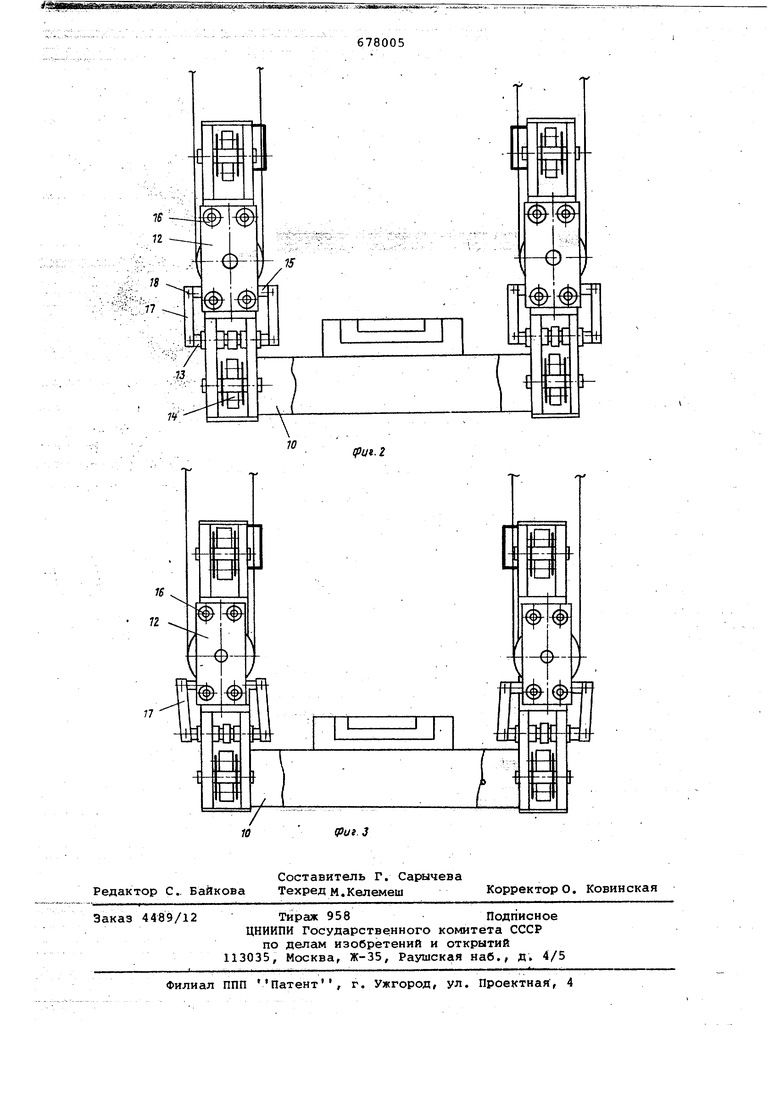
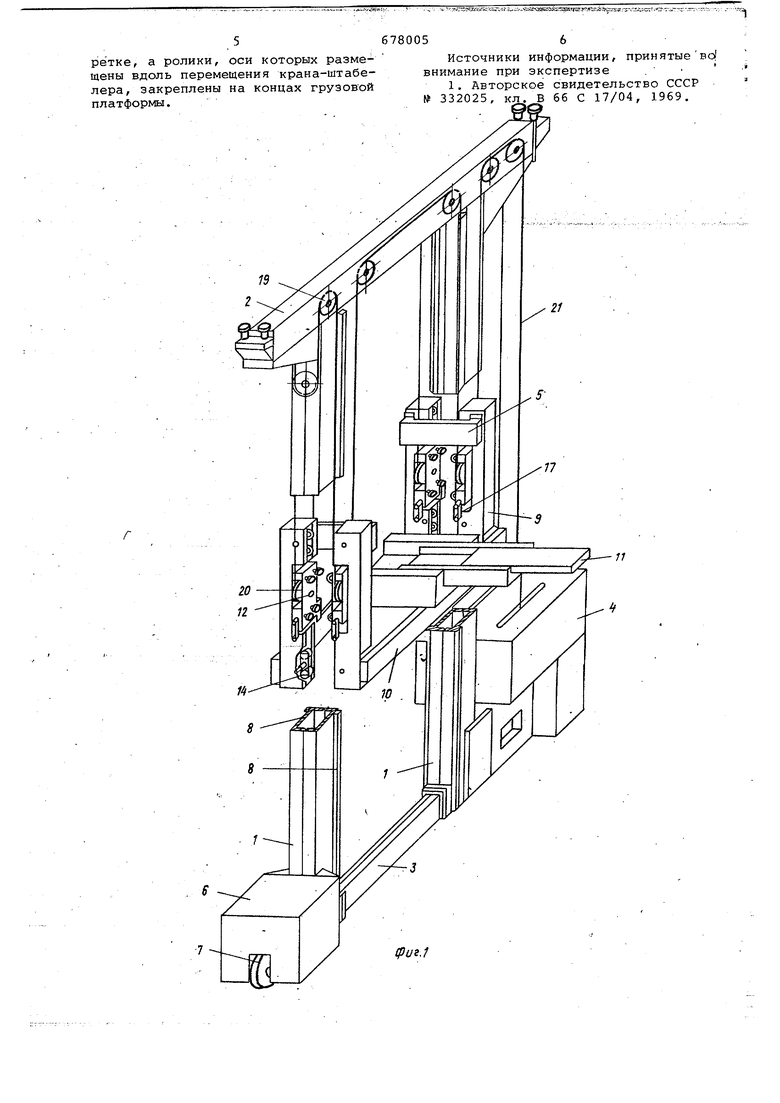
Изобретение относится к складскому хозяйству, в частности, к грузоподъемникам кранов-штабелеров. Известен грузоподъемник крана-шта белера, содержащий грузовую платформу с телескопическими захватами, шар нирно связанную через рычажную систему с подъемно-опускными каретками/ установленными в вертикальных направ ляющих крана-штабелера, охваченных опорными- роликами кареток, оси которых расположены вдоль и поперек направления перемещения крана-штабелера 1, Однако этот грузоподъемник недостаточно надежен,поскольку не позволя ет уменьшить динамические нагрузки н колонны крана-штабелера при останове и пуске последнего с одновременным подъемом или опусканием грузоподъемника, а акже надежно компенсировать погрешности монтажа колонн. Целью.изобретения является повыше ние надежности работы за счет уменьшения динамических нагрузок. Этодостигается , что в предла гаемом кране рычажная система выполнена в виде шарнирных параллелограммов с двумя горизонтальными связями в каждом, при этом одна горизонталь ная связь закреплена на каждой каретке, а другая - на платформе, причем ролики, оси которых размещены поперек направления перемещения кранаштабелера также закреплены на каждой .каретке, а ролики/ оси которых размещены вдоль перемещения крана-штабелера/ закреплены на концах грузовой платформы, На фиг. 1 показан общий вид описываемого крана-штабелера с грузоподъемником; на фиг. 2 - продольный разрез .грузоподъемника (колонны не по.казаны) ; на фиг. 3 - положение кареток с продольными направляющими роликами при выборе погрешностей монтажа колонн и направляющи с брусье.в. Кран-штабелер содержит колонны 1, которые в верхней части соединены траверсой 2, а в нижний - стяжкой 3. Механизм 4 подъема грузоподъемника 5 и механизм б передвижения крана-штабелера с входовыми колесами 7 расположены в нижней части kpaHa-штабелера, Колон45Ы 1 имеют направляющие брусья/ по которым перемещается грузоподъемник 5. Грузоподъемник 5 содержит корпус 9 с грузовой платформой 10, снабженной телескопическим захватом 11 и подъёмно-опускными каретками 12. Каждый конец грузовой платформы 10 снабжен консольными выступами 13 и роликами 14 , . оси которых {Расположены поперек перемещения крана-штабелера, ;;;,Л аж;дая каретка 12 также снабжёна .