Изобретение относится к пневматическим системам автоматического управления и может быть использовано при автоматизации объектов с циклическими процессами производства, характеризующихся дискретными технологическими операциями, HanpHt-iep металлорежущих станков, подъемно- транспортного оборудования, промьпп- ленных манипуляторов и т.п,
Цель изобретения расширение функциональных возможностей системы и повьш1ение удобства эксплуатации.
На фиг. 1 представлена структурная схема системы управленияj на фиг.2 - принципиальная схема блока разрешения операций; на фиг, 3 - принципиальная схема блока дистанционного управления, на фиг., 4 - принциприальная схе- ма блока формирования команд; на фиг, 5 - принципиальная схема программируемого блока задания исходного положения исполнительных механизмов ..
Система управления (фиг,1) состоит из блока 1 датчиков, связанного с блоком 2 разрешения операций, кото- рьш последовательно соедрп-1:ен через блок 3 дистанционного управления и блок 4 формирования команд с ; ыходны ми каналами 5, которые подключаются к исполнительным механизмам,
Блок 4 формирования команд также соединен с вькодами блока б задания исходного положения исполнительных механизмовJ в состав которого входит первое поле 7 набора программы. В состав блока разрешения операций вхо- дит второе поле 8 набора программы,
Информация о работе системы представляется с помощью блока 9 информации.
Блок 1 датчиков представляет собой совокупность датчиков ( ) положе- ния исполнительных механизмов, датчиков контроля технологических параметров и датчиков времен,И5 контролирующи длительность выполнения команд.
Блок разрешения операций состоит из многовходовых элементов И 10, число которых равно числу технологических операций} и многовходовьи элементов ИЛИ 115 число которьк равно числу выходных каналов 5,
Выход 12 первой многовходовой схемы связан с вьжлючагощим входом 13 блока 6 задания исходного положения исполнительньпс механизмов.
5
Q
„
с
п г
5
Каждый многовходовый элемент И выполнен в виде.одномембранных элементов 14, число которых: равно числу датчиков блока 1. Входные глухие камеры 15 элементов 14 параллельно подключе- ны каналами 16 к выходам датчиков. Сопла элементов 14 соединены с выходом многовходового элемента Иичерезоб- щий дроссель 17 - с каналом питания.
