Изобретение относится к электротехнике, а именно к регулируемым электроприводам постоянного тока с упругой связью между электродвигателем и механизмом.
Цель изобретения - упрощение и повышение точности.
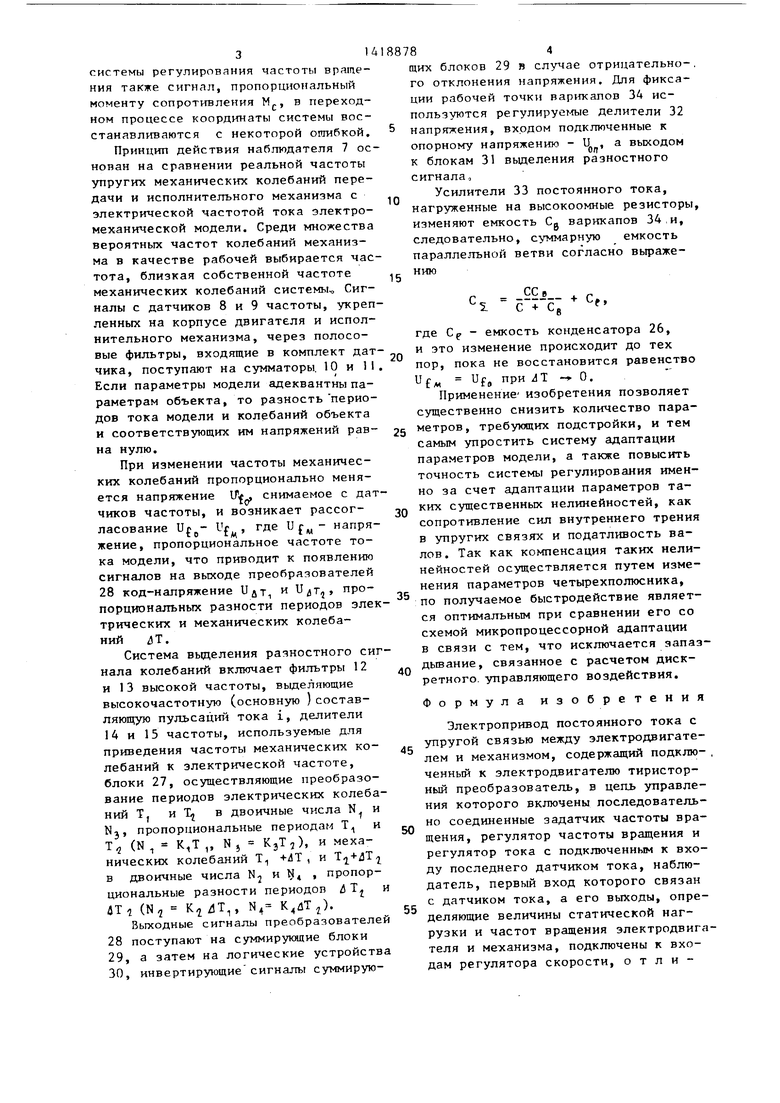
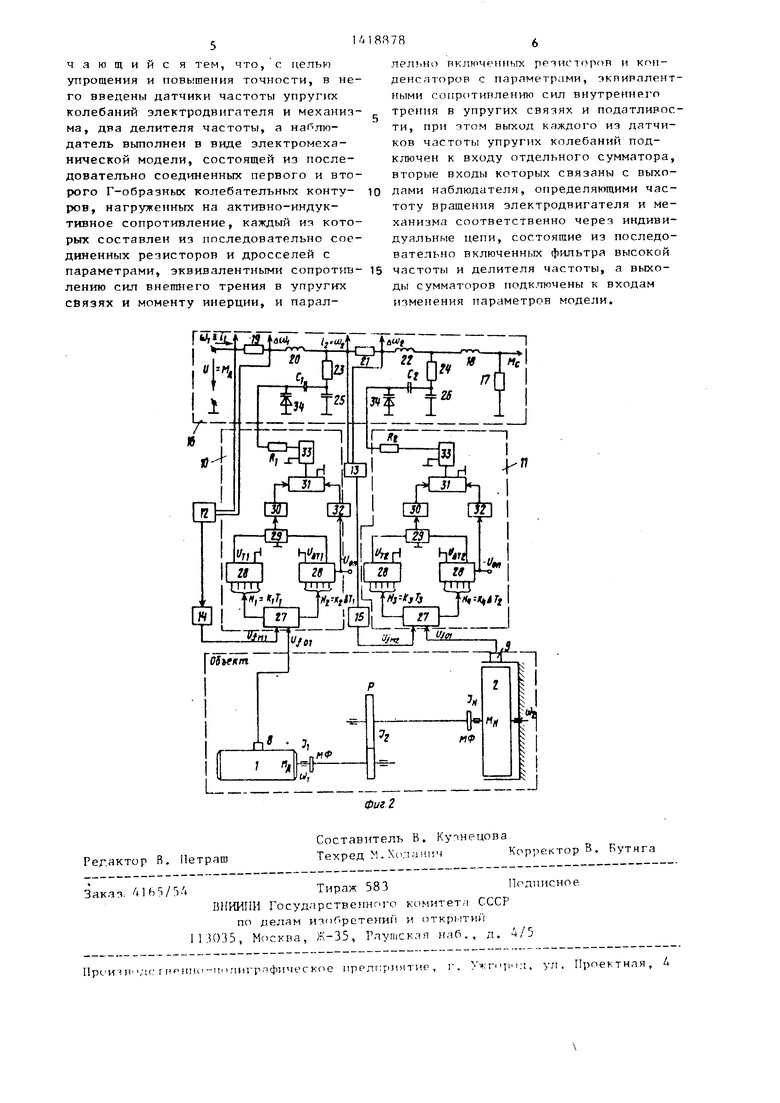
На фиг, 1 представлена функциональная схема электропривода; на фиг. 2 - электромеханическая модель упругих связей электропривода.
