фиг.
Изобретение относится к робото- технике и может быть использовано ;для осуществления линейных перемеще- ;ний в цикловых автоматических мани- |Пуляторах.
I Цель изобретения - улучшение ди :намических характеристик и повыше- |ние надежности за счет регулировки зазора между подвижной направляющей :И опорами качения.
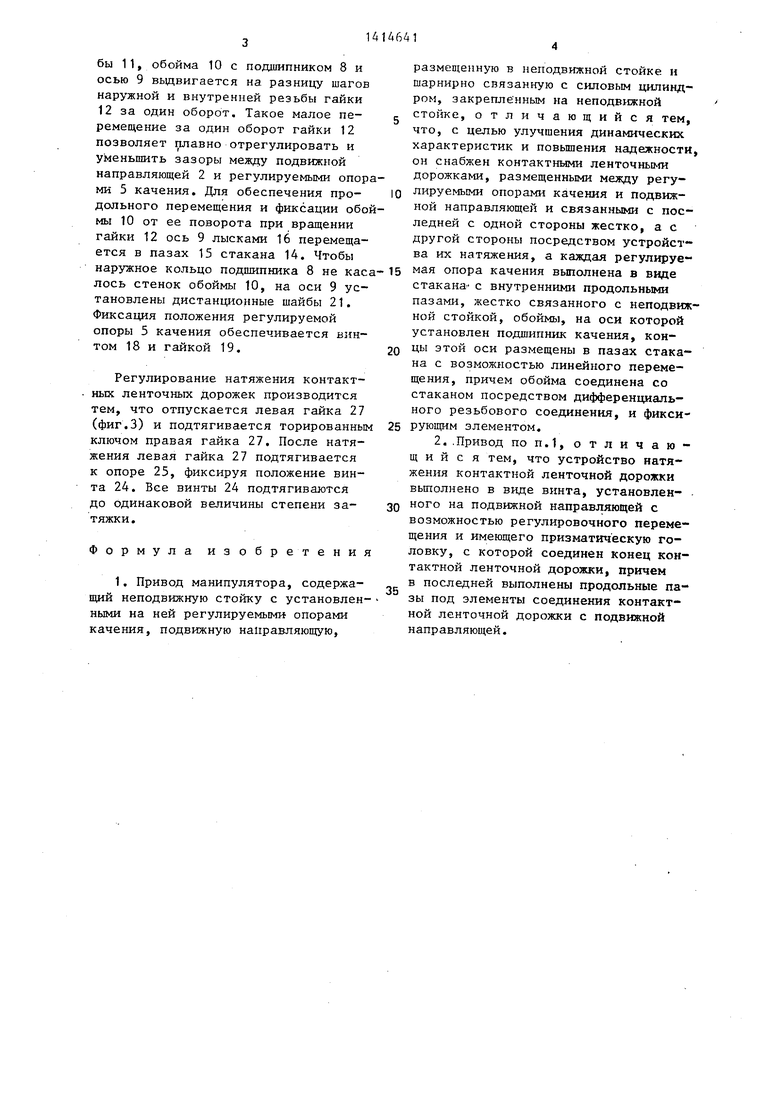
: На фиг. 1 изображен привод мани- |пулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - ; узел I на фиг. 1; на фиг. А - вид Б I на фиг. 3.