Каждый многовходовый элемент ИЛИ выполнен в виде одномембранных элементов 18, число которых равно числу технологических операций. Глухие входные камеры 19 элементов 18 через развязывающие дроссели 20 соединены с выходами соответствующих многовходовых элементов И, Сопло каждого элемента
18 соединено с проточнойкамерой 21 следующего элемента 18.Проточная камера , 9 первого элемента 18 сообщена с атмосферой, а сопло последнего элемента 18 -с выходом 22 многовходового элемента ИЛИ и через питающий дроссель 23 - с каналом питания 24.
Проточные камеры 25 элементов 14 и глухие входные камеры 19 элементов 18 связаны со штуцерами 26 второго поля 8 набора программы.
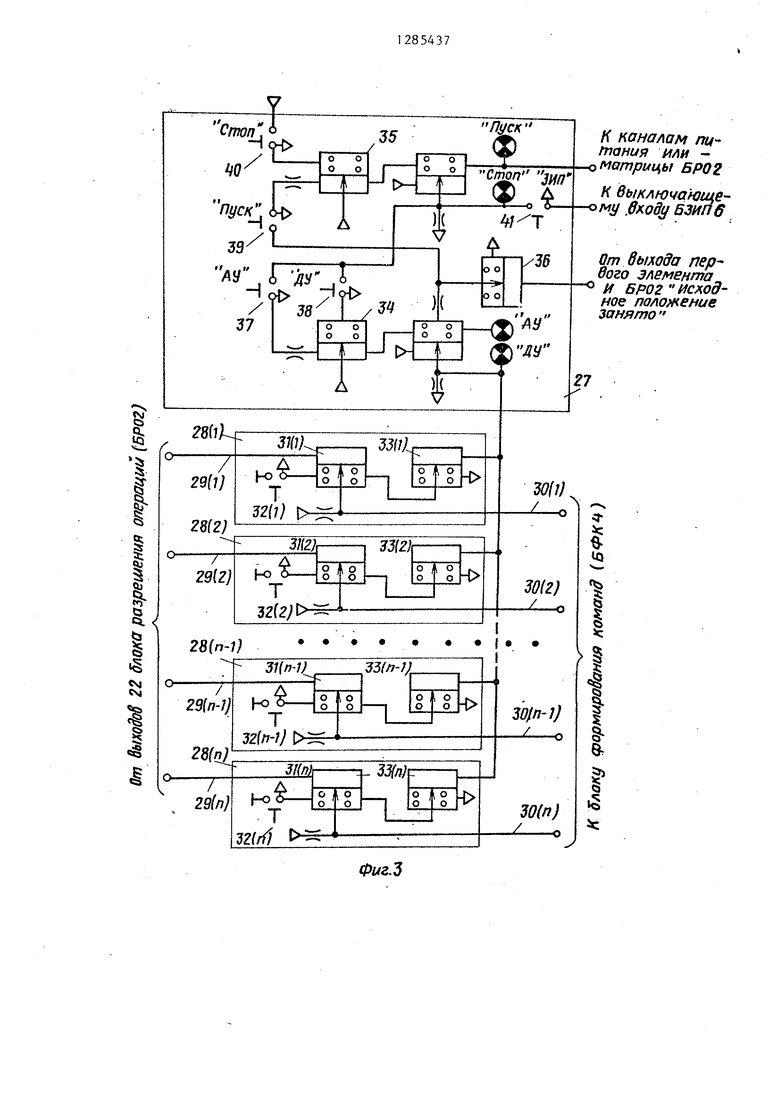
Блок 3 дистанционного управления (фиг.З) состоит из узла 27 задания режимов работы системы и двухвходо- вых элементов ИЛИ 28 (1)-28(п), причем первые входы 29(1)-29(п) связаны с выходами 22 блока 2, а вторые обье- динены и соединены с выходом ДУ узла 27. Выходы 30(1)-30(п) элементов , ИЛИ 28(1)-28(п) являются выходами блока 3. К проточным камерам элементов 31(1)-31(п) элементов ИЛИ 28(1)- 28(п) подключены пневмокнопки 32(1)- 32(п) так, что в исходном (ненажатом) состоянии сообщают эти проточные камеры с атмосферой. Вторые входы пнев- мокнопок 32 заглушены. Элементы ИЛИ 28 также включают элементы 33, г лу- хие входные камеры которых соединены с вторыми выходами элементов 28, Узел 27 состоит из элементов 34 и 35 памяти,элемента 36 блокировки, кнопок задания автоматического 37 и дистанционного 38 режимов управления, пуска 39, останова 40, кнопки 41 включения блока б, соединенной с его включающим входом 42 (фиг.1), В узле 27 установлены также соответствующие сигнализаторы.
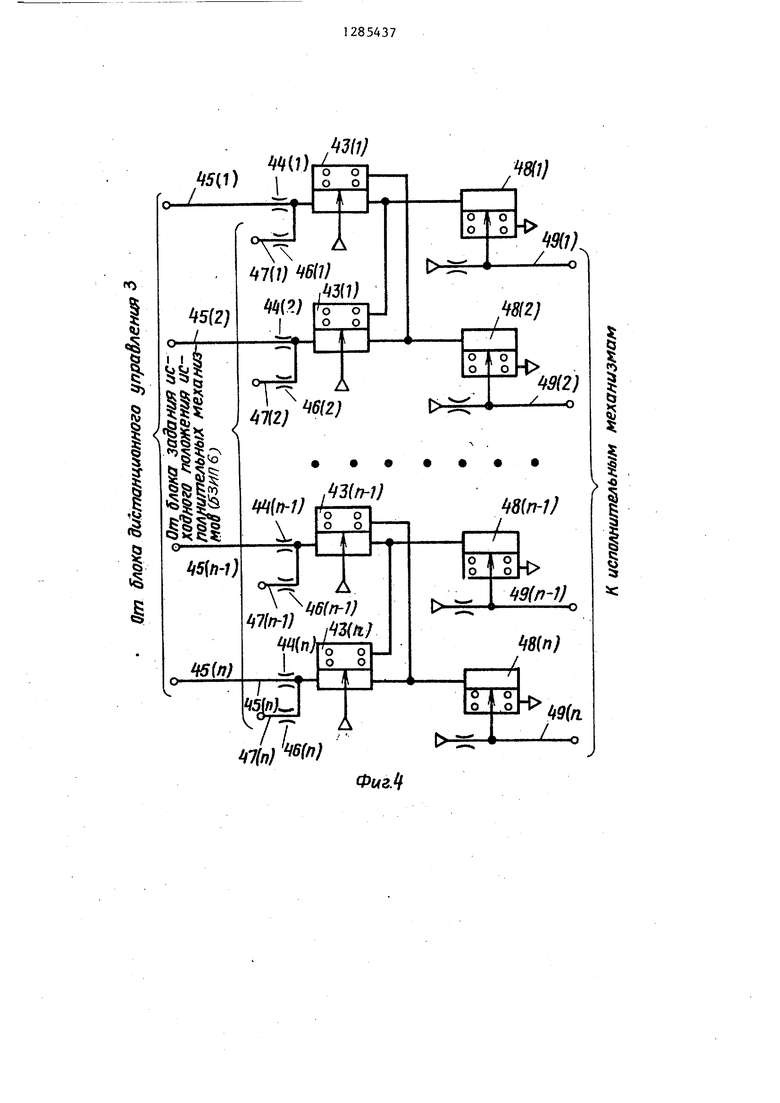
Блок 4 формирования,команд (фиг.4) состоит из элементов 43(1)-43(п) памяти, включающие входы которых через дроссели 44(1)-44(п) соединены с первыми входами 45(1)45(п) блока, предназначенными для соединения с блоком 3, и через дроссели 46(1)-46(п) - . с вторыми входами 47(1)-47(п), предназначенными для соединения с блоком 6. Выходы элементов 43(1)-43(п) памяти подключены к элементам ДА 48(1)- . 