00
00
00
Изобретение относится к управлению э.шктрическими машинами и может быть использовано в замкнутом дискретном электроприводе.
Цель изобретения - упрощение электропривода путем устранения датчика положения ротора.
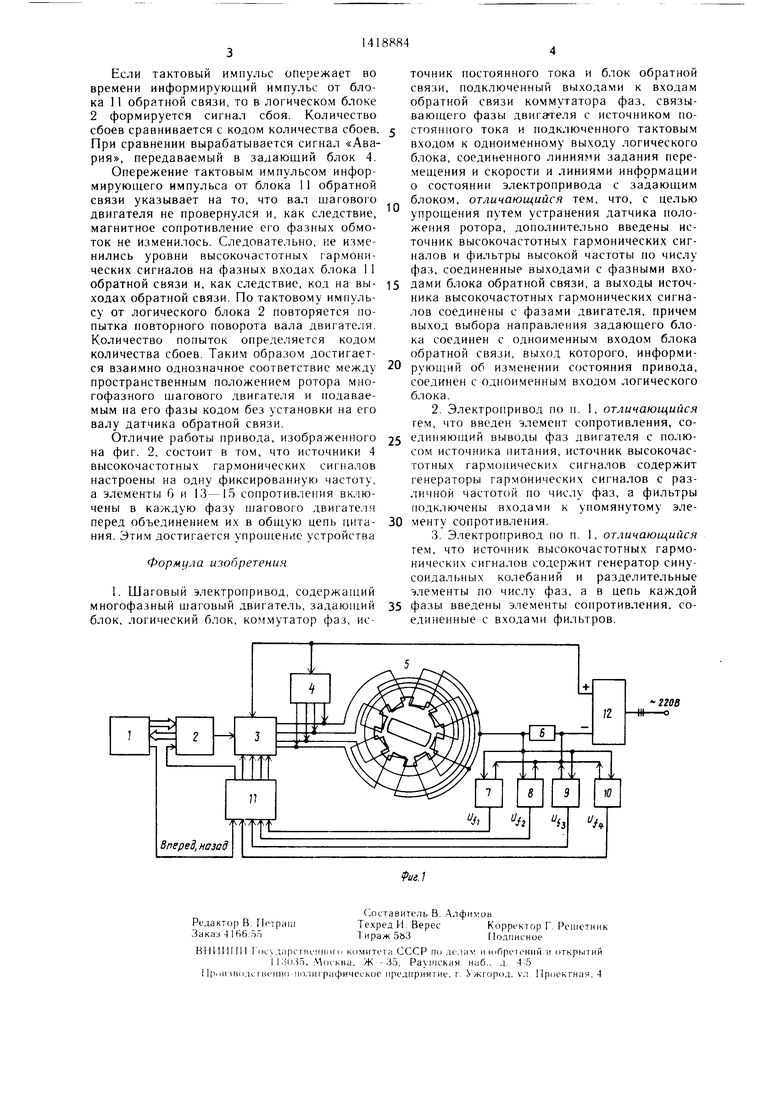
На фиг. 1 приведена функциональная схема электропривода применительно к че- тыре.хфазному др игателк) с общим датчиком тока; на фиг. 2 то же, с датчиками тока фаз.
Шаг овый электропривод (фиг. 1) содержит задающий блок 1, лошческий блок 2, коммутатор 3 фаз, источник 4 высокочастот- ны.ч гармонически.х сигналов, многофазный шаговый двигатель 5, элемент 6 сопротивления, фильтры 7 10 высокой частоты, блок 11 обратной связи,источник 12 постоянного тока.