I Привод манипулятора содержит сило jвой цилиндр 1 (двигатель), располо- |Женный внутри подвижной направляющей I2 и закрепленный шарнирно между подвижной направляющей 2 и неподвижной стойкой 3 посредством регулируемого кронштейна 4, регулируемые опоры 5 качения, закрепленные на не- подвижной стойке 3 посредством диф- iференциального резьбового соединения I контактные ленточные дорояжи 6 и уст Iройства 7 натяжения контактных лен- jточных дорожек 6, которые укреплены i на подвижной направляющей 2. i Регулируемые упоры 5 качения :(фиг.2) содержат подшипники 8 ка- |чения, которые укреплены на осях 9 ;в обоймах 10. Последние имеют резь- бу 11 и соединены с гайками 12, кото рые имеют внутреннюю 11 и наружную :13 резьбы. Внутренняя резьба 11 j имеет минимально меньший шаг, из стандартного ряда, чем наружная резьба 13. Гайки 12 посредством наружной резьбы 13 соединены со стаканами 14, которые закреплены на неподвижной стойке 3, тем самым замыкая дифференциально-резьбовое соединение между установленным на неподвижной стойке стаканом 14, гайкой 12 и регулируемой опорой 5 качения посредством внутренней резьбы 11 и наружной резьбы 13. Стаканы 14 име- ют на внутренней поверхности продольные пазы 15, в которые входят оси 9 лысками 16 для фиксации положения регулируемых опор 5 качения от разворота. Для местного стопорения стакан 14 имеет прорезь 17 и стопорный винт 18.
