f
а
ND
СС
(pi/iJ
ИзЬбрётение относится к, роботостроению И может быть использовано в различных йфраслях машиностроения и металлургии, и MactHocTH в атомном машиностроении и котАостроении, в роботизированных технологических комплексах, осуществляющих межоперационную транспортировку длинномерных изделий.
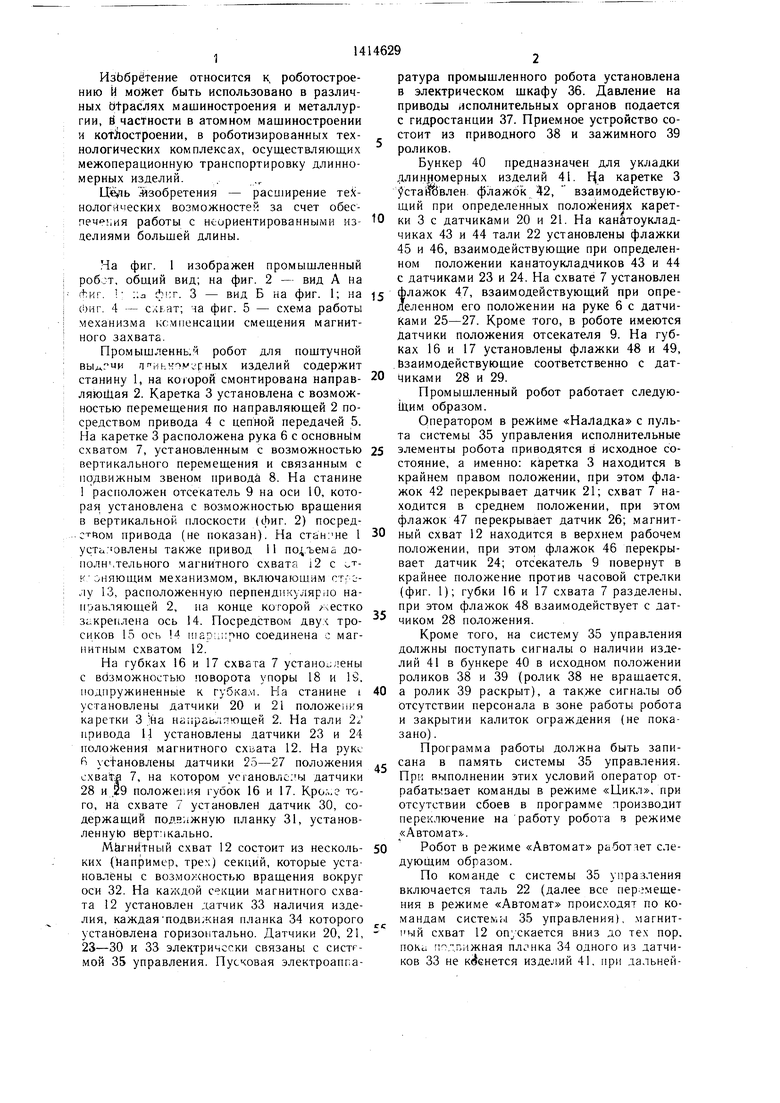
Цель ,$1зобретения - расширение технологических возможностей за счет обесБункер 40 предназначен для укладки длиндомерных изделий 41. каретке 3 установлен флажок 42, взаимодействующий при определенных положениях каретпеч кия работы с неориентированными из- О ки 3 с датчиками 20 и 21. На канатоукладчиках 43 и 44 тали 22 установлены флажки 45 и 46, взаимодействующие при определенном положении канатоукладчиков 43 и 44 с датчиками 23 и 24. На схвате 7 установлен флажок 47, взаимодействующий при определенном его положении на руке 6 с датчиками 25-27. Кроме того, в роботе имеются датчики положения отсекателя 9. На губках 16 и 17 установлены флажки 48 и 49, Взаимодействующие соответственно с датчиками 28 и 29.
Промышленный робот работает следую- (Дим образом.
Оператором в режиме «НаЛадка с пульта системы 35 управления исполнительные
делиями больщей длины.
