О)
;о 4;
tf
Изобретение относится к пневмати- |Ческим устройствам управления и може ;быть использовано для управления автоматическими технологическими машинами, промышленными роботами и робототехнологическими комплексами.
Цель - упрощения конструкции.
Схема устройства приведена на ;чертеже.
Устройство управления содержит блок 1 управления, программный блок ;2j командо задающий блок 3, блок 4 выходных усилителей и блок 5 конечных выключателей с инверсными выходами.
Блок 1 управления снабжен пневмо- Тумблером 6, пневмокнопками 7, 8 с логическими элементами ИЛИ 9 - 12 и усилителем 13. Выход тумблера 6 соединен с входом элемента 9, прямой вход которого соединен с входом кнопки 8, а инверсный выход - с входом Элемента ИЛИ 10. Второй вход эле- Иента ИЛИ 10 соединен с выходом кнопки 7. Инверсный выход элемента ИЛИ i11 соединен с входом элемента ИЛИ 1 2, а инверсный выход элемента ИЛИ 12 соединен с входом элемента ИЛИ 1 1 , т.е. элемен1Ъ1 11 и 12 образуют триггер с раздельными входами. Второй вход элемента 11 соединен с выходом элемента 10, а второй вход элемента 12 - с выходом кнопки 8. Лрямой выход элемента 11 соединен с каналом управления усилителя 13, выход которого .подведен к программному блоку 2,
Программный блок 2 содержит много входовые элементы ИЛИ 14 и элементы НЕ 15 и 16. Входы элементов 14 через каналы наборного поля 17 соединены с выходами блока 5. Наборное поле 17 условно показано в виде зачерненных кружков в точках соединения выходов блока 5 с входами элементов 14.
Командозадающий блок 3 содержит ячейки 18 для управления исполнительными механизмами роботов и ячейки 19 для управления тагшологическими мадш нами. (На чертеже показана одна ячейка 18 и одна ячейка памяти 19). Каждая ячейка 18 предназначена для подачи и сохранения в памяти двух команд одному звену промьипленного робота (напрШ ерз для подачи команд Выдвинуть и Втянуть звену горизонтального перемещения руки). Каждая ячейка 19 предназначена для подачи команда включения однор техно0
5
0
5
0
5
0
5
0
5
логической машине, для сохранения этой команды в памяти, для снытия команды при определенном состоянии технологической машины и для формирования сигнала о срабатьшании машины.
Ячейка 18 содержит логические многовходовые элементы ИЛИ 20 - 23.
Элементы 22 и 23 соединены по схеме триггера с раздельными входами. Прямые входы элементов 20 и 21 предназначены для подвода команд к исполнительным механизмам робота от элементов 15, 16. Прямые выходы элементов 20, 21 соединены соответственно с прямыми входами элементов 22 и 23, а прямь е выходу: элементов 22 и 23 соединены с управляющими входами выходных усилителей 24 блока 4.
Ячейка 19 содержит логические элементы ИЛИ 25 - 29 и усилители 30, 31 . Элемент 25 с .элементом 26, а также элемент 27 с элементом 28 соединены по схеме триггеров с раздельными входами и образуют соответственно триггеры включения и выключения машины.
Свободный прямой вход элемента 25 предназначен для подачи командь технологической машине от соответствующего элемента 15 (16). Прямой выход элемента 25 соединен с входом выходного усилителя 24 блока 4. Прямые входы элементов 27 и 29 соединены с конечным выключателем 32 блока 5. Прямой выход элемента 27 соединен с инверсным входом элемента 25, являющимся входом сброса триггера включения. Прямой вход элмента 28 предназначен для подачи сигнала включения триггера выключения.
Прямой выход элемента 28 соединен с входом элемента 29. Прямой выход элемента 29 соединен с управляющим входом усилителя 31, а инверсный выход - с управляющим входом усилителя 30. Выходы усилителей 30 и 31 соединены с каналами наборного поля 17 блока 2.
Блок 5 конечных выключателей и датчиков содержит конечные выключатели 32 тех ологических машин, конечные выключатели 33 звеньев промьш1лен- ного робота и датчики, например, электропневмопреобразователи 34.
Перед включением устройства в работу на наборном поле 17 для каждого элемента 14 оставляют открытыми
тели блока 5, при срабатывании которых на выходе соответствующего элемента 15 црлжка быть сформирована команда управления. Остальные входы элементов 14 перекрываются заглушками.
Устройство работает следующим образом.
