(21)4183526/31-08(22)19.01.87
(46) 07.08.88. Бюл. № 29
(71)Фрунзенский политехнический институт
(72)В. Д. Даровских
(53)621.229.72(088.8)
(56) Авторское свидетельство СССР № 655506, кл. В 23 Q 7/04, 1976.
(54)МАНИПУЛЯТОР
(54) Изобретение относится к области ав- то.матизации производственных процессов в .машиностроении посредством .манипуляци- онных механизмов и может быть использовано для связи друг с другом основных технологических средств. Целью изобретения
является упрощение конструкции и повышение производительности за счет применения централизованной кинематической цепи транспортирования и захвата объекта манипулирования. Для транснортировапия объекта манипулирования управляемый тормоз 26 от- ютючен, включены управляемые муфты 6, 7 и при вращении привода 3 вал 2, поворачиваясь, поворачивает жестко связанные с ним управляемыми муфтами 6, 7, полые валы 4. 5. В свою очередь рычаги 16, 15, образующие .механическую руку, поворачиваются на нужный угол. Для захвата объекта манипулирования тормоз 26 включается, вал 2 фиксируется с основанием, .муфты 6, 7 выключаются и привод 12, вращаясь, приводит в действие захваты. 2 ил.
&
| название | год | авторы | номер документа |
|---|---|---|---|
| Пресс-автомат | 1987 |
|
SU1447512A1 |
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
| Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата | 1980 |
|
SU919865A2 |
| Кисть манипулятора | 1983 |
|
SU1199613A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Автоматический противоугонный рельсовый захват | 1975 |
|