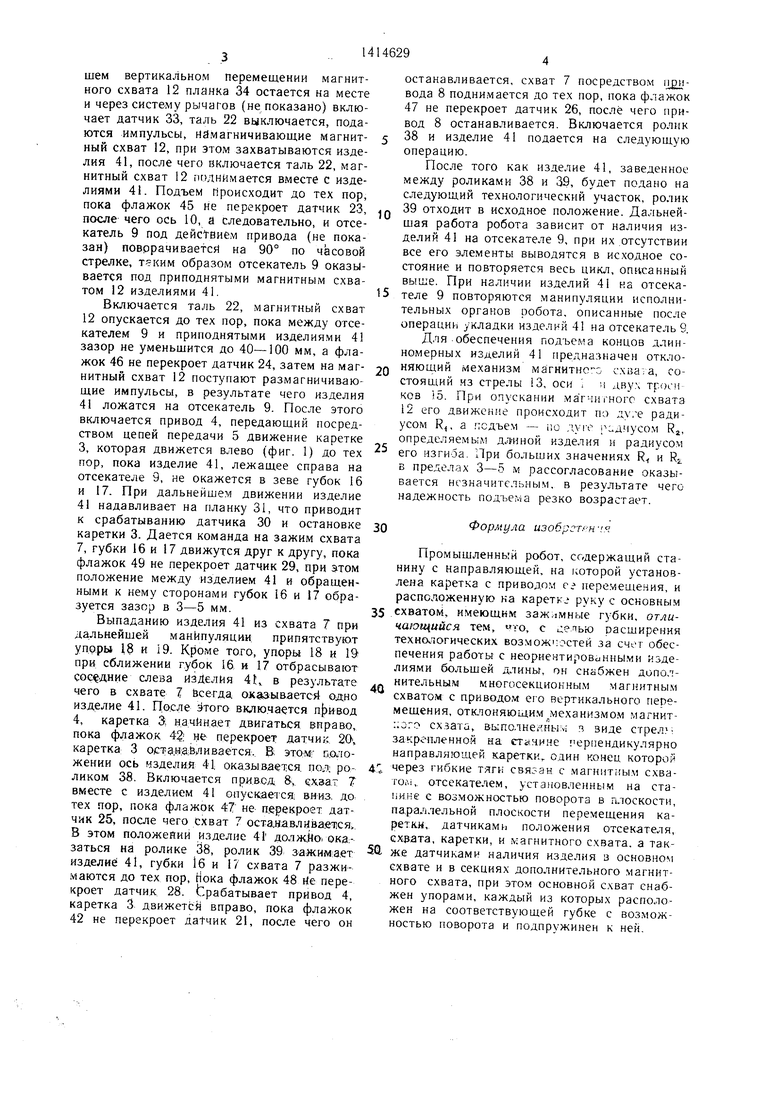
На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - вид А На (tHP. г ::а . 3 - вид Б на фиг. 1; на 15 С1)иг. 4 - сльат; ча фиг. 5 - схема работы механизма компенсации смещения магнитного захвата.
Промышленным робот для поштучной пгтиьн- м рных изделий содержит станину 1, на кошрой смонтирована направ- ляюиЦая 2. Каретка 3 установлена с возможностью перемещения по направляющей 2 посредством привода 4 с цепной передачей 5. На каретке 3 расположена рука 6 с основнь1м
20
схватом 7, установленным с возможностью 25 элементы робота приводятся в исходное состояние, а именно: каретка 3 находится в крайнем правом положении, при этом флажок 42 перекрывает датчик 21; схват 7 находится в среднем положении, при этом флажок 47 перекрывает датчик 26; магнитвертикального перемещения и связанным с подвижным звеном привода 8. На станине 1 расположен отсекатель 9 на оси 10, которая установлена с возможностью вращения в вертикальной плоскости (фиг. 2) посредством привода (не показан). На ст&н: не 1 устс.: овлены также привод И по.ъема дополнительного магнитного схвата 12 с ч.т- к оняющим механизмом, включающим cTfj- лу 13, расположенную перпендикуляр1 о направляющей 2, па конце которой /кестко закре11лена ось 14. Посредством двух тросиков 15 ось 4 liiapUJ pHO соединена с магнитным схватом 12.