Длязадания автоматического режима работы тумблер 6 следует перевести в положение Автомат. При этом на выходэ тумблера и на входе элемента 9 появляется сигнал 1
выходе элемента 9, а также на входе кнопки 8 также появляется сигнал 1. После нажатия кнопки 8 сигнал 1 появляется на ее выхоДе и на входе логического элемента 12. На инверс- i ном выходе элемента 12 появляется сигнал О, который поступает на вход логического элемента 11, Так как по второму входу элемента 11 сигнал то1416941
руки робота), то канал питания датчика переключается на атмосферу и на выходе датчика 34, а также на данном входе элемента 15.появляется сигнал О. Таким образом, на всех входах элемента 15 имеются сигналы О, поэтому на инверсных выходах элементов 15 и 16 появляется сигнал 1, т.е. сигнал подачи данной команды.
Допустим, что эта команда (например, Выдвинуть руку) подается на входе логического элемента 20. Тогда на выходе элемента 20 и входе элемен- На прямом 5 та 22, а также на прямом выходе эле10
20
мента 22 и на входе соответствующего усилителя 24 появляется сигнал 1, в результате чего соответств тощее звено робота переходит в другое положение (рука выдвигается). Поскольку элементы 22 и 23 соединены по схеме триггера с раздельньпчи входами, то сигнал на выходе элемента 22 сохраняется и после того, как HI выходе
же О, то на выход элемента 11 и на 25 элемента 20 появляется сигнал О
(после ухода руки с исходного положения). Сигнал на выходе элемента 22 станет О л1-шь при подаче сигнала Г на вход элемента 21 (т.е. при подаче команды Втянуть руку).
управляющий вход усилителя 13 поступает сигнал О, в результате чего на выходе усилителя 13 тоже появля- етСя сигнал О, который разрешает
работу устройства в автоматическом режиме.
Если звено промышленного робота находится в требуемом положении, то струя воздуха в соответствующем коненом выключателе 33 перекрыта и в со- ответствзтощий канал поля 17 воздух не поступает, т.е. на входы всех элементов 14, соединенных с этим каналом, поступает сигнал О. Если технологическая машина находится в требуемом состоянии, то канал питания соответствующего усилителя 30 или 31 переключается на атмосферу, и к соответствующему каналу поля 17 воздух также не поступает. Если все звенья промьпиленного робота заняли требуемое для конкретной команды положение, а также все запрограммированные технологические машины находятся в требуемом состоянии, то на все входы данного логического элемен та 14 поступают сигналы О, поэтому на выходе его и на соответствзтощем входе логического элемента 15 появляется сигнал О. Если при этом и -1еет- ся электрический сигнал на датчике 34, допустим, подключенном к одному из свободных входов элемента 15 (на
пример, имеется заготовка на схвате
5
10
0
мента 22 и на входе соответствующего усилителя 24 появляется сигнал 1, в результате чего соответств тощее звено робота переходит в другое положение (рука выдвигается). Поскольку элементы 22 и 23 соединены по схеме триггера с раздельньпчи входами, то сигнал на выходе элемента 22 сохраняется и после того, как HI выходе
25 элемента 20 появляется сигнал О
30
(после ухода руки с исходного положения). Сигнал на выходе элемента 22 станет О л1-шь при подаче сигнала Г на вход элемента 21 (т.е. при подаче команды Втянуть руку).
Допустим теперь, что команда 1 подается логическому элементу 25 для управления технологической маш1шой. Тогда на прямом выходе элемента 25 и на. управляющем входе соответствую35 щего усилителя 24 появляется сигнал 1 и включается данная технологическая машина. Сигнал 1 на прямом выходе элемента 25 сохраняется и после снятия сигнала 1 с его входа.
После ухода исполнительного механизма технологической машины с исходно- То положения на выходе конечного выключателя 32, а также на соответствующих входах логических элементов
45 27 и 29 появляется сигнал 1. На
прямом выходе элемента 27 также по- S является сигнал 1, которьш поступает на инверсный вход элемента 25, в связи с чем на прямом выходе этого элемента и на управляющем входе
50
усилителя 24 появляется сигнал О
т.е. команда включения технологической машины снимается. На прямом выходе логического элемента 28 и соответствующем входе элемента 29 появляется сигнал О, так как на инверсном выходе элемента 27 появляется сигнал О, а на свободном входе элемента 28 - сигнал О, Несмотря на это сигнал 1 на прямом выходе элемента 29 сохраняется, так как по второму входу элемента 29 поступает сип1ал конечного выключателя 32. Поэтому усилитель 31 по-преж- на управляющем входе имеет сиг- Нал 1, канап питания его переключен на атмосферу и на его выходе имеется сигнал О (технологическая машина не сработала), который подведен к соответствующему каналу 17. Когда исполнительный механизм техно- Логической машины возвращается в исходное положение, на выходе конечного выключателя 32 появляется сигнал О. На выходе элемента 27 сигнал 1 |сохраняется, но на прямом выходе элемента 29 появляется сигнал О, |а на инверсном выходе е.го - сигнал 1. Поэтому на выходе уси-пителя 31 появляется сигнал 1, а на выходе усилителя 30 появляется сигнал О (технологическая машина сработала). Чтобы поготовить данную ячейку для работы в следующем цикле, необходимо подать команду на свободньш вход элемента 28. При этом на прямом выходе элемента 28, а также на входе и на прямом выходе элемента 29 появляется сигнал 1, а на инверсном выходе его - сигнал О. Усилители 30 и 31 меняют выходные сигналы, т.е. сигнал О появляется на выходе усилителя 31 (технологическая машина не сработала), а на прямом выходе элемента 27 появляется сигнал О, т.е. сигнал запрета с инверсного входа элемента 25 снимается И этот элемент может реагировать на следующую команду по его свободному прямому входу.
