00
со
S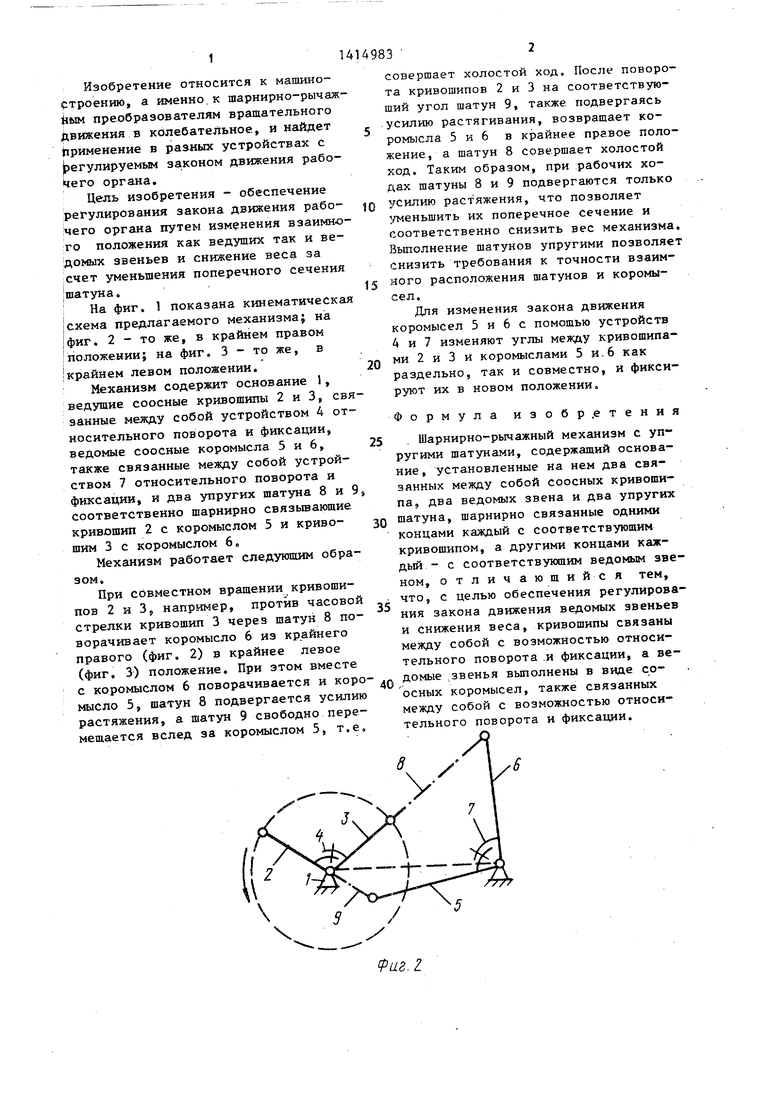
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-коромысловый механизм Вахрушевых (варианты) | 2019 |
|
RU2822681C2 |
| Шарнирно-рычажный механизм шаговых перемещений | 1986 |
|
SU1414985A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| МЕХАНИЗМ С ВЫСТОЕМ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2282082C1 |
| Шарнирно-рычажный механизм | 1989 |
|
SU1696796A1 |
| Двигатель внутреннего сгорания | 1984 |
|
SU1229398A1 |
| Кривошипно-кулисный механизм с выстоем ведомого звена | 1988 |
|
SU1504433A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
Изобретение относится к шарнир- но-рычажным преобразователям вращательного движения в колебательное и найдет применение в устройствах с регулируемым законом движения рабочего oprai|a. Цель изобретения - обеспечение регулирования закона движе.ния за счет изменения.взаимного расположения как ведущих, так и ведомых звеньев и снижение веса за счет уменьшения поперечного сечения шатунов. При совместном вращении кривошипов 2 и 3 шатун 8 поворачивает коромысло 6 и связанное с ним коромысло 5 из крайнего правого в крайнее левое положение. При этом шатун 8 подвергается усилию растяжения, а шатун 9 совершает холостой ход. После поворота кривошипов 2.и 3 на соотт ветствукиций угол шатун 9, также подвергаясь усилию растяжения, возвращает коромысла 5 и 6 в крайнее правое положение, а шатун 8 совершает холостой ход. Односторонняя нагрузка только в сторону растяжения позволяет уменьшить поперечное сечение шатунов 8 и 9, а выполнение их упругими снижает требования к точности взаимного расположения звеньев. Для изменения закона движения рабочегЬ органа с помощью устройств 4 и 7 изменяют углы между кривошипами 2,3 и между коромыслами 5,6. 3 ил. § (Л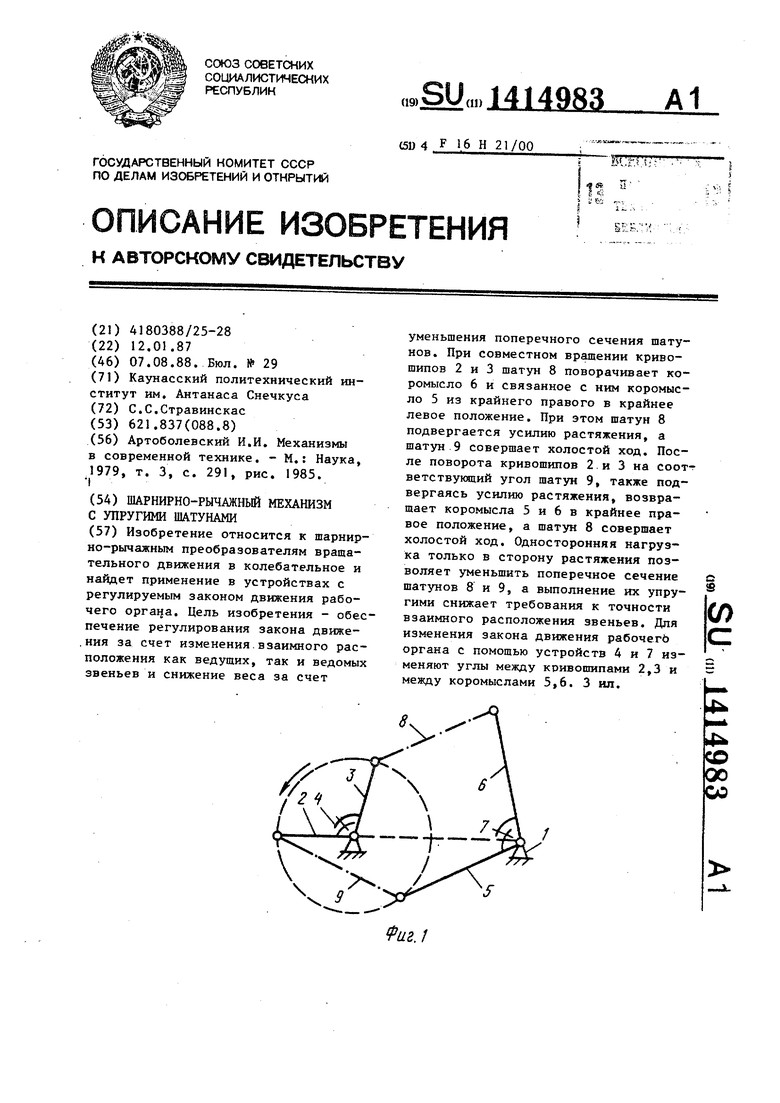
to./
Изобретение относится к машино- троению, а именно.к шарнирно-рычаж- йым преобразователям врашательного движения в колебательное, и найдет Нрименение в разных устройствах с регулируемым законом движения рабо- kero органа.
Цель изобретения - обеспечение регулирования закона движения рабо- :чего органа путем изменения взаимного положения как ведущих так и ве- ;домых звеньев и снижение веса за счет уменьшения поперечного сечения ;шатуна.
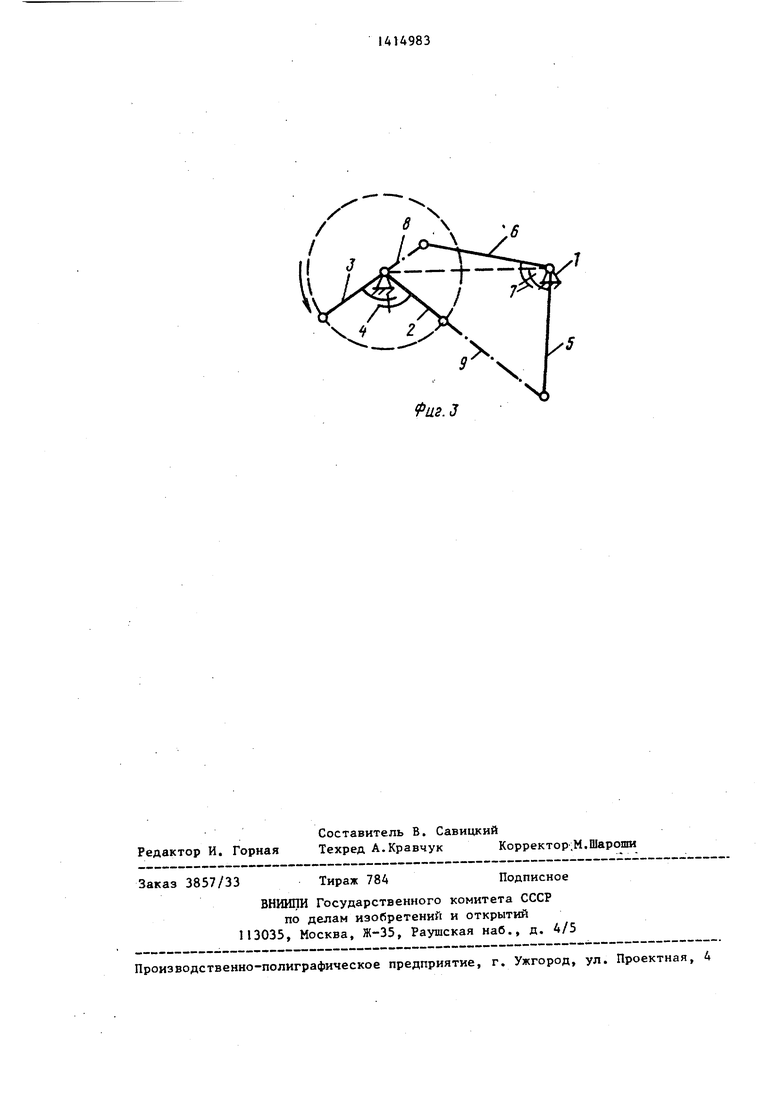
; На фиг. показана кинематическая |схема предлагаемого механизма; н;а 1ФИГ. 2 - то же, в крайнем правом положенииJ на фиг, 3 - то же, в I крайнем левом положении.
Механизм содержит основание 1, ведущие соосные кривошипы 2 и 3, связанные между собой устройством 4 относительного поворота и фиксации, ведомые соосные коромысла 5 и 6, также связанные между собой устройством 7 относительного поворота и фиксации, и два упругих шатуна 8 и 9 соответственно шарнирно связьшаюшие кривошип 2 с коромыслом 5 и криво- шим 3 с коромыслом 6 а
Механизм работает следуюпцш образом.
При совместном вращении кривошипов 2 и 3 например, против часовой стрелки кривошип 3 через шатун 8 поворачивает коромысло 6 из крайнего правого (фиг. 2) в крайнее левое (фиг. 3) положение. При этом вместе с коромыслом 6 поворачивается и коро мысло 5, шатун 8 подвергается усилию растяжения, а шатун 9 свободно перемещается вслед за коромыслом 5, т.е.
Q 5
0
5 О
Q
5
совершает холостой ход. После поворота кривошипов 2 и 3 на соответствую- ший угол шатун 9, также подвергаясь усилию растягивания, возвращает коромысла 5 и 6 в крайнее правое положение, а шатун 8 совершает холостой ход. Таким образом, при рабочих ходах шатуны 8 и 9 подвергаются только З силию растяжения, что позволяет .женьшить их поперечное сечение и соответственно снизить вес механизма. Выполнение шатунов упругими позволяет снизить требования к точности взаимного расположения шатунов и коромысел.
Для изменения закона движения коромысел 5 и 6 с помощью устройств 4 и 7 изменяют углы между кривошипами 2 и 3 и коромыслами 5 и.6 как раздельно, так и совместно, и фиксируют их в новом положении
Формула изобр.е тения
. Шарнирно-рычажный механизм с упругими шатунами, содержащий основание , установленные на нем два связанных между собой соосных кривошипа, два ведомых звена и два упругих шатуна, шарнирно связанные одними концами каждый с соответствующим кривошипом, а другими концами каж- дьй - с соответствующим ведомым звеном, отличаюшийся тем, что, с целью обеспечения регулирования закона движения ведомых звеньев и снижения веса, кривошипы связаны между собой с возможностью относительного поворота .и фиксации, а ведомые звенья выполнены в виде соосных коромысел, также связанных между собой с возможностью относительного поворота и фиксации.
Редактор И. Горная
Составитель В. Савицкий
Техред А.Кравчук Корректор;М.Шароши
Заказ 3857/33
Тираж 784
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
fus.3
Подписное
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СТЕРЕООЧКИ | 1920 |
|
SU291A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