Электропривод постоянного тока с упругой связью между электродвигателем 1 и механизмом 2 содержит подключенный к электродвигателю 1 тирис торный преобразователь 3, в цепь управления которого, включены последовательно соединенные задатчик частоты вращения, регулятор 4 частоты вращения и регулятор 5 тока с подключенным к входу последнего датчиком 6 тока, наблюдатель 7, первый вход кот рого связан с датчиком 6 тока, а его выходы, определяющие величины статической нагрузки и частот вращения электродвигателя и механизма, подключены к входам регулятора 4 частоты вращения. Электропривод содержит также датчики 8 и 9 частоты упругих колебаний электродвигателя и механизма, сумматоры 10 и 11, фильтры 12 и
13высоких частот и делители 14 и 15 частоты (фиГо1, фильтр 12 и делитель
14частоты, а также фильтр 13 и делитель 15 частоты, показаны в виде одного блока).
Наблюдатель (фиг.2) выполнен в виде электромеханической модели 16, состоящей из последовательно соединенных первого и второго Г-образных колебательных контуров, нагруженных на активно-индуктивное сопротивление 17 и 18, каждый из которых составлен из последовательно соедииенных резисторов и дросселей с параметрами, эквивалентными сопротивлению сил внешнего трения в упругих связях и моменту инерции (первый контур образован резистором 19 и дросселем 20, второй - резистором 21 и дросселем 22) и параллельно включенных резисторов 23- и 24 и конденсаторов 25 и 26 с параметрами, эквивалентными сопротивлению.сил внутреннего трения в упру- их свячях и податливости. При этом рькоды датчиков 8 и 9 частоты упругих колеПанин подключены к входам сумматоров 10 и 11 соответстненно, вторые входы которых связаны с выходами наблюдателя 7, определяющими частоту вращения элек- - тродвигателя и механизма соответственно, через индивидуальные цепи, состоящие из последовательно включен- ных фильтров 12 и 13 высокой частоты и делителей 14 и 15 частоты, а выхо0 ды сумматоров подключены к входам изменения параметров модели.
Наблюдатель 7 (фиг,1) выполнен из двух частей ввиду того, что заданием для второй его части является вра5 щающий момент электродвигателя Мд, сигнал которого в электромеханической модели (фиг,2) представлен напряжением и, а частота вращения tj - током i.
0 Сумматоры 10 и 11 (фиг,2) выполняют, кроме функций суммирования сигналов, преобразование сигналов из
цифровой формы в аналоговую. Каждый сумматор состоит из блока 27, осу5 ществляющего преобразование периодов электрических и механических колебаний в двоичные числа, пропорциональные периодам этих колебаний, выходы которого соединены с первыми входами
0 преобразователей 28 код-напряжение, выходы которых подключены к входам суммирующего блока 29, Выход суммирующего блока 29 через логическое устройство 30, инвертирующее выход5 ные сигналы суммирующего блока 29 в случае отрицательного отклонения напряжения, соединен с первым входом блока 31 выделения разностного сигнала, второй вход которого герез регу0 лируемый делитель 32 напряжения соединен с вторым входом преобразователя 28 код-напряжение, а выход блока 31 вьщеления разностного сигнала через усилитель 33 постоянного тока
5 подключен к входу варикапа 34.
