(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват | 1987 |
|
SU1440707A2 |
I
Иэобретедсие откосятся к манипуляторам, которые могут быть использованы в автоматических сборочных линиях с программным управлением, предназначенных дл сборки изделий электронной техники.
Известны манипуляторы, содержащие расположенные в полом корпусе схваты, механизмы вертикального перемешения и поворота механизмов схватов tj ,
Недостатком известных манипуляторов является то, что они предназначены только для схвата и переноса детали из одной точки в другую.
Цель изобретения - повышение производительности труда за счет совмещения операций транспортировки и ориентации детали.
Поставленная цель достигается тем, что манипулятор снабжен зубчатой передачей, одно из колес которой кинематически связано с механиалом поворота схвата, а другое - с пoльnvI корпусом схвата, а также установленным в этом
корпусе и жестко связанным о щжводом губок штоком с фиксатором.
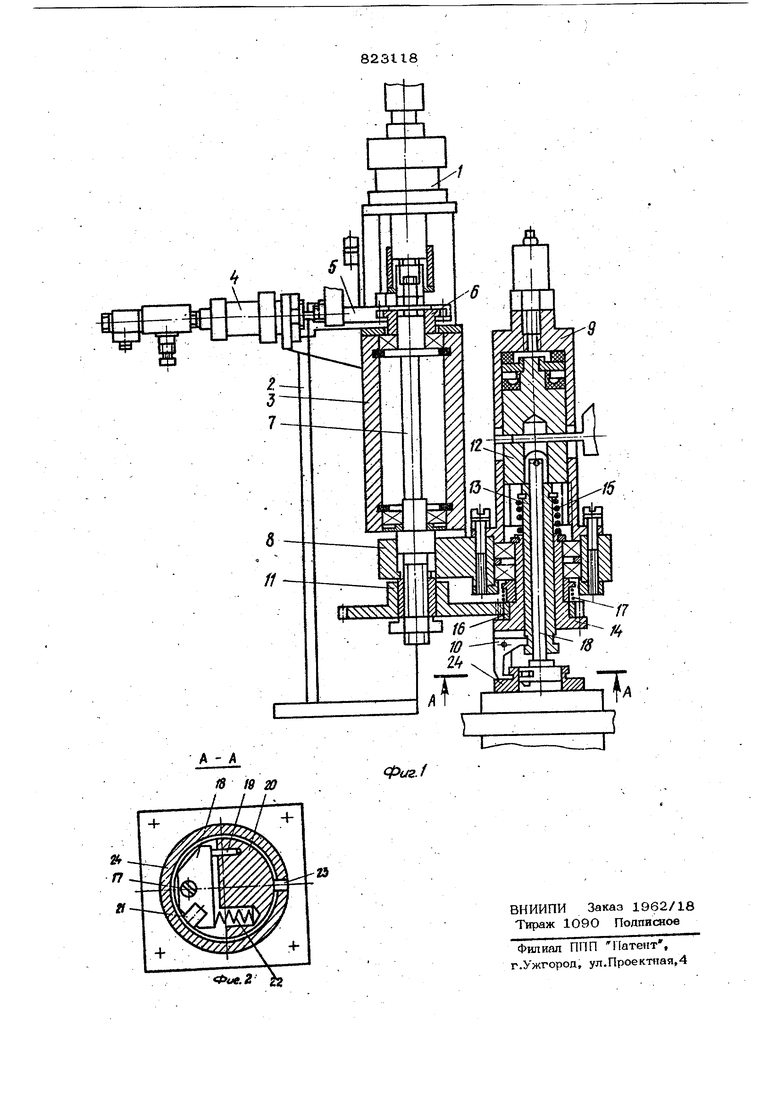
На фиг. t представлена конструкция манипулятора; на фиг. 2 - разрез А-А на фиг. I.
Манипулятор содержит схват, механизм вертикального перемешения выполнен в виде силового цилиндра t, который жестко закреплен на направляющ кронштейне 2, по которому двйжется каретка 3 с жестко закрепл 1ным на ней мелйняамои поворота, выполненным в виде силового цилиндра 4, последний посредством рейки 5 связан с зубчатым колесом 6, которое жестко связано с валом 7. На другом конце вала 7 жестко закреплено водило 8, с расположенным на нем приводом 9 губок 10. Зубчатое колесо II кинематически связано с механизмом поворота схвата (с силовым цилиндром 4). Привод 9 губок Ю состоит из силового цилиндра, внутри которого расположен поршень 12; опирающийся на подпружн382
ненную втулку 13, в пазы которой встав лекы три губки Ю схвата. Последние шарнирно закреплены на корпусе 14. Прунаша 15 служит для возврата поршня 12.
Зубчатое колесо 16, обрааукицее зубчатую передачу с колесом 11, с помощью пружины 17 прижато к корпусу 14, образуя с ним фрикционную пару.
Ориентирукиций шток 18 жйЬтко связан с силовым цилиндром привода 9 губок. На конце штока 18 штифтом 19 шарнирно з&креплен сектор 2О с фиксатором 21. Сектор 20 поджат к ориентируемой детали пружиной 22. Штифт 23 служит для ограничения поворота сектора 20 при отсутствии детали 24.
Манипулятор работает следующим образом.
В исходном положении губки Ю разжаты, воздух подается в верхнюю полость цилиндра привода губок, схват расположен вверху, воздух подается в нижнюю полость сило1вого цилиндра I. При подаче воздуха в верхнюю полость цилиндра 1 его шток движется вниз и перемешает до упора связанную с ним каретку 3. Затем отключается воздух, поступающий в цилиндр привода губок, и поршень 12 начинает движение вверх от сжатой пружины 15. Втулка 13 также движется вверх, губки 10 начинают сходиться к центру и зажимают деталь 24. Далее воздух подается в нижнюю полость цилиндре t, квретка 3 поднимается вверх, и захваченная деталь вытаскивается из лотка с деталями. При подаче воздуха Б левую полость цилиндра 4 механизма, поворота схвата рейка 5 начинает движение и поворачивает находящееся с ней в зацеплении зубчатое колесо 6, жестко связанное с валом 7, на конце которого закрепленоводило В.
184
Кинематика механизма выбрана таким обреизом, что при повороте водило 8, т.е. при перенйсе захваченной де- тали от зонь лотка в зону спутника, зубчатое колесо 16, откатываясь по жестко закрепленному колесу 9, делает более одного оборота вокруг своей оси. Корпус 14 за счет фрикщ1Ьнной пары с зубчатым колесом 16 также делает более одного оборота ч Захваченная деталь вращается до тех пор, пока она своим выступом не зафиксируется на фиксаторе 21, при дальнейшем повороте происходит проскальзывание зубчатого колеса 16 относительно корпуса 14.
Таким образом, деталь при своем пе- ремацении от загрузочного лотка до спутника ориентируется по выступу или по впадине и при фиксации над спутником находится в строго ориентированном положении..
Формула изобретения
Манипулятор, содержащий расположенный в полом корпусе схват, имеющий губки с приводом , а также механизмы вертикш1ьного пе эеме1дения и поворота схвата, о тли чающий с я тем, что, с целью повышения производительности, он снабжен зубчатой пе редачей, одно из колес которой кинматически связано с механизмом поворота схвата, а другое - с полым корпусом схвата, а также установленным в этом корпусе и жестко связанным с гфиводом губок штоком с фиксатором.
Источники информации,
принятые во внимание при экспертизе
I. Белянин П. Н. Промышленные роботы. М., Машиностроение, 1975. с. 110-112.