Автоматический режим работы прекращается при нажатии кнопки 7 и-пи при переводе тумблера 6 в положении Наладка. В обоих случаях на входе логического элемента 10 появляется сигнал 1, поэтому на его выходе, а также на входе и прямом выходе логического элемента 11 тоже появляется сигнал 1, который ус шитель
14169416
технологическим машинам можно пода7 вать подводом сигнала 1 к неиспользованным входам логических элементов 20 и 21.
изобретения
1. Пневматическое логическое устройство управления , содержащее блок .
10 управления, блок конечных выключателей с инверсными выходами, программный блок и командезадающий блок с ячейками управления исполнительными механизмами роботов, каждая из кото15 рых выполнена в виде подключенного к выходам первых многовходовых элементов ИЛИ триггера с раздельными входами, взаимно инверсные выход : которого связаны с выходными усили20 телями, отличающееся тем, что, с целью упрощения конструкции, программный блок состоит из вторых многовходовых элементов ИЛИ, соответствующие входь которых параллель25 но соединены с выходами блока управления и конечных выключателей через каналы наборного поля, снабженные заглушками в соответствии с программой управления, причем выходы вторых
30 многовходовых элементов ИЛИ через элементы НЕ связаны с соответствующими входами первых многовходовых элементов ИЛИ, ячеек управления ис- nOwTH и тельными механизмами роботов.
25 2. Устройство по п. 1, о т л и ч а о щ е е с я тем, что командо- задающий блок снабжен ячейками управления технологическими машинами, каждая из которых содержит триггер
40 включения и триггер выключения машины, выполненные в виде триггеров с раздельными вводами, и двухвходовый элемент 1-ШИ с взаимно инверсными выходами, причем прямой выход триг45 гера включения соединен с входом выходного усилителя, прямой выход триггера выключения сообщен с первым входом элемента ИЛИ, второй вход которого и вход сброса триггера вы-50 ключения связаны с выходом конечного выключателя технологической машины, инверсный выход триггера выключения сообщен с входом сброса триггера включения, прямой и инверсный выходы
50 ключения связаны с выходом конечного выключателя технологической машины, инверсный выход триггера выключения сообщен с входом сброса триггера включения, прямой и инверсный выходы
13 переводит в другое положение. На
выходе усилителя 13 появляется сигнал
1, который через канал 17 блокирует элемента ИЛИ подключены к входам
работу всех логических элементов 14.программного блока, а включающие вхоВ наладочном режиме (при положенииды триггеров включения и выключения
Наладка пневмотумблера 6) команда ,соединены с выходами соответствующих
звеньям промьпиленного робота илиэлементов НЕ программного блока.
изобретения
1. Пневматическое логическое устройство управления , содержащее блок .
управления, блок конечных выключателей с инверсными выходами, программный блок и командезадающий блок с ячейками управления исполнительными механизмами роботов, каждая из которых выполнена в виде подключенного к выходам первых многовходовых элементов ИЛИ триггера с раздельными входами, взаимно инверсные выход : которого связаны с выходными усилителями, отличающееся тем, что, с целью упрощения конструкции, программный блок состоит из вторых многовходовых элементов ИЛИ, соответствующие входь которых параллельно соединены с выходами блока управления и конечных выключателей через каналы наборного поля, снабженные заглушками в соответствии с программой управления, причем выходы вторых
многовходовых элементов ИЛИ через элементы НЕ связаны с соответствующими входами первых многовходовых элементов ИЛИ, ячеек управления ис- nOwTH и тельными механизмами роботов.