Электропривод работает следующим образом.
При малых значениях коэффициента соотношения масс для обеспечения плавного движения исполнительного органа в блок задания частоты вращения w системы регулирования частоты вращения вводится сигнал разности частот вращении Л ы, - (- j, что в некоторой слепени эквивалентно вве- ленито производной u .j . Яая точногс. восстан(1р:тения координат в установившемся режиме и тб.пн лятель 7 nnnniiT п блок чал.члия частогп ррлиенич )
0
5
314
системы регулирования частоты вращения также сигнал, пропорциональный моменту сопротивления М, в переходном процессе координаты системы восстанавливаются с некоторой ошибкой.
Принцип действия наблюдателя 7 основан на сравнении реальной частоты упругих механических колебаний передачи и исполнительного механизма с электрической частотой тока электромеханической модели. Среди множества вероятных частот колебаний механизма в качестве рабочей выбирается частота, близкая собственной частоте механических колебаний системы Сигналы с датчиков 8 и 9 частоты, укрепленных на корпусе двигателя и исполнительного механизма, через полосовые фильтры, входящие в комплект датчика, поступают на сумматоры. 10 и II. Если параметры модели адеквантны параметрам объекта, то разность периодов тока модели и колебаний объекта и соответствующих им напряжений равна нулю.
При изменении частоты механических колебаний пропорционально меняется напряжение Т снимаемое с датчиков частоты, и возникает рассогласование U - Uf , где Ufiu напряжение, пропорциональное частоте тока модели, что приводит к появлению сигналов на выходе преобразователей 28 код-налряжение идт, и , пропорциональных разности периодов электрических и механических колебаний йТ,
Система выделения разностного сигнала колебаний включает фильтры 12 и 13 высокой частоты, выделяющие высокочастотную (основную ) составляющую пульсаций тока i, делители 14 и 15 частоты, используемые для приведения частоты механических колебаний к электрической частоте, блоки 27, осуществляющие преобразование периодов электрических колебаний Т, и Tj в двоичные числа N и NJ, пропорциональные периодам Тд и Т,; (N К,Т ,, N , KjT,), и механических колебаний Т +4Т , и в двоичные числа N и N , пропорциональные разности периодов 4 Т и , К 41,, N4 ).
Выходные сигналы преобразователей 28 поступают на суммирующие блоки
29,а затем на логические устройства
30,инвертирующие сигналы суммирую84
щих блоков 29 в случае отрицательно-, го отклонения напряжения. Для фиксации рабочей точки варикапов 34 используются регулируемые делители 32 напряжения, входом подк.пюченные к опорному напряжению - U , а выходом к блокам 31 выделения разностного сигнала о
Усилители 33 постоянного тока, нагруженные на высокоомные резисторы, изменяют емкость С варикапов 34,и, следовательно, суммарную емкость параллельной ветви согласно вьфаже- нию
CCi
С + С,
+ Cf,
0
0
5
0
5
0
5
где Ср - емкость конденсатора 26, и это изменение происходит до тех пор, пока не восстановится равенство м Uf, при А1 - 0.
Применение изобретения позволяет существенно снизить количество пара- 5 метров, требующих подстройки, и тем самым упростить систему адаптации параметров модели, а также повысить точность системы регулирования именно за счет адаптации параметров таких существенных нелинейностей, как
сопротивление сил внутреннего трения в упругих связях и податливость валов. Так как компенсация таких нелинейностей осуществляется путем изменения параметров четьфехполюсника, по получаемое быстродействие является оптимальным при сравнении его со схемой микропроцессорной адаптации в связи с тем, что исключается запаз- дьшание, связанное с расчетом дискретного, управляющего воздействия.