48(п),выполняющим функции буферного 10 каскада между блоком 4 и исполнительными механизмами, полости которых подключаются к выходным каналам 49(1 )- 49(п). Кроме того, элементы 43(1)- 43(п) памяти соединены попарно так, 15 что выключают друг друга, поскольку каждая из этих пар управляет работой одного исполнительного механизма двухстороннего действия.
Блок 6 задания исходного положе- 20 ваются. Сигнал Стоп может появить- ния исполнительных механизмов (фиг.5) ся и самостоятельно, если длительмирует сигнал выключения блока 6, ко торьпЧ одновременно поступает в блок информируя о выполнении команды. Далее кнопкой 37 система переводится в режим АУ и запускается в работу командой Пуск (кнопка 39). Сигналы от блока 1 поступают в блок 2, где обрабатываются в соответствии с заданной программой, в результате чего последовательно возбуждаются определенные выходы блока 2, сигналы кото- рых через блоки 3 и 4 поступают к ис полнительным механизмам. Параллельно на мнемосхеме (входит в состав блока 9) отражается ход технологического процесса. При подаче во время работы системы сигнала Стоп (кнопка 40) исполнительные механизмы отрабатывают текущее движение и останавли
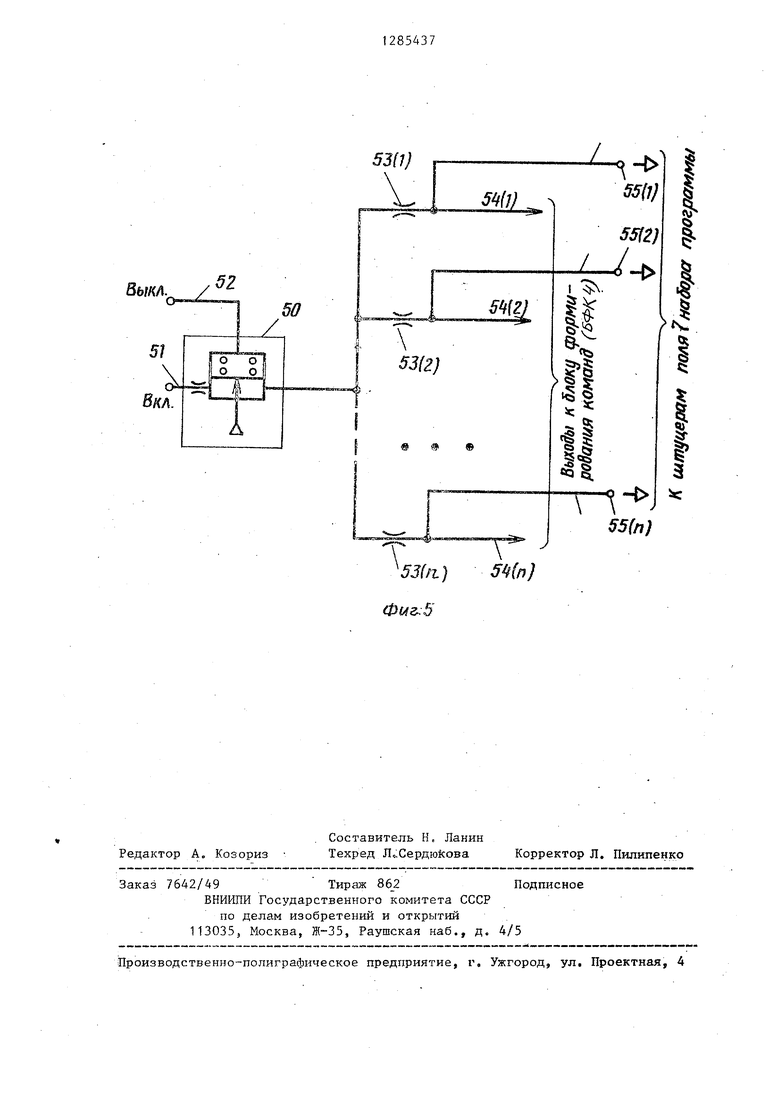
состоит из элемента 50 памяти, включающий вход 51 которого соединен с .включающим входом 42 блока, выключающий 52 - с выключающим входом 13 блока, а выход связан с входами дросселей 53, число которых равно числу выходных каналов 5. Выходы дроссе- -лей 53 соединены с выходами 54.блока и со штуцерами 55 первого поля 7 набора программы.
Перед включением системы в работу в соответствии с заданной циклограммой производится коммутация первого 7 и второго 8 полей набора программ путем установки заглушек на штуцеры, соответствующие работающим элементам в блоках 2 и 6. При этом программированием на втором поле В набора программы задается последовательность срабатывания исполнительных -механизмов, а на первом поле 7 набора программы - исходное положение исполнительных механизмов.
Система работает следующим обра- зом.
При включении питания автоматически устанавливаются режимы Стоп и ДУ, формируемые блоком 3. При подаче оператором сигнала ЗИП (за- нять исходное положение исполнительными механизмами) кнопкой 41 (через