консольными выступами 15 и роликами 16, оси которых расположены вдоль . перемещения крана-штабелера, причем консольные выступы на платформе 10 и каретках 12 являются горизонтальны ми связями рычажной системы, образуе мой при соединении их вертикальной связью 17, снабженной осью 18, и выполненной в виде шарнирных параллелограммов . Грузоподъемник 5 связан с блоками 19, 20 итросом 21. Блоки 19 размещены в верхней части крана-штабелера Работа грузоподъемника осуществляется следующим образом. При подъеме и опускании грузоподъемника 5, ролики 14 и 16 охваты-: направляющие брусья 8 и обеспечивают направленное вертикальное перемещение грузопсэдъемника.; Придвижении штабелера вдоль стел „лажей (на чертежах не показаны) по проезду с одновременным подъемом- или опусканием грузовой платформы до заданной ячейки инерционные нагрузки в момент трогания с места или останова штабелера стремятся переместить корпус 9 грузовой платформы в продольной плоскости, т.е. по ходу движения штабелера. При этом связи 17 отклоняются от вертикального положения, поворачиваясь на осях 18, и вЬзвращаются в исходное положение после прекращения действия инерционных нагрузок. ,: ...;..,,.. .:: .., При этом связи 17, являясь звенья ми параллелограммов, одновременно с ;ШвО15Отом вокруг своих бсеЙ стрёйятся поднять корпус грузовой п/1атформы относительно корпусов карётОк, погло щая энергию движущихся по инерции масс грузовой платформы и уменьшая динамич,еские нагрузки на колонны Шта .., - --„.,,,.,,. -.----паь --- ---о-ч-д- --VT-- - jf- if -t -ff-i ftfiлй.й jtife ri g iSb i i F -v гяiv : rvj. белера. непараллельность колонн и погрешности монтажа направляющих брусьФВ также компенсируются шарнирными параллелограммами, благодаря ; Ш$ Ш:рёь 6с и зЖлйтгв1ннГё г1ру3овой платформы исключёйЫТ - -«---Это поясняется на фиг. 3, где изображено одно из положений кареток 12 с продольными направляющими роликами 16 и связей 17 при движении по искрйвленным направляющим брусбям ИЛИ непараллельно сй6йтй4 бваннь1М колоннам. В связи с тем, что для каж лого направляющего бруса предусмот Эёй Ътдел най йащэавЙ1РпШ;ая Kaipefjta с Продольными ролниами, погрешности взаимного расположения направляющих бЕ)ус1ьёв на одной KcinoHHe тйкжгёкомпенсируются ща рнирными параллело678005граммайи . подъеме и опускании грузовой платформы возможно неравное натяжение ветвей грузовых канатов, возникающее в результате трения в полиспастных и отклоняющих блоках, что может привести к отклонениям от гОрИзонта.