Формула изобретения
Электропривод постоянного тока с упругой связью между электродвигателем и механизмом, содержащий подклю- , ченный к электродвигателю тиристор- ный преобразователь, в цепь управления которого включены последовательно соединенные задатчик частоты вращения, регулятор частоты вращения и регулятор тока с подключенным к входу последнего датчиком тока, наблюдатель, первый вход которого связан с датчиком тока, а его выходы, определяющие величины статической нагрузки и частот вращения электродвигателя и механизма, подключены к входам регулятора скорости, о т л и чающийс я тем, что, с целью упрощения и повышения точности, в не го введены датчики частоты упругго колебаний электродвигателя и механиз ма, два делителя частоты, а наблюдатель вьтолнен в виде электромеханической модели, состоящей из последовательно соединенных первого и вто роге Г-образных колебательных контуров, нагруженных на активно-индуктивное сопротивление, каждый ия кото рых составлен из последовательно сое диненных резисторов и дросселей с параметрами, эквивалентными сопротив лению сил внешнего трения в упругих связях и моменту инерции, и парал10
15
рключенных рртипоров и конденсаторов с параметрами, экпивалент- ными сопротиилепию сил внутреннего трения в упругих связях и податливости, при этом выход каждого из датчиков частоты упругих колебаний подключен к входу отдельного сумматора, вторые входы которых связаны с выходами наблюдателя, определяющими частоту вращения электродвигателя и механизма соответственно через индивидуальные цепи, состоящие из последовательно включенных фильтра высокой частоты и делителя частоты, а вьсхо- ды сумматоров подключены к входам изменения параметров модели.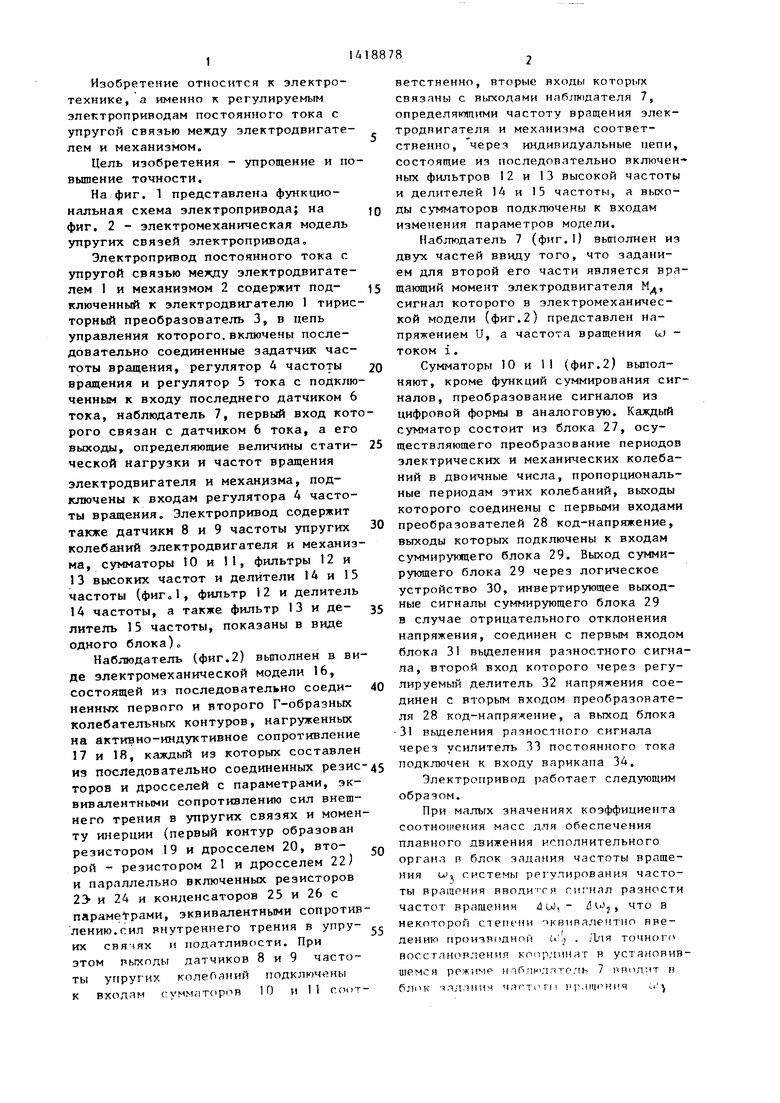
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1983 |
|
SU1128361A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Частотно-регулируемый асинхронный электропривод | 1984 |
|
SU1184064A1 |
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
| Электропривод | 1978 |
|
SU790090A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями в текстильной промьшзленности. Целью изобретения является упрощение и повышение точности. Устройство содержит датчики 8, 9 частоты упругих колебаний электродвигателя и механизма, выходы которых подключены к входам сумматоров 10, 11. Наблюдатель выполнен в виде электромеханической модели, состоящей из последовательно соединенных первого и второго Г-об- разных колебательных контуров, нагруженных на активно-индуктивное сопротивление. Адаптация параметров упругости модели осуществляется с помощью дискретной системы обработки информации разности частот механических и электрических колебаний. 2 ил. с « (Л СХ) 00 оо
| MapГалин Ш.Мо Дифферснциальньш электропривод | |||
| -М.: Энергия, 1975, с | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Башарин А.В„ и др | |||
| Управление электроприводами, -Л„: Энергоиздат, 1982, с | |||
| Соломорезка | 1918 |
|
SU157A1 |