На губках 16 и 17 схвата 7 устано лены с возможностью поворота упоры 18 и IS, подпружиненные к губкам. На станине i установлены датчики 20 и 21 положения каретки 3 ;На напраьлгтющей 2. На тали 12 привода И установлены датчики 23 и 24 положения магнитного схвата 12. На рук fi установлены датчики 25-27 положения охвата 7, на котором усгановлслы датчики 28 и ,29 положения губок 16 и 17. Кро..г того, на схвате 7 установлен датчик 30, содержащий подвижную планку 31, установ- ленну1о Вбртмкально.
М&гнйтный схват 12 состоит из нескольких (Например, трех) секций, которые установлены с возможностью вращения вокруг оси 32. На каждой секции магнитного схвата 12 установлен датчик 33 наличия изделия, каждая подвижная планка 34 которого установлена горизоь тально. Датчики 20, 21, 23-30 и 33 электрически связаны с СИСТР- мой 35 управления. Пусковая электроаппаратура промышленного робота установлена в электрическом шкафу 36. Давление на приводы исполнительных органов подается с гидростанции 37. Приемное устройство состоит из приводного 38 и зажимного 39 роликов.
Бункер 40 предназначен для укладки длиндомерных изделий 41. каретке 3 установлен флажок 42, взаимодействующий при определенных положениях каретки 3 с датчиками 20 и 21. На канатоукладэлементы робота приводятся в исходное состояние, а именно: каретка 3 находится в крайнем правом положении, при этом флажок 42 перекрывает датчик 21; схват 7 находится в среднем положении, при этом флажок 47 перекрывает датчик 26; магнитный схват 12 находится в верхнем рабочем положении, при этом флажок 46 перекрывает датчик 24; отсекатель 9 повернут в крайнее положение против часовой стрелки (фиг. 1); губки 16 и 17 схвата 7 разделены, при этом флажок 48 взаимодействует с датчиком 28 положения.
Кроме того, на систему 35 управления должны поступать сигналы о наличии изделий 41 в бункере 40 в исходном положении роликов 38 и 39 (ролик 38 не вращается,
а ролик 39 раскрыт), а также сигналы об Отсутствии персонала в зоне работы робота и закрытии калиток ограждения (не показано) .
Программа работы должна быть записана в память системы 35 управления. При выполнении этих условий оператор отрабатывает команды в режиме «Цикл, при отсутствии сбоев в программе производит переключение на работу робота в режиме «Автомат.
Робот в режиме «Автомат работает следующим образом.
По команде с системы 35 управления включается таль 22 (далее все пер меще- ния в режиме «Автомат происходят по командам системы 35 управления), магнитпый схват 12 опускается вниз до тех пор. пока по;:пижная 34 одного ив датчиков 33 не к(€нется изделий 41. при дальней
шем вертикальном перемещении магнитного схвата 12 планка 34 остается на месте и через систему рычагов (не показано) включает датчик 33, таль 22 выключается, подаются импульсы, намагничивающие магнитный схват 12, при этом захватываются изделия 41, после чего включается таль 22, магнитный схват 12 поднимается вместе с изделиями 41. Подъем Происходит до тех пор, пока флажок 45 не перекроет датчик 23, после чего ось 10, а следовательно, и отсе- катель 9 под дeйctвиeм привода (не показан) повррачивается на 90° по часовой стрелке, Т5ким образом отсекатель 9 оказывается под приподнятыми магнитным схва- том 12 изделиями 41.
Включается таль 22, магнитный схват 12 опускается до тех пор, пока между отсе- кателем 9 и приподнятыми изделиями 41 зазор не уменьшится до 40-100 мм, а флажок 46 не перекроет датчик 24, затем на магнитный схват 12 поступают размагничивающие импульсы, в результате чего изделия 41 ложатся на отсекатель 9. После этого включается привод 4, передающий посредством цепей передачи 5 движение каретке
3,которая движется влево (фиг. 1) до тех пор, пока изделие 41, лежащее справа на отсекателе 9, не окажется в зеве губок 16 и 17. При дальнейшем движении изделие
41надавливает на планку 31, что приводит
к срабатыванию датчика 30 и остановке каретки 3. Дается команда на зажим схвата 7, губки 16 и 17 движутся друг к другу, пока флажок 49 не перекроет датчик 29, при этом положение между изделием 41 и обращенными к нему сторонами губок 16 и 17 образуется зазор в 3-5 мм.