Задаюп1ий блок 1 соединен выходом выбора направления вращения ротора niaro- вого двигателя с блоком 1 I обратной связи, а линиями задания перемещения, скорости и информации о состоянии inaroBoro электропривода с логически.м блоком 2, соединенным входом с выходом блока 1 1 обратной связи, информирующим об изменении состояния привода, а выходом с тактовым входом ком.мутатора 3 фаз, к входам обратной связи KOTOpoio подк.чючены выходы блока 1 1 обратной связи и источник 12 постоянного тока,а к выходам - источник 4 высоко- (л ных гармонически.х сигналов и фазные обмогки iiiar()B(j о двигателя о, в общую цепь питания Koropoio включено активное и пи peaK iHBHoe сопротивление G, к выводам которого 11одк, 1ючены фильтры 7 10 высокой частоты, соединенные выходами с фазными входами б.юка 1 1 обратной связи. Причем источник 1 высокочаст(зтных гар.монических с)1гналов подключен входо.м к полюсу источника 12 пита1 ия.
На фнг. 2 фи,1ьтры 7 К) высокой частоты соединены соответственно с выходами э. 1ементов 6 и 13 15 сопротивлений, включенных в фазн1)1е обмотки niaroBoro дви1-а- те;1я Г1е;)ед подсоединением их к iio.qRicy ис точника 12 питания.
Шаговый элек р()П)ивол работает c. ie- дующим обрачом.
По сигна,:|у «Готовность, передавае.чому по ;1ИН11И информации о состоянии элект- ропр.ивода, . .идающего блока 1 по .чиник ; а;;анин пегч мещения и скорости на входные регистры .югического б.гюка 2 передается информация, с(Х 1.ержа1цая код yr. ia поворота вала niaroBO 4 дви1ателя, код частоты отработки угла, код ко.пичества сбоев при его ограб()гке, код сброса и контрольный ра )ряд. 111;. 1учси11ая ин(})ормапия подвергается в логическом блоке 2 свертке и проверке с контрольным разрядом. При положите.пь- ном результате нроверки вырабатываются гактовые имнхмьсы, при отрицательном -
сигнал «Ошибка передачи, который по ли НИИ информации о состоянии электропривода передается на вход задающего блока 1. После окончания приемки входных сигиалов на входе задающего блока 1 снимается сигнал «Готовность, а на вход коммутатора 3 фаз начинают поступать тактовые импульсы. Одновремеино на входы обратной связи коммутатора 3 фаз от блока 11 обратной связи подается код, в соответствии с которым по тактовому импульсу, поступающему от логического блока 2, коммутируются фазы шагового двигателя 5, Вал двигателя поворачивается в положение, соответствующее максимальной проводимости магнитиой цепи шагового двигателя. Следовательно, индуктивность фазы шагового двигателя 5, по которой в данный момент протекает рабочий ток, является по отношению к другим фазам наибольшей.
Одновременно с включением питания электропривода источник 4 высокочастотных гармонических сигналов начинает генерировать в фазные обмотки двигателя фиксированные по частоте и амплитуде высокочастотные гармонические сигналы. Протекая по фазным обмоткам двигателя, эти сигналы попадают в общую цепь питания двигателя, вызывая совместно с рабочим током от источника 12 питания падение напряжения на элементе 6 сопротивления. Это падение
подается на входы фильтров 7-10 высокой частоты, в которых выделяются соответствующие фиксированные по частоте гармонические сигналы. Так как амплитудное значение выделенных сигналов определяется сопротивлением магнитной цепи статор-
ротор двигателя 5, то на фазные входы блока 11 обратной связи подаются сигналы, уровень которых однозначно определяет пространственное положение ротора многофазного шагового двигателя 5. В блоке 11 обратной связи по этим сигналам и сигналу
выбора направления, поступаеющему от задающего блока 1 на входы обратной связи коммутатора 3 фаз, вырабатывается код, необходимый для поворота вала шагового двигателя в требуемом направлении.
Изменение кода на выходе блока 11 обратной связи вызывает выработку сигнала, подаваемого на информирующий вход логического блока 2. В последнем количество отработанных шагов сравнивается с кодом угла поворота, переданным по линии информации от задающего блока 1. При сравнении шагов электропривод устанавливает на входе задающего блока 1 сигнал «Готовность, при этом все входные регистры логического блока 2 очищаются. Если сравнение не произошло, то по следующему опорному тактовому импульсу от логического блока 2 осуществляется поворот вала двигателя.Л в следующие положения (повторяется рабочий цикл электропривода).