блок 3) включается блок 6 и своими выходами включает заданные програмБлок 3 дистанционного управления (фиг.З) работает следующим образом. При включении питания элементы 34 и 35 памяти узла 27 выключены и на его вькодах формирзтотся сигналы Стоп и ДУ (дистанционное управление) . При этом отсутствует сигнал Пуск и обесточена ИЛИ-матрица бломой элементы 43 памяти блока 4, в ре-.55 а 2 (канал 24, фиг.2), т.е. блок зультате чего исполнительные механиз- 2 не формирует выходные сигналы и мы занимают исходное положение и пер- система не работает, возможно вклю- вая схема И блока 2 по каналу 12 фор- чение блока 6 при нажатии кнопки 41
мирует сигнал выключения блока 6, ко торьпЧ одновременно поступает в блок информируя о выполнении команды. Далее кнопкой 37 система переводится в режим АУ и запускается в работу командой Пуск (кнопка 39). Сигналы от блока 1 поступают в блок 2, где обрабатываются в соответствии с заданной программой, в результате чего последовательно возбуждаются определенные выходы блока 2, сигналы кото- рых через блоки 3 и 4 поступают к исполнительным механизмам. Параллельно на мнемосхеме (входит в состав блока 9) отражается ход технологического процесса. При подаче во время работы системы сигнала Стоп (кнопка 40) исполнительные механизмы отрабатывают текущее движение и останавли0
0
ность выполнения какой -либо команды превьшает контрольное время. После останова системы в любом месте про5 граммы ее можно воздействием на кнопку 41 вернуть в исходное положение подачей сигнала ЗИП. В режимах Пуск система не реагирует на сигналы изменения режимов ЗИП и ДУ, а также на сигналы дистанционного управления исполнительными механизмами (все они блокируются блоком 3). Для перевода системы из автоматического в режим дистанционного управле5 ния необходимо подать кнопками 40 и 38 команды Стоп и ДУ. После этого она не реагирует на сигнал Пуск до очередного перевода в автоматический режим и установки исходного положения, а работа с системой заключается в дистанционном управлении исполнительными механизмами через блок 3 (по-прежнему возможен возврат всех исполнительных механизмов в исходное положение по команде ЗИП).
