сигнал «О) блок управления останавливает приводы устройства и осуществляется сигнализация об остановке, например, световым табло.
Формула изобретения
.а блок контроля 32 на основе этих сигналов фиксирует правильность распределения изделий. Сигналы с блока обработки информации 31 (выхода 45) и датчиков 34, 35, 36 поступают на входы блока логических преобразований 52 блока контроля. Если на входах была одна из комбинации, приведенных в таблице 3, то на выходе регистра 46 формируется сигнал «1, соответствующий правильному распределению. Если же комбинация входных сигналов отличается от приведенных в табл. 3, не выходе 46 формируется сигнал «О.
Таблица 3
ла подачи, вторые, третьи и четвертые - с входами приводов соответствующих калибров, пятый, шестой и седьмой - с входами соответствующих фиксаторов-толкателей и восьмые - с соответствующими входами
0 распределительного узла, датчики нижнего положения калибров соединены соответственно с четвертым, пятым и шестым входами блока управления, седьмой, восьмой и девятый входы которого подключены к соответствующим датчикам верхнего положения
5 калибров и к седьмому, восьмому и девятому входам блока обработки информации, выходы которого соединены с десятыми входами блока управления и первыми входами блока контроля правильности распределения, втоQ рые входы которого подключены к датчикам распределения изделий, а выход - с одиннадцатым входом блока управления, при этом последний участок наклонной плоскости расположен перпендикулярно к предыдущему, длину участков наклонных плоскостей
5 определяется по формуле
nDv(a + 180°n,) - 360
50
.55
п di + da где О - ;di и d2 - предельно допустимые внешние
размеры изделий;
а - угол между соседними участками наклонной плоскости; п - целое положительное число. 2. Устройство по п. 1, отличающееся тем, что блок управления содержит регистры и блоки логических преобразований, первый, второй и третий из них выходами соединены
с первыми входами первого, второго и третьего регистров, первый вход первого, второго и третьего блока логических преобразований являются соответственно первым, вторым и третьим входами блока управления, вторые входы первого, второго и третьего блока логических преобразований являются соответственно четвертым, пятым, шестым входами блока управления, а третьи входы первого, второго и третьего блоков логических преобразований являются седьмым, восьмым и девятым входами блока управления, входы четвертого блока логических преобразований являются десятыми входами блока управления, вторые входы всех регистров объединены и являются одиннадцатым входом блока управления, при этом первые выходы первого, второго и третьего регистров являются соответственно вторыми, третьими и четвертыми выходами блока управления, а вторые - соответственно пятыми, шестыми и седьмыми выходами блока управления, причем третий выход первого регистра является первым выходом блока управления, а выходы четвертого блока логических преобразований являются восьмыми выходами блока управления.
0
5
0
5
и третьего регистров, причем первый, второй и третий входы первого регистра являются соответственно первым, четвертым и седьмым входами блока обработки информации, второй и третий входы первого блока логических преобразований являются соответственно вторым и пятым входами блока обработки информации, вторые входы второго и третьего регистров являются соответственно восьмым и девятым входами блока обработки информации, а второй и третий входы второго блока логических преобразований являются соответственно третьим и шестым входами блока обработки информации, при этом выходы третьего регистра являются выходами блока обработки информации.
J«
Сдь/ходо8 aamv:
3
50
Фиг.2
С Ьыходод:
Фиг. Л
г
51
5
to
см 10
Сигнализация
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ШАРИКОВ | 0 |
|
SU290159A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