Выпаданию изделия 41 из схвата 7 при дальнейшей манипуляции припятствуют упоры 18 и 19. Кроме того, упоры 18 и 19 при сближении губок 16 и 17 отбрасывают соседние слева йзДелйя 4{ в результате чего в схвате 7 бсегда оказываете одно изделие 41. После того включается п{)ивод
4,каретка 3, на:Чйнает двигаться вправо, пока флажок 42: не перекроет датчик 20; каретка; 3 остада-Мивается.. Б; этом- Г1.оло- жении ось изделия 41, оказывается, под ра- ликом 38. Включается прявсд 8-,. (;хза,т 7 вместе с изделием 41 опускается; вниз, до тех пор, пока флажок 47 не- перекроет датчик 25, после чего Схват 7 осталавлйвает1ся
В этом положений изделие 41 долж.НО| окз;- заться на ролике 38, ролик 39 зажим;а.ет изделие 41, губки 1б и 17 схвата 7 разжимаются до тех пор. Пока флажок 48 Ые перекроет датчик 28. Срабатывает привод 4, каретка 3 движется вправо, пока флажок
42не перекроет дatчик 21, после чего он
останавливается, схват 7 посредством вода 8 поднимается до тех пор, пока флажок 47 не перекроет датчик 26, после чего привод 8 останавливается. Включается ролик
38и изделие 41 подается на следующую операцию.
После того как изделие 41, заведенное между роликами 38 и 39, будет подано на следующий технологический участок, ролик
39отходит в исходное положение. Дальней- щая работа робота зависит от наличия изделий 41 на отсекателе 9, при их .отсутствии все его элементы выводятся в исходное состояние и повторяется весь цикл, описанный выше. При наличии изделий 41 на отсекателе 9 повторяются манипуляции исполнительных органов робота, описанные после операции укладки изделий 41 на отсекатель 9. Для-обеспечения подъема концов длинномерных изделий 41 предназначен отклоняющий механизм магнитно о схвага, состоящий из стрелы 3, оси i п дву.ч троен .КОБ 15. При опускании ма гчигного схвата 12 его движение происходит по дуге радиусом R, а псдъем - но Р:.д.иусом Rj, определяемым длиной изделия и радиусо.м его изгиба. При больших значениях R и R;, в пределах 3-5 м рассогласование оказывается незначительным, в результате чего надежность подъема резко возрастает.
Формула изобрст.н ,.
О
0
Промышленный робот, содержащий станину с направляющей, на 1соторой установлена каретка с приводом е пере.мещения, и расположенную на каретк, руку с основным
5 схватом, имеющим губки, отли- чающийся тем, то, с 1депью расширения технс тогических возможностей за счет обеспечения работы с неориентированными изделиями большей длины, он снабжен дополнительным многосекционны.м .магнитным схватом с приводом его вертикального перемещения, отклоняющим механизмом магнит- :;ого сх.атй, выполненным з виде стрел ; закрепленной на станине перпендикулярно направляющей каретки,. о.аин конец которой через гибкие тяги связан с магнитны.м схва- го,м,. отсекателем, установленным на станине с возможностью поворота в плоскости, па.раллельной плоскости перемещения ка- реткн, датчиками положения отсекателя, схвата, каретки, и магнитного схвата. а так0. же датчиками наличия изделия з основном схвате и в секциях дополнительного магнитного схвата, при этом основной схват снабжен упорами, каждый из которых расположен на соответствующей губке с возможностью поворота и подпружинен к ней.