льного положения грузовой платформы в продольном направлении. Свойство параллелограмма - сохранять Плоскопараллельное перемещение горизонтальных звеньев при угловых перемещениях вертикальных звеньев дает возможность также стабилизировать горизонтальное положение грузовой платформы в продольном направлении при возникакяцих неравных усилиях в ветвях грузойого каната. При выдвижении телескопического захвата для установки груза на стеллаж или съема груза со стеллажа, нагрузки в поперечной плоскости, возникающие при этом, воспринимаются поперечными направляющими роликами. Параллелограммные связи, на которых подвешены грузовая платформа и продольные направляющие ролики, не несут указанных нагрузок. Предлагаемая конструкция грузовой платфоркпа позволяет: снизить трудоемкость изготовления колонн штабелера за счет исклю гения механической обработки направляющих брусьев после их приварки к колоннам; снизить метал- . лоемкость колонн штабелера за счет уменьшения динамических.инерционных нагрузок от грузовой платформы при неустановившемся движении штабелера; снизить трудремк.ость монтажа колонн штабелера за счет расширения допуска На непаралле л.ьность. колонн и направЛянзщйх ёрусьев. Все это особенно важйо При изготовлении штабелеров высотой 154-30 м. Формула изобретения Грузоподъемник крана-штабелера, содержащий грузовую платформу с тёлескрпичдсди О захватами, шарнирно связанную через рычажную систему с подъб мно-опускными каретками, установленными в вертикальных направляющих кранатутабелера, охваченных опорныкш роликами кареток оси которых расположены вдоль и поперек направления перемещения крана-штабелера, отличающийся тем, что с целью повьниения надежности работы за счет уменьшения динамических наrpiysoK,рй ажная система выполнена в виде шарнирных параллелограммов с двумя горизонтальными в каждом, при этом одна горизонтальная закрепле.на на каждой каретке, а другая на платформе, причем ролики, оси которых размещены поперек направления перемещения кр на-штабелера, также закреплены на каждой ка5рётке, а ролики, оси которых размещены вдоль перемещения крана-штабелера, закреплены на концах грузовой платформы. 6780056 Источники информации, принятыево/ внимание при экспертизе 1. Авторское свидетельство СССР № 332025, кл. бб С 17/04, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стеллажный кран-штабелер | 1986 |
|
SU1402521A1 |
| Кран-штабелер | 1983 |
|
SU1164157A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Установка для приготовления бетонных и растворных смесей | 1991 |
|
SU1805051A1 |
| Кран-штабелер | 1990 |
|
SU1782874A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Склад для хранения штучных грузов | 1974 |
|
SU628038A1 |
| Кран-штабелер | 1985 |
|
SU1341119A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |