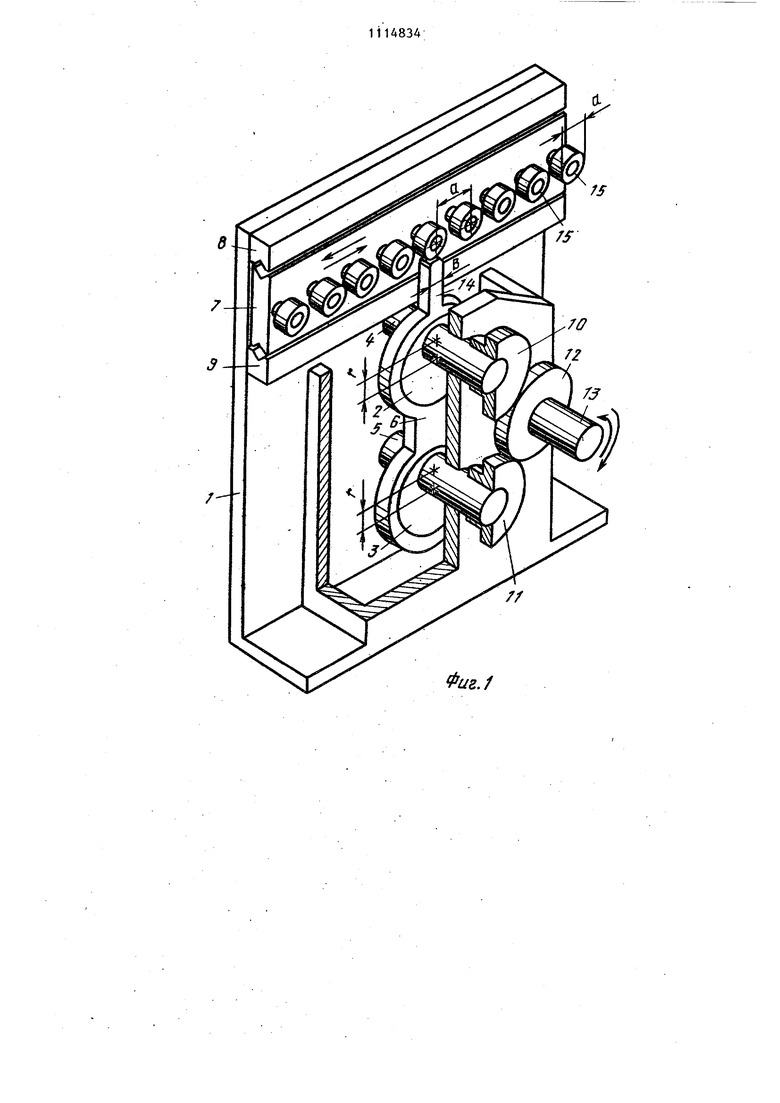
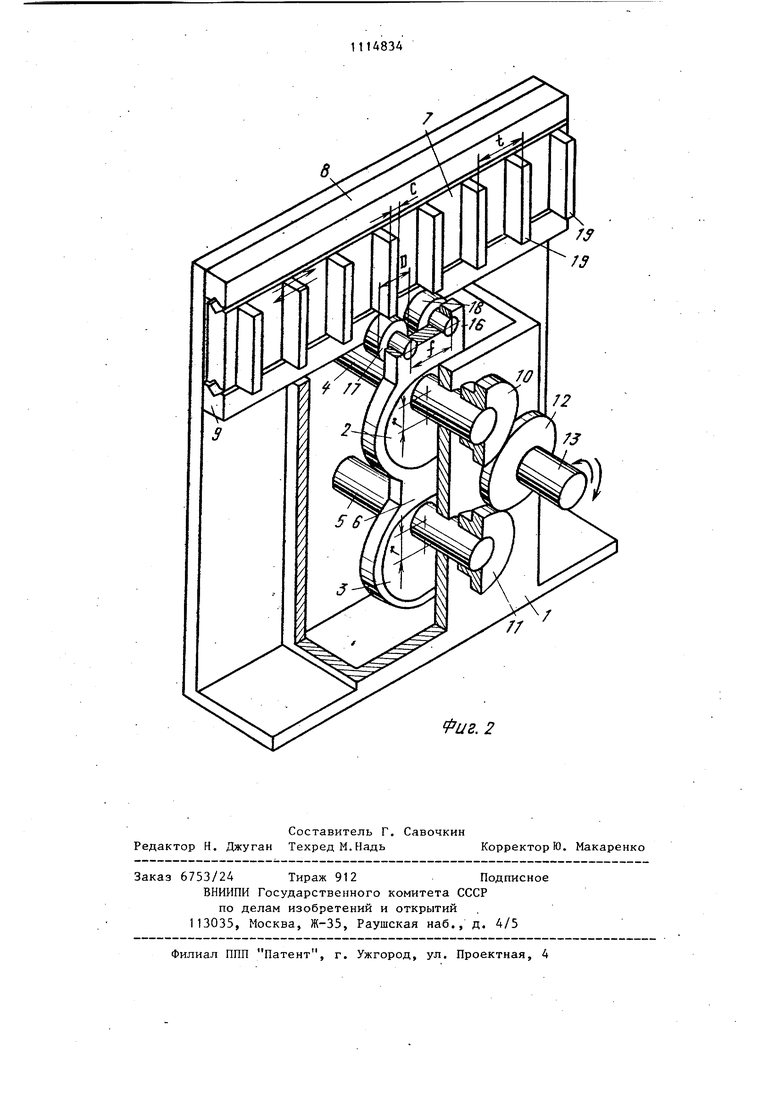
Изобретение относится к машиностроению а именно к устройствам, обеспечивающим реверсивное безударное шаговое перемещение ведомых звеньев, исполнительных механизмов, например массивных кареток, применяемых в сборочном и другом технологическом оборудовании при производстве полупроводниковых приборов и интегральных микросхем. Известен механизм шагового пере мещения, содержащий шарнирный четырехзвенник, поводок, размещенный на плоской пружине, соединенный с шатуном, ведомое звено с опорными элемен тами, взаимодействующими с поводком, Наиболее близким к изобретению техническим решением является механизм шагового перемещения, содержащий шарнирный четьфехзвенник, поводок, размещенный на шатуне, ведомое звено с опорными элементами, взаимодействующими с поводком 2. Недостатками известных механизмов являются наличие,.зазора между поводком и опорными элементами ведом го звена, причем между опорными элементами и поводком возникает трение скольжения, все это ухудшает динамические характеристики механизмов при быстром перемещении ведомых звеньев большой массы, например, кареток в технологическом оборудовании, что приводит к понижению надежности и долговечности механизма. Целью изобретения является повышение надежности и долговечности ме ханизма. Поставленная цель достигается тем, что в механизме шагового перемещения., содержащем шарнирный четырехзвенник, поводок, размещенный на шатуне, ведомое звено с опорными элементами,. взаимодействующими с поводком, четырехзвенник представляет собой параллелограмм, радиус кривошипа которого равен половине шага а размещения опорных элементов последние выполнены в виде цевок, толщина b поводка рассчитана по а формуле Ъ а - d. где d - диаметр цевки. По второму варианту исполнения механизма шагового перемещения четьфехзвенник представляет собой параллелограмм, радиус кривошипа равен половине шага t размещения опорных элементов, последние выполнены в виде выступов, а поводок - в виде кронштейна с размещенньми на нем по крайней мере двумя цевками, взаимодействующими с выступами, а параметры механизма выбраны из условия с f - D; D t - с, где с - толщина выступа; f - расстояние между цевками; D - диаметр цевки. На фиг. 1 изображено конструктивное исполнение механизма шаго.