2. Устройство по п. 1, о т л и ч а о щ е е с я тем, что командо- задающий блок снабжен ячейками управления технологическими машинами, каждая из которых содержит триггер
включения и триггер выключения машины, выполненные в виде триггеров с раздельными вводами, и двухвходовый элемент 1-ШИ с взаимно инверсными выходами, причем прямой выход триггера включения соединен с входом выходного усилителя, прямой выход триггера выключения сообщен с первым входом элемента ИЛИ, второй вход которого и вход сброса триггера вы-ключения связаны с выходом конечного выключателя технологической машины, инверсный выход триггера выключения сообщен с входом сброса триггера включения, прямой и инверсный выходы
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство циклового программного управления | 1987 |
|
SU1472874A1 |
| Программное управляющее и контролирующее устройство | 1980 |
|
SU951238A1 |
| Способ ориентации деталей | 1983 |
|
SU1152765A1 |
| Устройство для дистанционного программного управления электроприводными механизмами | 1984 |
|
SU1226508A1 |
| Устройство управления дозатором | 1987 |
|
SU1647522A1 |
| Устройство для электроискрового нанесения покрытий на металлическую ленту | 1987 |
|
SU1437171A1 |
| Устройство для управления робототехнологическим комплексом | 1980 |
|
SU911464A1 |
| Пневматическая логическая система управления | 1971 |
|
SU881717A1 |
| Устройство для контроля параметров контактов реле | 1981 |
|
SU1023434A1 |
| Устройство для циклового программного управления манипуляторами | 1982 |
|
SU1176303A1 |
Изобретение относится к устройствам управления и может быть исполь/ зовано для управления машинами и роботами. Цель изобретения - упрощение конструкции устройства. Устройство содержит блок 1 управления, программный блок 2, командозадающий блок 3, блок 4 усилителей и блЬк 5 конечных выключателей. Программньй блок 2 содержит многовходовые элементы ИЛИ 14 и элементы НЕ 15 и 16. Входы элементов 14 через каналы наборного поля соединены с выходами конечных выключателей. Командозадающий блок содержит ячейки 18 управления исполнительными механизмами и ячейки 19 управления технологическими машинами. В каналах наборного поля 17 установлены заглушки в соответствии с программой управления. 1 з.п. ф-лы, 1 ил. i (Л с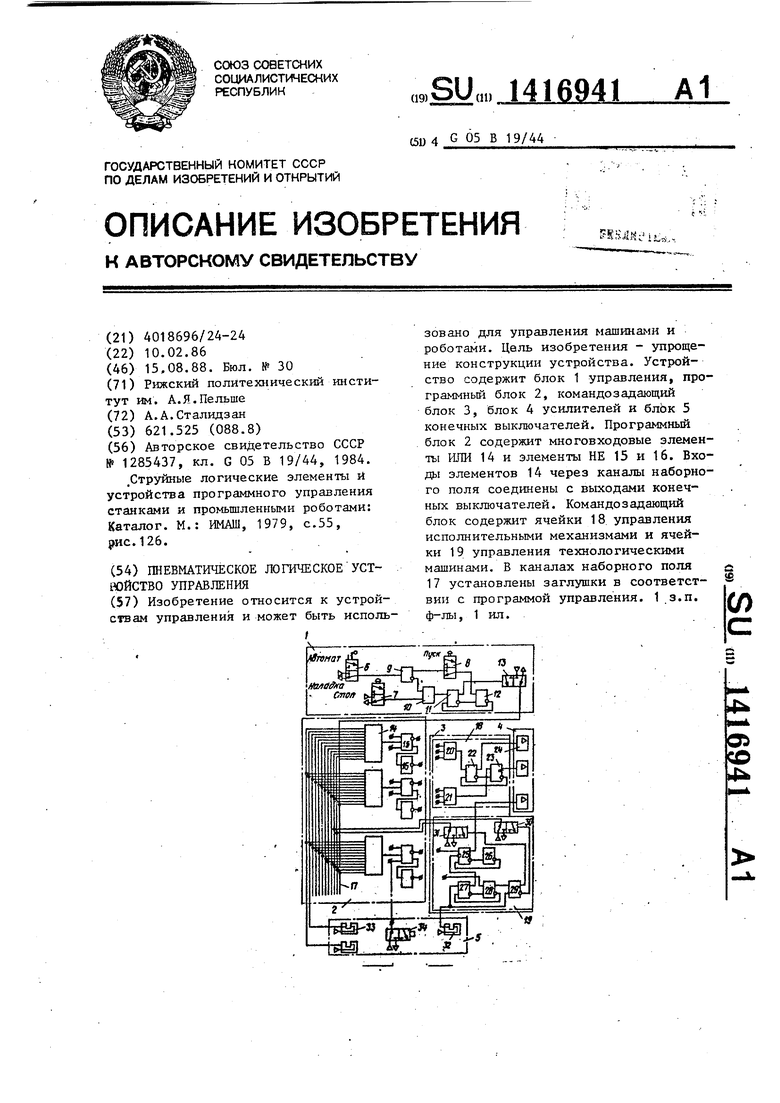
| Пневматическая логическая система управления | 1984 |
|
SU1285437A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Струйные логические элементы и устройства программного управления станками и промьшленными роботами: Каталог | |||
| М.: ИМАШ, 1979, с.55, .126. | |||