Блок 3 дистанционного управления (фиг.З) работает следующим образом. При включении питания элементы 34 и 35 памяти узла 27 выключены и на его вькодах формирзтотся сигналы Стоп и ДУ (дистанционное управление) . При этом отсутствует сигнал Пуск и обесточена ИЛИ-матрица бло0
5
5 а 2 (канал 24, фиг.2), т.е. блок 2 не формирует выходные сигналы и система не работает, возможно вклю- чение блока 6 при нажатии кнопки 41
ЗИП (занять исходное положение); закрыты элементы 33(1)-33(п) элементов ИЛИ 28(1)-28(п) и возможно появление выходных сигналов блока 3 вканалах 30(1)-30(п). при нажатии соответствующих кнопок 32(1)-32(п) (собственно осуществление дистан- ционног.о управления исполнительными механизмами)i невозможна подача ком анды Пуск кнопкой 39 (осуществление блокировки); возможна подача команды АУ (автоматическое управление) кнопкой 37.
После подачи комнады АУ вклю- чается элемент 34 памяти, исчезает сигнал ДУ, открываются элементы 33(1)-33(п) и блок перестает реагировать на команды от кнопок 32(1)- 32(п) дистанционного управления исполнительными механизмами, так как теперь воздух из каналов 30(1)-30(п) сбрасьшается в атмосферу через открытые элементы 33(1)-33(п), становится возможной подача команды Пуск кнопкой 39, если исполнительные механизмы объекта в исходном положении и есть единичный сигнал в канале Исходное положение занято (формируется первой схемой И блока 2 канал 12, фиг.2), который закрывает элемент 36 (осуществление блокировки пуска при отсутствии исходного положения объекта управления). После подачи команды Пуск кнопкой 39 включается элемент 35 памяти, запитывается ШШ-матрица блока 2 и его выходные сигналы поступают на соответствующие входы 29(1)-29(пО, закрывая элементы 31(1)-31(п), что приводит к появлению сигналов на выходах 30(1)-30(п) (собственно авто- . матическая работа системы). Кроме того, исчезает сигнал Стоп и становится невозможной подача команд ЗИП кнопкой 41 и ДУ кнопкой 38 (осуществление блокировок).
Для остановки системы необходимо подать команду Стоп кнопкой 40. После выключения элемента 35 памяти становится возможным перевод системы в режим ДУ нажатием кнопки 38, приводящим к выключению элемента памяти 34.
Блок 4 формирования команд работает следующим образом.
В исходном состоянии все элементы 43(1)-43(п) памяти выключены и на выходах блока 49(1)-49(п) формируются нулевые сигналы. В режиме задания исходного положения исполнительных механизмов включается блок 5 и по каналам 47(1)-47(п) через дроссели 46(1)-46(п) включает соот- ветствуюидае элементы 43(1)-43(п) памяти, что приводит к появлению выходных сигналов в определенных каналах 49(1)-49(п) и перемещению исполнительных механизмов в требуемое ис- ходное положение. Далее, если система находится в режиме АУ - Пуск, сигналы от блока 3 поступают по каналам 45(1)-45(п) через дроссели 44(1)-44(п)к элементам 43(1)-43(п) памяти, вызывая их переключения. Соответственно изменяются и выходные сигналы в каналах 49(1)-49(п), заставляя перемещаться исполнительные механизмы в запрограммированном направлении. В режиме ДУ блок работает аналогично по командам от блока 3.
Блок 6 задания исходного положения исполнительных механизмов (фиг.5) функционирует следующим образом.
При включении блока по каналу 51 элемент 50 памяти запитывает все дроссели 53(1)-53(п), но воздух с их выходов сбрасывается в атмосферу через открытые штуцеры 55(1)-55(п). Сигналы появляются на тех его выходах 54(1)-54(п), номера которых соответ- ствуют номерам заглушенных штуцеров.
В блоках 2 и 6 образуются схемы Дроссельньгх делителей. Поэтому коли- чество подключаемых одномембранных элементов и соответственно число технологических операций выходных кана лов связано с сопротивлениями дроссе- лей и уровнями срабатывания элемен- . тов.
ормула изобретения
1. Пневматическая логическая система управления, содержащая последовательно соединенные блоки датчиков, разрешения операций и дистанционного управления, командные выходы которого связаны с первыми входами блока формирования команд, выходы которого связаны с выходными каналами, а таке блок информации, подключенньй к блокам датчиков, разрешения операций и дистанционного управления, причем блок разрешения операций выполнен с многовходовыми элементами И по числу технологических операций, параллельно
7
подключенными к выходам датчиков, и с многовходовыми элементами ИЛИ по
числу выходных каналов, о т л и ч а- ю щ а я. с я тем, что, с целью расширения функциональных возможностей и повышения удобства эксплуатации, она снабжена программируемым блоком задания исходного положения исполнительных механизмов, включающий вход которого соединен с кнопкой, установленной в блоке дистанционного управления, выключающий вход - с выходом первого многовходового элемента И блока разрешения операций, а выходы - с вторыми входами блока фор- мирования команд.
2, Система по п. 1, отличающаяся тем, что программнруемьй блок задания исходного положения ис полнительных механизмов выполнен в виде первого поля набора программы, элемента памяти и параллельно включенных дросселей по числу выходных каналов, причем включающий и выключающий входы элемента памяти соединены соответственно с включающим и выключающим входами программируемого блока задания исходного положения исполнительных механизмов, выход элемента памяти сообщен с входами дросселей, выходы которых соединены с выходами программируемого блока задания исходного положения исполнительных механизмов и со штуцерами поля набора программы.
85437
3. ю щ а
8
- е; 5
W
20
25
Система по п. 1, отлича- я с я тем, что блок разрешения операций снабжен вторым полем набора программы, причем каждый многовхо- довый элемент И выполнен в виде параллельно включенных одномембран- ных элементов по числу датчиков, глухие входные камеры одномембран- ных элементов соединены с входами многовходового элемента И, сопла сообщены с выходом многовходового элемента И и через общий дроссель - с каналом питания, каждый многовхо- довый элемент ИЛИ выполнен в виде последовательно соединенных одно- мембранных элементов по числу технологических операций,глухие входные камеры которых соединены через развязывающие дроссели с выходами соответствующих многовходовых элементов И, сопло каждого одномембран- ного элемента многовходового элемента ИЛИ сообщено с проточной камерой следующего одномембранного элемента, причем проточная камера первого одномембранного элемента подключена к атмосфере, а сопло последнего одно- мембранного элемента подключено к выходу многовходового элемента ШШ и через дроссель питания - к каналу питания, проточные камеры одномем- бранных элементов многовходовых элементов И и глухие входные камеры одномембранных элементов многовходо- 35 вых элементов ИЛИ связаны со штуцерами второго поля набора программы.