вого перемещения по первому вариан-. ту; на фиг. 2 - то же, по второму варианту. Механизм шагового перемещения содержит корпус 1, шарнирный параллелограмм, который состоит из кривошипов 2 и 3, выполненных в виде расширенных втулок, зафиксированных на валах 4 и 5, и шатуна 6, ведомое звено, выполненное в виде каретки 7, установленной с возможностью возвратно-поступательного перемещения в направляющих 8 и 9, и привод звеньев шарнирного параллелограмма,выполненных в виде зубчатых колес 10 и 11, зафикси-. рованных на валах 4 и 5, и зубчатого колеса 12, размещенного на приводном валу 13. На шатуне 6 размещен поводок, в первом варианте исполнения механизма выполненный в виде стержня 14, а ве-домое звено - каретка 7 снабжено опорными элементами, предназначенными для перемещения ведомого звена, выполненными в виде цевок 15, взаимодействующих с поводком - стержнем 14 (Фиг. 1). Шаг а размещений опорных элемен.тов - цевок 15 на ведомом звене каретки 7 равен расстоянию между смежными цевками 15, а толщина b поводка - стрежня 14 вьтолнена равной в соответствии с соотношением b а - d, где d - диаметр цевки. Согласно второму варианту исполнения механизма шагового, перемещения поводок выполнен в виде кронштейна 16, на котором размещены две цевки 17 и 18, а опорные элементы ведомого звена - каретки 7 выполнены в виде выступов 19, взаимодействующих с цевками 17 и 18 поводка при перемещении ведомого звена - каретки 7 (фиг. 2),
31
Шаг t размещения опорных элементов - выступов 19 на ведомом звене каретке 7 равен расстоянию между сме ными выступами 19, а толщина аждого выступа 19 выполнена равной в соответствии с соотношением
с f - D где f - расстояние между цевками 17
и 18;
D - диаметр цевок 17 и 18, причем диаметр D цевок 17 и 18 выбран из соотношения D -С t - с;
Радиус г кривошипа 2 и 3 шарнирного параллелограмма выполнен равным половине шага размещения опорных элементов (цевок 15 или выступов 19) на ведомом звене - каретке 7.
