$;)
О)
tc
о ел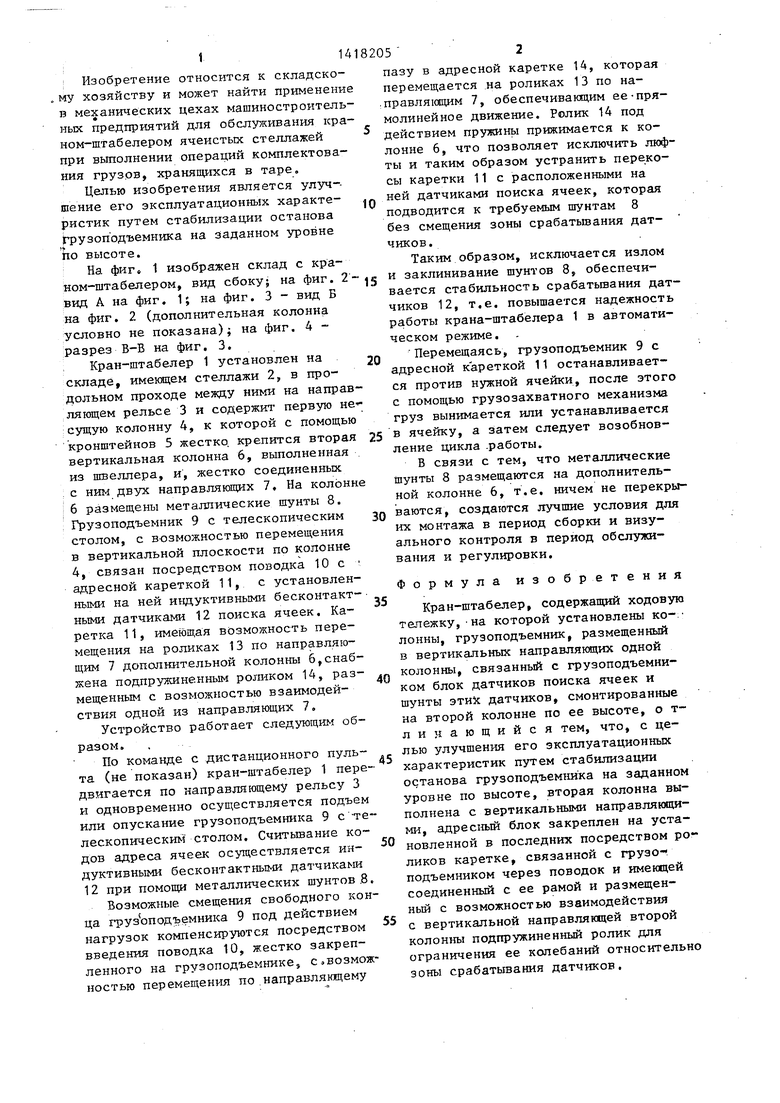
| название | год | авторы | номер документа |
|---|---|---|---|
| МОСТОВОЙ КРАН-ШТАБЕЛЕР | 1997 |
|
RU2191150C2 |
| Склад для хранения штучных грузов | 1982 |
|
SU1041435A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Устройство для адресования крана-штабелера складского стеллажа | 1984 |
|
SU1411223A1 |
| КРАН-ШТАБЕЛЕР,Ф011ДЗ.;:.о^йа| | 1973 |
|
SU390002A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Грузоподъемник крана-штабелера | 1977 |
|
SU678005A1 |
| Транспортно-накопительная система | 1989 |
|
SU1747352A1 |
| Кран-штабелер для двустороннего обслуживания многоярусных стеллажей | 1976 |
|
SU570533A1 |
| Кран-штабелер | 1980 |
|
SU893846A1 |

Изобретение относится к конструкциям кранов-штабелеров и может быть использовано в механических цехах машиностроительных предприятий дпя обслуживания ячеистых стеллажей. Цель изобретения - улучшение его эксплуатационных характеристик путем стабилизации останова грузоподъемника на заданном уровне по высоте.Кран- П табелер содержит и вторую колонны. Колонна 6 имеет размещенные по высоте металлические шунты 8 и адресную каретку 11, связанную посредством поводка 10 с грузоподъемником 9 и снабженную подпружиненным роликом 14, ограншишающим ее колебания относительно зоны срабатываш1Я датчиков 12. Возможные смещения свободного конца грузоподъемника 9 под действием нагрузок компенсируются посредством поводка 10, который перемещается по направляющему пазу в адресной каретке 11. Ролик 14 под действием пружины прижимается к направляющей 7 колонны 6, что позволяет исключить люфты и, таким образом, устранить перекосы каретки 11. 4 ил.