Если тактовый импульс опережает во времени информирующий импульс от блока 11 обратной связи, то в логическом блоке 2 формируется сигнал сбоя. Количество сбоев сравнивается с кодом количества сбоев. При сравнении вырабатывается сигнал «Авария, передаваемый в задающий блок 4.
Опережение тактовым импульсом информирующего импульса от блока 11 обратной связи указывает на то, что вал щагового двигателя не провернулся и, как следствие, магнитное сопротивление его фазных обмоток не изменилось. Следовательно, не изменились уровни высокочастотных гармонических сигналов на фазных входах блока 11 обратной связи и, как следствие, код на выходах обратной связи. По тактовому импульсу от логического блока 2 повторяется попытка повторного поворота вала двигате.чя. Количество попыток определяется кодом количества сбоев. Таким образом достигается взаимно однозначное соответствие между пространственным положением ротора многофазного шагового двигателя и подаваемым на его фазы кодом без установки на его валу датчика обратной связи.
Отличие работы привода, изображенного на фиг. 2, состоит в том, что источники 4 высокочастотных гармонических сигналов настроены на одну фиксированную частоту, а элементы 6 и 13-15 сопротивления включены в каждую фазу inaroBoro двигателя перед объединением их в общую цепь питания. Этим достигается упропгенис устройства
Формула изобретения
1. Шаговый электропривод, содержащий многофазный щаговый двигатель, задаюн1ий блок, логический блок, коммутатор фаз, ис0
точник постоянного тока и блок обратной связи, подключенный выходами к входам обратной связи коммутатора фаз, связывающего фазы двигателя с источником постоянного тока и подключенного тактовым входом к одноименно.му выходу логического блока, соединенного линиями задания перемещения и скорости и линиями информации о состоянии электропривода с задающим блоком, отличающийся тем, что, с целью упрощения путем устранения датчика положения ротора, дополнительно введены источник высокочастотных гармонических сигналов и фильтры высокой частоты по числу фаз, соединенные выходами с фазными вхо5 дами блока обратной связи, а выходы источника высокочастотных гар.монических сигналов соединены с фазами двигателя, причем выход выбора направления задающего блока соединен с одноименным входом блока обратной связи, выход которого, информи0 рующий об изменении состояния привода, соединен с одноименным входом логического блока.
2.Электропривод по п. 1, отличающийся тем, что введен элемент сопротивления, со5 единиющий выводы фаз двигателя с полюсом источника питания, источник высокочастотных гар.монических сигналов содержит генераторы гармонических сигналов с различной частотой по числу фаз, а фильтры подключены входами к упомянутому эле0 менту сопротивления.