Механизм шагового перемещения работает следующим образом.
Кривошипы 2 и 3 шарнирного параллограмма приводятся во вращательное :движение от приводного вала 13 через зубчатое колесо 12 и зубчатые колеса ;10 и 11, при этом шатун 6 совершает поступательное перемещение по окружности,
В процессе движения шатуна 6 поводок последовательно взаимодействует с опорными элементами ведомого звена - каретки 7, осуществляя шаговое перемещение каретки 7, причем за один оборот кривошипов 2 и 3 происходит перемещение каретки 7 .на один шаг, равный удвоенному радиусу г.
В одном варианте конструктивного исполнения механизма шагового перемещения поводок, выполненный в виде стержня 14, при взаимодействии с опорными элементами - цевками 15 ведомого звена - каретки 7, входит без зазора в промежуток между цевками 15
344
осуществляя безударное перемещение каретки 7 (фиг. 1).
По второму варианту конструктивного исполнения механизма шагового перемещения цевки 17 и 18, размещенные на кронштейне 16, последовательно взаимодействуют с каждым из выступов 19 ведомого звена - каретки 7, осуществляя безударное ее шаговое
перемещение, причем во время шагового перемещения каретки 7 выступы 19 размещаются без зазора в промежутки между цевками 17 и 18 (фиг. 2).
При вращении кривошипов 2 и 3 пс
часовой стрелке осуществляется шаговое перемещение ведомого звена каретки 7 слева направо, а при вращении кривошипов 2 и 3 против часовой стрелки - справа налево.
Во время холостого хода механизма, т.е. во время выстоя, ведомое звено каретка 7 удерживается от самопроизвольного смещения шариковым фиксатором (не показан).
Таким образом, предлагаемый механизм шагового перемещения позволяет осуществить быстрое безударное шаговое перемещение ведомого звена, имеющего значительную массу, например,
каретки, так как в первом варианте исполнения поводок без зазора размещается между смежными цевками, а во втором варианте - выступ без зазора размещается между роликами кронштейна, что препятствует самопроизвольному смещению ведомого звена под действием возникающих во время движения инерционных и возмущающих усилий. Кроме того, при взаимодействии поводка с опорными элементами трение скольжения заменено трением качения, что значительно повьш1ает долговечность механизма.
1114834
7
7S
/
иг.2
1. Механизм шагового перемещения, содержащий шарнирный четырехзвенник, поводок, размещенный на шатуне, ведомое звено с опорными элементами, взаимодействующими с поводком, отличающийся тем, что, с целью повышения надежности и долговечности механизма, четырехзвенник представляет собой параллелограмм, радиус кривошипа которого равен половина шага а размещения опорных элементов, последние выполнены в виде цевок, а толщина Ь поводка рассчитана по формуле b а - d, где d - диаметр цевки. 2. Механизм шагового перемещения, содержащий шарнирный четырехзвенник, поводок, размещенный на шатуне, ведомое звено с опорными элементами, взаимодействующими с поводком, о тличающийся тем, что, с целью повышения надежности и долговечности механизма, четырехзвенник представляет собой параллелограмм, радиус кривошипа которого равен половине шага t размещения опорных элементов, последние выполнены в виде выступов, а поводок - в виде крон(Л штейна с размещенными на нем по крайней мере двумя цевками, взаимодействующими с выступами, а параметры механизма выбраны из условия c f-D;Dft-c, где с - толщина выступа; f - расстояние между цевками; D - диаметр цевки. 4i эо со J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство анодов катодных ламп | 1923 |
|
SU410A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, механизм № 736 (прототип) . | |||