01/3.
Изобретение относится к складско- . му хозяйству и может найти применени п механических цехах машиностроительных предприятий для обслуживания кра ном-штабелером ячеистых стеллажей при выполнении операций комплектования грузов, хранящихся в таре.
Целью изобретения является улуч-- тение его эксплуатационных характеристик путем стабилизации останова грузоподъемника на заданном уровне iio высоте.
На фиг 1 изображен склад с кра- ном-штабелером, вид сбоку; на фиг. 2 вид А на фиг, 1; на фиг. 3 - вид Б на фиг. 2 (дополнительная колонна условно не показана); на фиг. 4 - разрез В-В на фиг. 3.
Кран-штабелер 1 установлен на складе, имекщем стеллажи 2, в продольном проходе между ними на направляющем рельсе 3 и содержит первую не сущую колонну 4, к которой с помощью кронштейнов 5 жестко, крепится вторая вертикальная колонна 6, выполненная из швеллера, и, жестко соединенных с ним двух направляющих 7, На колонн 6 размещены металлические шунты 8. Грузоподъемник 9 с телескопическим столом, с возможностью перемещения в вертикальной плоскости по колонне 4, связан посредством поводка 10 с адресной кареткой 11, с установленными на ней ивдуктивными бесконтактными датчиками 12 поиска ячеек. Каретка 11, имеющая возможность перемещения на роликах 13 по направляющим 7 дополнительной колонны б,снабжена подпружиненным роликом 14, раз- мещенньм с возможностью взаимодействия одной из направляющих 7,
Устройство работает следующиь образом.
По команде с дистанционного пульта (не показан) кран-штабелер 1 передвигается по направляющему рельсу 3 и одновременно осуществляется подъем или опускание грузоподъемника 9 с -те лескопическш столом. Считьшание кодов адреса ячеек осуществляется ин- дуктивными бесконтактными датчиками 12 при помощи металлических шунтов .8.
Возможные смещения свободного конца груз оподъемника 9 под действием нагрузок компенсируются посредством введения поводка 10, жестко закрепленного на грузоподъемнике, с.возможностью перемещения по .направлякщему
0
5
0
5
0
5
0
5
5
пазу в адресной каретке 14, которая перемещается на роликах 13 по на- :Правля1шщм 7, обеспечивающим ее-прямолинейное движение. Ролик 14 под действием пруткинь прижимается к колонне 6, что позволяет исключить люфты и таким образом устранить перекосы каретки 11с расположенными на ней датчиками поиска ячеек, которая подводится к требуемым шунтам 8 без смещения зоны срабатьтания дат- чиков.
Таким образом, исключается излом и заклинивание шунтов 8, обеспечивается стабильность срабатьшания датчиков 12, т.е. повышается надежность работы крана-штабелера 1 в автоматическом режиме.
Перемещаясь, грузоподъемник 9 с адресной кареткой 11 останавливается против нужной ячейки, после этого с помощью грузозахватного механизма груз вынимается или устанавливается в ячейку, а затем следует возобновление цикла -работы.
В связи с тем, что металлические шунты 8 размещаются на дополнительной колонне 6, т.е. ничем не перекрываются, создаются лучшие условия для их монтажа в период сборки и визуального контроля в период обслужи- вания и регулировки.
Формула изобретения
Кран-штабелер, содержащий ходовую тележку,-на которой установлены ко- лонны, грузоподъемник, размещенный в вертикальных направляющих одной колонны, связанный с грузоподъемником блок датчиков поиска ячеек и шунты этих датчиков, смонтированные на второй колонне по ее высоте, о т- линающийся тем, что, с целью улучшения его эксплуатационных характеристик путем стабилизации останова грузоподъемника на заданном уровне по высоте, вторая колонна выполнена с вертикальными направляющими, адрес1Л1й блок закреплен на установленной в последних посредством ро ликов каретке, связанной с грузе- подъемником через поводок и имеющей соединенный с ее рамой и размещенный с возможностью взаимодействия с вертикальной направляющей второй колонны подпружиненный ролик для ограничения ее колебаний относительно зоны срабатывания датчиков.
5 6
.
13
Фаг. 2
| Маликов О.В | |||
| Склады гибких автоматизированных производств | |||
| - Л.: Машиностроение, 1986, с | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