3.Электропривод по п. 1, отличающийся тем, что источник высокочастотных гармонических сигналов содержит генератор синусоидальных колебаний и разделительные элементы по числу фаз, а в цепь каждой
5 фазы введены элементы сопротивления, соединенные с входами фильтров.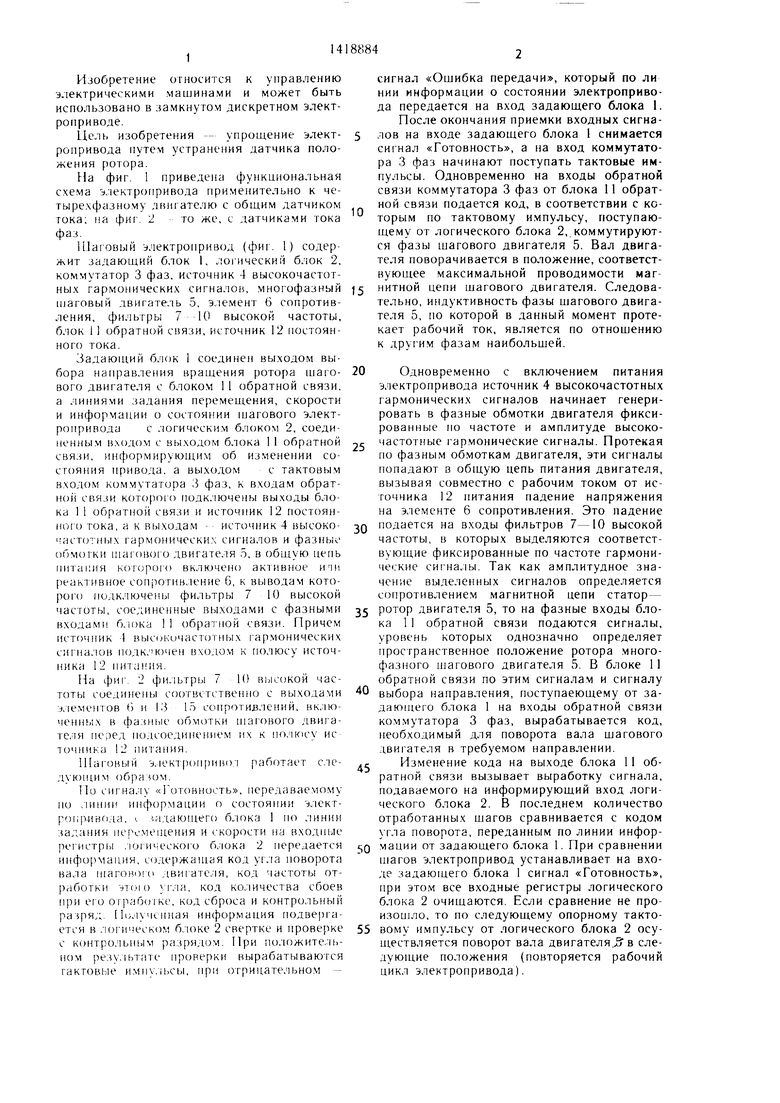
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехфазный преобразователь частоты с непосредственной связью | 1988 |
|
SU1617573A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Устройство для программного управления шаговым двигателем | 1989 |
|
SU1675850A1 |
| Устройство для обнаружения отказов в шаговом электроприводе | 1985 |
|
SU1319227A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2719604C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| Устройство для обнаружения отказов в шаговом электроприводе | 1988 |
|
SU1511843A1 |
| Вентильный электропривод | 1983 |
|
SU1270858A1 |
Изобретение относится к электротехнике и может быть использовано в замкнутом дискретном электроприводе. Цель изобретения состоит в упрощении устройства путем устранения датчика положения ротора. Изобретение позволяет определить пространственное положение вращаюш,егося электромагнитного поля и соответствующее ему положение вала шагового двигателя (ШД) 5 путем введения в фазные обмотки ШД фиксированных по частоте и амплитуде высокочастотных колебаний, выделения их из общей цепи питания и определения наимень- щего амплитудного значения, пропорционального максимальной магнитной проводимости фазы. В первом варианте устройства высокочастотные колебания подаются от источника 4 и имеют одинаковую амплитуду, но различную частоту. Протекая по обмоткам ШД, они вызывают на сопротивлении 6, включенном в общую цепь питания ШД 5, падение напряжения. Это напряжение пропорционально магнитной проводимости фаз и подается на входы разделительных фильтров 7-10. После выделения соответствующей частоты напряжения подаются на входы блока 11, в котором преобразуются в код, подаваемый на установочные входы коммутатора фаз 3. Во втором варианте устройства источник высокочастотных сигналов и разделительные фильтры 7 - 10 настроены на одну частоту, а сопротивления 6, 13, 14 и 15 включены в цепи обмоток перед объединением их в общую цепь питания 2,3.п. ф-лы, 2 ил. с (Л
2208
| Устройство для управления электромагнитным двигателем | 1984 |
|
SU1252905A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ фазирования вращающегося вала электродвигателя | 1973 |
|
SU738079A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