Для полной динамической фиксации положения регулируемой опоры 5 качения на гайке 12 имеется контргайка
19. В стаканах 14 вьшолнены цилиндрические направляющие 20, в которьк могут перемещаться обоймы 10. Направ- 5 ляющие 20 необходимы для восприятия боковых нагрузок со стороны подвижной направляющей 2 через контактные ленточные дорожки 6, подшипники 8 качения, оси 9, обоймы 10. Между
0 обоймой 10 и подшипником 8 на оси 9 имеются дистанционные шайбы 21.,
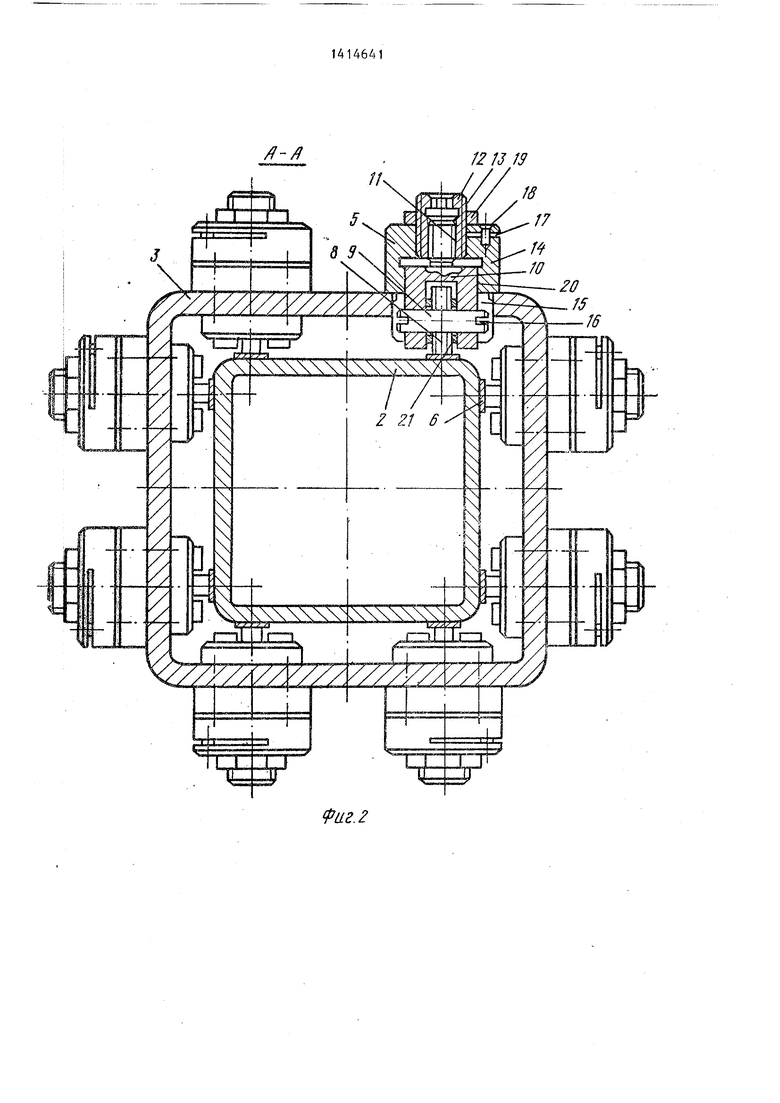
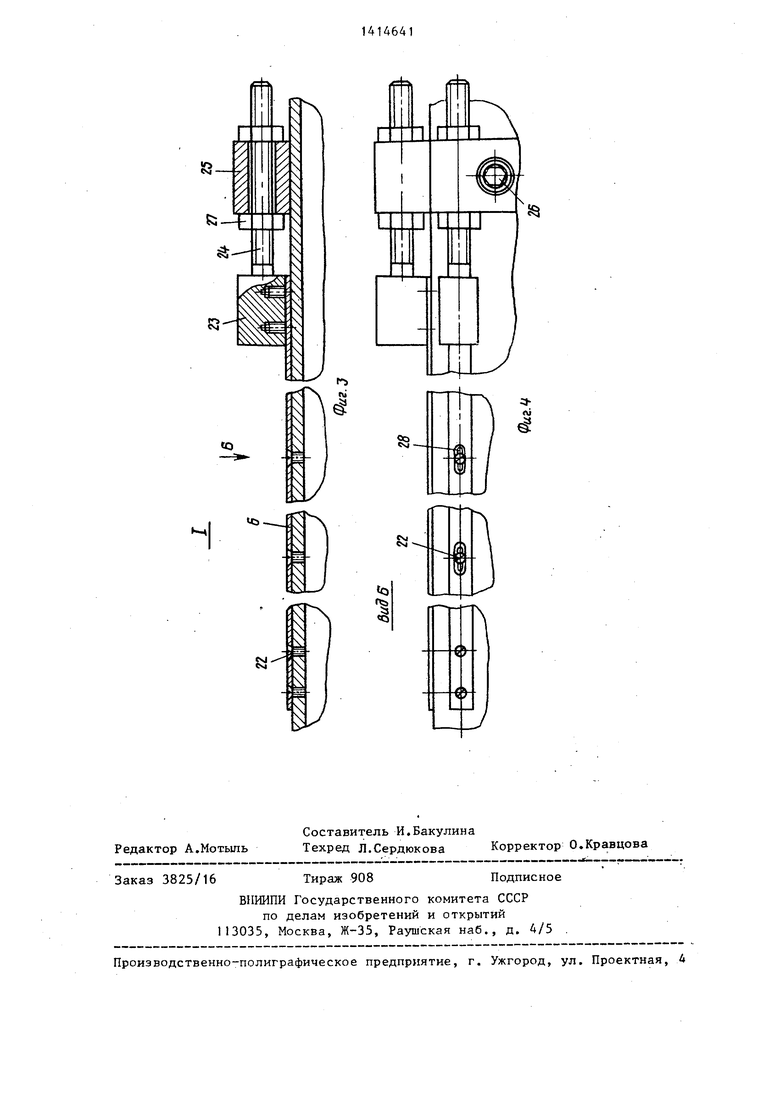
Контактные ленточные дорожки 6 (фиг.З) крепятся одним концом двумя элементами соединения, например вин5 тами 22, к подвижной направляющей 2 и другим концом - к призматическим головкам 23 винтов 24 устройства 7 натяжения.
Устройство 7 натяжения (фиг.З
0 и 4) контактных ленточных дорожек 6 содержит опору 25, закрепленную винтами 26 на подвижной направляющей 2, винты 24 и гайки 27. Контактные ленточные дорожки 6 имеют овашьные
5 пазы 28 для компенсации технологических погрешностей при закреплении винтами 22 по всей длине через шаг после равномерного натяжения винтами 24, гайками 27 и тензометрической
0 проверки.
Привод работает следующим образом.