SU553192A1 |
| Устройство для склеивания оптических деталей | 1989 |
|
SU1680655A1 |
| ГИДРОМЕХАНИЧЕСКИЙ ГРЕЙФЕР | 1999 |
|
RU2165386C2 |
| Клещи для вытаскивания болванок из изложниц | 1940 |
|
SU61522A1 |
| Рабочая клеть прокатного стана | 1989 |
|
SU1623807A1 |
Buff
О5
ю
00
Изобретение относится к аитомат) производственных процессов в машиностроении носредством манипуляциониых механизмов и может быть исиользовано для связи друг с другом оеиовных технологических средств.
Цель изобретения - унрощение конструкции и повышение производительности за счет применения цеитрализовапиой кинематической цени транспортирования и захвата объекта манипулирования.
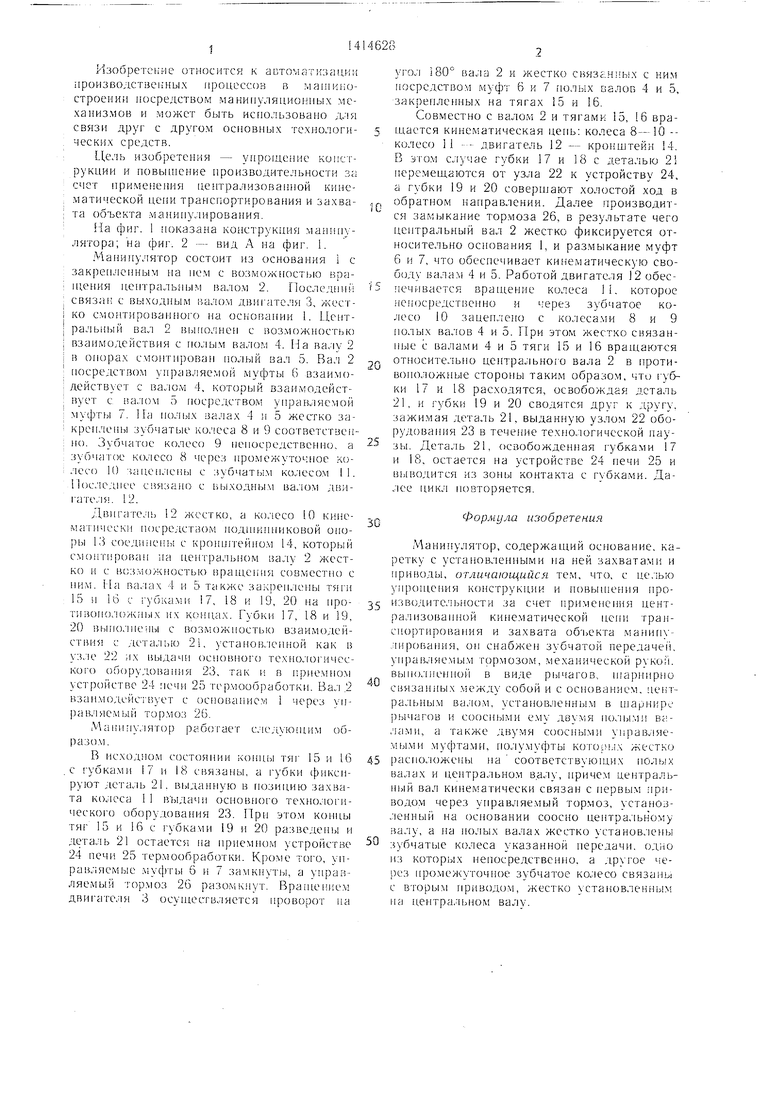
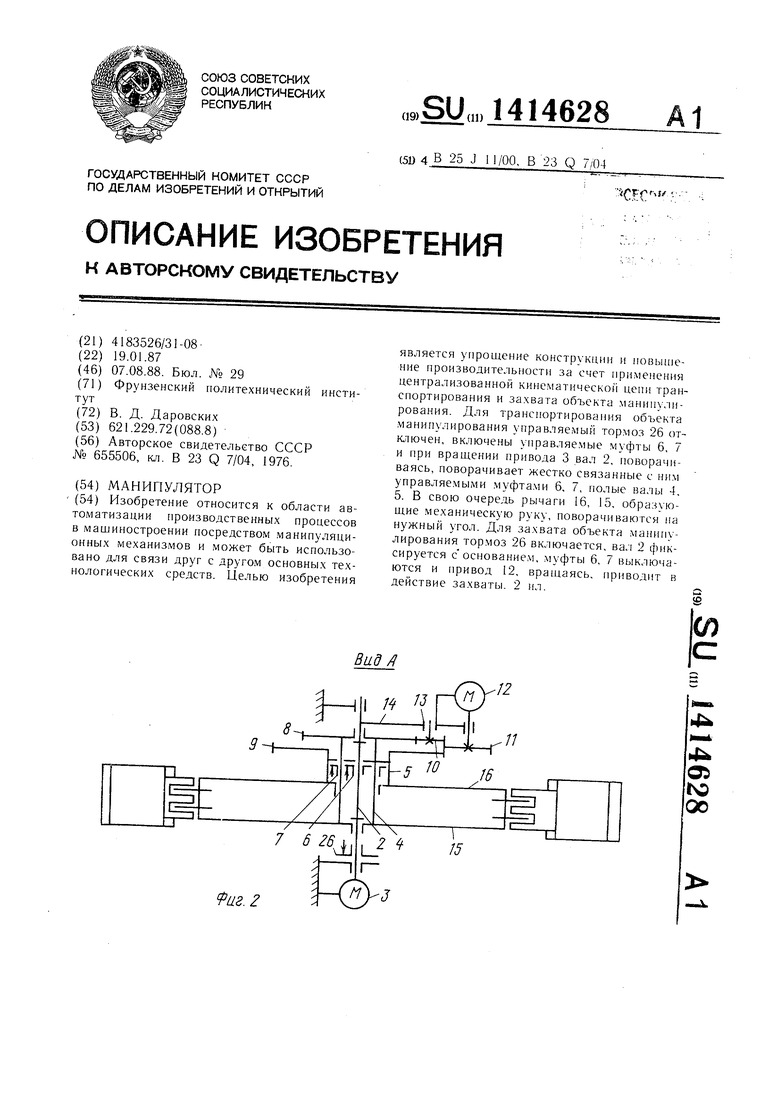
,Иа фиг. 1 показана конструкция манг-шу- лятора; на фиг. 2 - вид А на фиг. 1.
Манипулятор состоит из основания i с закрепленным иа исм с возможностью Бра- имения цеи 1 ральным валом 2. ПоследииГ; СВЯЗИ -; с выходным налом дви|-атсля 3, жестко смонтированного на осног5апии 1. Цпгг- ральный вал 2 вынолнеп с воз.можиостью взаимодействия с иольгм валом 4. На валу 2 в оио|зах смоитировап полый вал 5. Вал 2 посредстБо.м управляемой муфты 6 взаимодействует с валом 4, который взаимодействует с ва.лом 5 посредством управляемой муфты 7. На полых валах 4 i 5 жестко закреплены зубчатые шлееа 8 и 9 еоответствс ;- по. Зубчатое колесо 9 неиосредствеписх а зубчатое колесо 8 через промежуточное KCJ- лесо И) чапеи.лепы с зубчатым ко;1есом И. Иос-леднее связано с 15ыходньг 1 ва. юм дви- гате.пя. 12.