30
Стоп Н
W
Пуск
3d
.с
т
J/. i АГ1
Но{ 79
X 37
Ǥ
NJ
CM
4
5
Писк
о о о о
/1
7
(J) д Af вь / лю faнJU4e- .оду ВЗИП6
4КТ
/с каналам nt4- {лания или - -оматрицы БР02
О о
о о
И5б
От выхода первого элемента // 5яо, исмд- ное положение занято
1
1§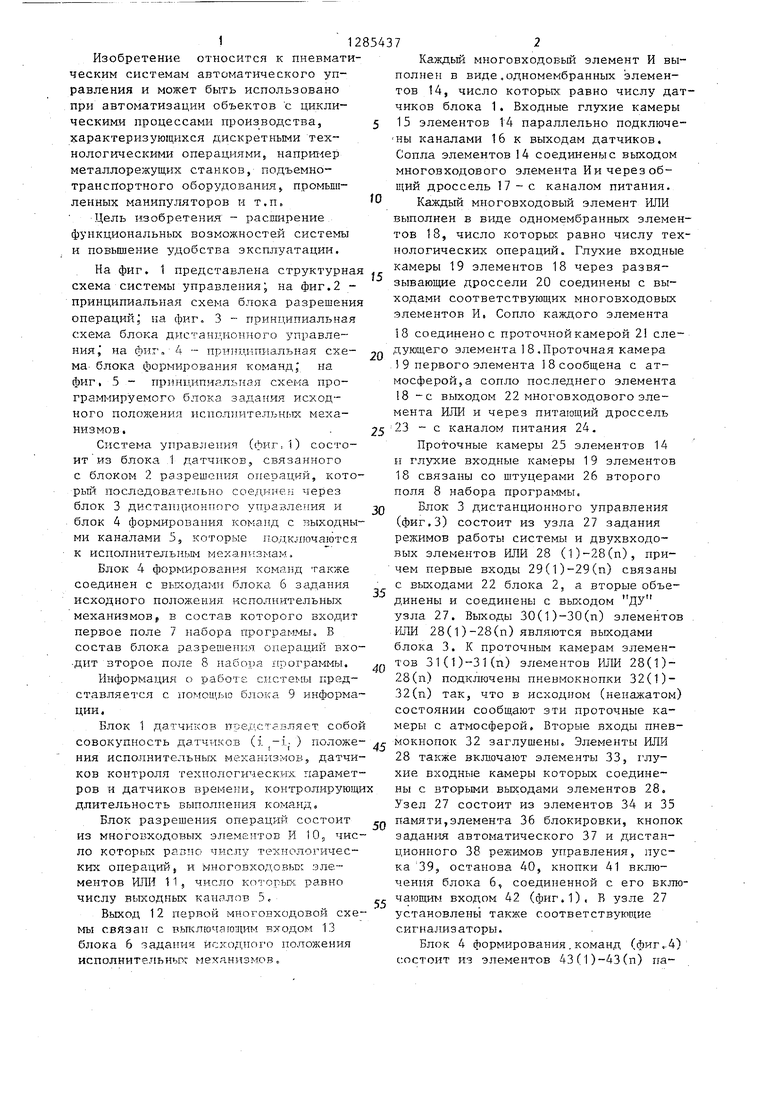
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство циклового программного управления | 1987 |
|
SU1472874A1 |
| Пневматическая система управления циклическими процессами | 1985 |
|
SU1339498A1 |
| Пневматическая логическая система управления | 1971 |
|
SU881717A1 |
| Устройство для дистанционного управления топливораздаточными колонками | 1982 |
|
SU1067472A1 |
| Устройство контроля и управления технологическим комплексом для намотки изделий | 1989 |
|
SU1661721A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| Автоматическая и дистанционная система для управления судовым двигателем внутреннего сгорания | 1982 |
|
SU1078116A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| Устройство для программного управления | 1984 |
|
SU1215089A1 |
Изобретение относится к пневматическим системам автоматического управления и может быть использовано при автоматизации объектов с циклическими процессами производства.Целью изобретения является расширение функциональных возможностей и повышение удобства эксплуатации. Пневматическая логическая система управления содержит последовательно соединенные блоки датчиков 1, разрешения операций 2, дистанционного управления 3 и формирования команд 4, а также блок 9 информации, подключенный к блокам датчиков, разрешения операций и дистанционного управления. Блок разрешения операций 2 выполнен с многовходовыми схемами И 10 по числу технологических операций, параллельно подключенными к выходам датчиков, и с многовходовьми схемами ИЛИ 11 по числу выходных каналов. Система снабжена программируемым блоком 6 задания исходного положения исполнительных механизмов, включающий вход которого соединен с кнопкой, установленной в блоке дистанционного управления, выключающий вход - с выходом первой много- входовой .схемы И блока разрешения операций, а выходы - с блоком формирования команд. 2 з.п. ф-лы, 5 ил. V) DO
Фиг.З
ro
Ǥ
fe
t3(: к Qj
|||| llll
5{П 1)
Wn)
1
)
о о о
ftlln-1)
A
(til
(
Д
7(n) W
Шп-1)
i
9(ЛS -о
Шп)
ft9{n
/
Фиг.
| Пневматическое программноеуСТРОйСТВО | 1978 |
|
SU807241A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ЛЕГКИХ ПРИМЕСЕЙ ИЗ СВЕКЛОВОДЯНОЙ СМЕСИ | 0 |
|
SU302096A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