Силовой цилиндр 1 (двигатель) толкает подвижную направляющую 2 относительно неподвижной стойки 3, упираясь в регулируемьй кронштейн 4. Подвижная направляющая 2 с контакт- нътма ленточными дорожками 6 и устройствами 7 натяжения перемещается по охватываемым их (фиг.2) регулируемым опорам 5, укрепленным на неподвижной стойке 3. При этом регулируемые опоры 5 качения обкатываются по правомерно натянутым контактным ленточным дорожкам 6, выполненным из твердой пружинной стали. Регулирование положения подвижной направляющей 2 (фиг.2) относительно неподвижной стойки 3 и зазором между подвижной направляющей 2 с контакт- ными ленточными дорожками 6 и регулируемыми опорами 5 производится за счет вращения гайки 12.
5
0
5
При вращении по часовой стрелке на один оборот гайка 12 завертьшает- ся в стакан 14 на величину, равную шагу наружной резьбы 13. Обойма 10 при этом перемещается вдоль стакана 14 на величин -- шага внутренней резьбы 11, обойма 10 с подшипником 8 и осью 9 выдвигается на разницу шагов наружной и внутренней резьбы гайки 12 за один оборот. Такое малое перемещение за один оборот гайки 12 позволяет плавно отрегулировать и уменьшить зазоры между подвижной направляющей 2 и регулируемыми опорами 5 качения. Для обеспечения продольного перемещения и фиксации обоймы 10 от ее поворота при вращении гайки 12 ось 9 лысками 16 перемещается в пазах 15 стакана 14. Чтобы наружное кольцо подшипника 8 не касалось стенок обоймы 10, на оси 9 установлены дистанционные шайбы 21. Фиксация положения регулируемой опоры 5 качения обеспечивается винтом 18 и гайкой 19.
Регулирование натяжения контактных ленточных дорожек производится тем, что отпускается левая гайка 27 (фиг.З) и подтягивается торированным ключом правая гайка 27. После натяжения левая гайка 27 подтягивается к опоре 25, фиксируя положение винта 24. Все винты 24 подтягиваются до одинаковой величины степени затяжки.
Формула изобретения
1. Привод манипулятора, содержащий неподвижную стойку с установленными на ней регулируемыми опорами качения, подвижную направляющую,
размещенную в неподвижной стойке и шарнирно связанную с силовым цилиндром, закрепле нным на неподвижной
стойке, отличающийся тем, что, с целью улучшения динамических характеристик и повьшения надежности, он снабжен контактными ленточными дорожками, размещенными между регу-
лируемыми опорами качения и подвижной направляющей и связанными с последней с одной стороны жестко, а с другой стороны посредством устройства их натяжения, а каждая регулируемая опора качения выполнена в виде стакана с внутренними продольными пазами, жестко связанного с неподвижной стойкой, обоймы, на оси которой установлен подшипник качения, концы этой оси размещены в пазах стакана с возможностью линейного перемещения, причем обойма соединена со стаканом посредством дифференциального резьбового соединения, и фиксирующим элементом.
2..Привод ПОП.1, отличающийся тем, что устройство натяжения контактной ленточной дорожки выполнено в виде винта, установлен- .
ного на подвижной направляющей с
возможностью регулировочного перемещения и имеющего призматическую головку, с которой соединен конец контактной ленточной дорожки, причем в последней выполнены продольные пазы под элементы соединения контактной ленточной дорожки с подвижной направляющей.
/I-/}
1213 19
Изобретение относится к области робототехники и может быть использовано для осуществления линейных перемещений в цикловых автоматических манипуляторах. Целью изобретения является улучшение динамических характеристик и повьш1ение надежности. Это обеспечивается за счет применения дифференциального резьбового соединения в регулируемых опорах,5, что позволяет обеспечить точную регулировку зазора между подвижной направляющей 2 и регулируемыми опорами. Устройство натяжения 7 контакт ных ленточных дорожек 6, размещенных между подвижной направляющей 2 и ре- гулируемыми опорами 5, способствует ; плотному их прилеганию по .всей длине к подвижной направляющей 2. 1 з.п. ф-лы, 4 ил.
аг.2
N
«О
to.
и
| Юревич Е,И | |||
| и др | |||
| Устройство промьшшенных роботов | |||
| - Л.: Машиностроение, 1980, с | |||
| Способ исправления пайкой сломанных алюминиевых предметов | 1921 |
|
SU223A1 |