Двигатель 12 жестко, а колесо 10 кипе- ма пгчеекн иосредстзом подц|И И1иковой опоры 13 соединены с кронп1теЙ11о.м 14, который смоитпрован иа центральном валу 2 жестко и с воз.можпостью враи1е1П1я совместно с ним. Ма Ba. iax 4 и 5 также зак 5ецле1Ц)1 тяга 15 и 16 с губками 17, 18 и 19, 20 на противоположных их концах. Губки 17, 18 и 19, 20 вьн1о. 1пены с возможпостыо взаимодействия с дета.лыо 2, устапов.ленной как в уз.ле 22 их выдачи основного тсхно. югичес- Koi o оборудования 23, так н в 1;рпемпо.1 уст)ойстве 24 печи 25 термообработки. Ba.:i 2 взаи.чодействует с основанием 1 через управляемый тормоз 26.
Манину.лятор работает следующим образом.
В исходном состоянии KoiHibi тяг 15 и 16 ,с Л бка.ми 17 и 18 связаны, а |-убки ({)икси- руют деталь 21. выда1Ц|ую в позицию захвата колееа 1 1 выдачи осиовиого техноло1Ч1- ческого оборудования 23. При этом концы тяг 15 и 16 с губками 19 и 20 разведены и деталь 21 остается на нриемном устройстве 24 печи 25 термообработки. Кроме того, ун- равляемые .му(|)ты 6 и 7 замкнуты, а управляемый тормоз 26 разомкнут. Вран1еп)ем двигателя 3 осллцесгвляетея нроворот иа
0
0
угол 180° вала 2 и жестко связанных с ним посредством муфт 6 и 7 полых валов 4 и 5, закрепленных на тягах 15 и 16.
Совместно с валом 2 и тягами 15, 16 вращается кинематическая цепь: колееа 8-10 -колесо 11 двигатель 12 - кронштейн 4.
В это.м с;гучае губки 17 и 18 с дета.лью 21 неремещаются от узла 22 к устройству 24, а губки 19 и 20 соверп ают холостой ход в обратном направлении. Далее производится замыкание тормоза 26, в результате чего центральный вал 2 жестко фиксируется относительно основания 1, и размыкание муфт 6 и 7, что обеспечивает киь е.матическую свободу вала.м 4 и 5. Работой двигателя J2 обеспечивается вращение колееа П. которое иеиосредствепно и через зубчатое колесо 10 зацеплено с ко.леса.ми 8 и 9 полых ва. юв 4 и 5. При этом жестко снязан- liijie с валами 4 и 5 тяги 15 и 16 вращают-ся относительно центрального вала 2 в проти- воиоложные стороны таким образом, что 1 уб- ки 17 и 18 расходятся, освобождая деталь 21, и губки 19 и 20 сводятся друг к другу, зажи.мая деталь 21, выданную узлом 22 оборудования 23 в тече1ше технологической паузы. Дета.ль 21, освобожденная i-убками 17 и 18, остается па устройстве 24 нечи 25 и выводится из зоны контакта с губка.ми. Далее цикл новторяется.
Формула изобретения
Манипулятор, содержащий основание, каретку е установленными на ней захватам и приводы, отличающийся те.м, что, с це.лью упроше 1ия конструкции и повын1ения c; изводител зност1- за счет 1римене ия цеит- рализова1 и)й кинематичеекой не С 1ортирования и захвата об ьекта .мапиг - : ирова1 ия, он снабжен зубчатой передаче, .ч тормозом, меха -1ической рукой.
. В ВИДе р).,
связаи1 з х между собой и с основанием, ра.льны.м ва.ло.м, усл анов; епнь.м в шарнире )ычагов и соосн з1ми e.MV двумя ..ль.ми валами, а также двумя С(.) у 1рав;1яе- муфтами, .уфты кол орых жестко
3 зубчать е колеса указанной передачи, од}ш 1з которых не Юсредствен1 О, а другое через зубчатое KOJieco связаны с вторь. приводо.м, жссл ко установленн ; м .ентральном валу.
9иг. /