MA
t 21
.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU823118A1 |
| Трубогибочный комплекс | 1987 |
|
SU1470389A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Устройство для автоматической смены инструментальных блоков роторно-конвейерных линий | 1983 |
|
SU1161322A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| Схват манипулятора | 1980 |
|
SU965765A1 |

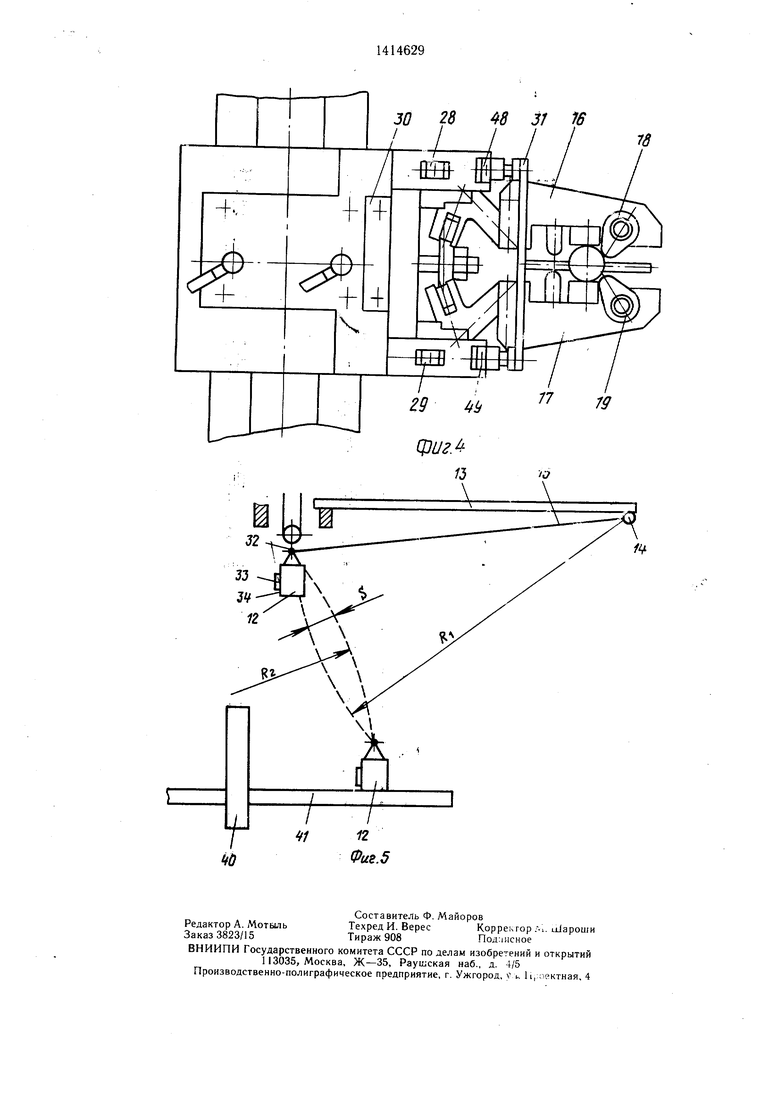
Изобрр/ение относится к роботостроению и быть использовано в различ- HbiA отраслях машиностроения и металлургии, в частности зтомном машиностроении и котлостроенин, в роботизированных технологических комп;1ексах, осуществляющих м-ежоперационную транспортировку длинномерных изделий: Целью изобретения является расширение ......ологических возможностей эг --с; обеспечения работы с неори(жтированными изделиям большем длины. Захват изделий из бункера 40 прсисходит с помо щью дополнительного многосекционного магнитного схвата, который опускает- :я в бункер : помош.ьк тали 22. При этом псмош.ью отклоняющегс механизма ма; нитный схват опускается по радиусу R, н поднимается по радиусу Rj, определяемым длиной изделия и радиусом егс изгиба, в результате чего нгдежнссть по .ьема ррз .: . возрастает. После пoдъe. а под него подводится отсекатель S, на котопь оно затеч опускас-гся. Далее ;.оделие захватывается осг:о9ным схвато. 7, на губках которого установлены пово лтные и подпру- : м:-;еньые к губкам упоры для захвата только объекта, и переносится на транспортирующий механнз.у:, выполненный в виде роликов 30, 39. Для с С-г-ом:.тиЧх- 1 кого управ.- ления робог снабжен даг-. iiG. ния отс.екгтгля 9, схвата 7, каретки 3 и мяг- нитноги схвата, а также датчиками наличия здели в схвате 7 и секциях магнитного с.хчат . 5 ил. с S
видь
7Г
Фи.2
9и,г.з
30 28 48 31 16
I J
7S
| Манипулятор, модель ТС-300 KR | |||
| Проспект фирмы JSV/, Japan Steel Works, DJ 82.6.15, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
