со
00
00
ОР
«Риа.г
Изобретение относится к маш1но- строению и может быть использовано при перегрузке грузов с различной конфигурацией поверхности.
Целью изобретения является расширение технологических возможностей устройства
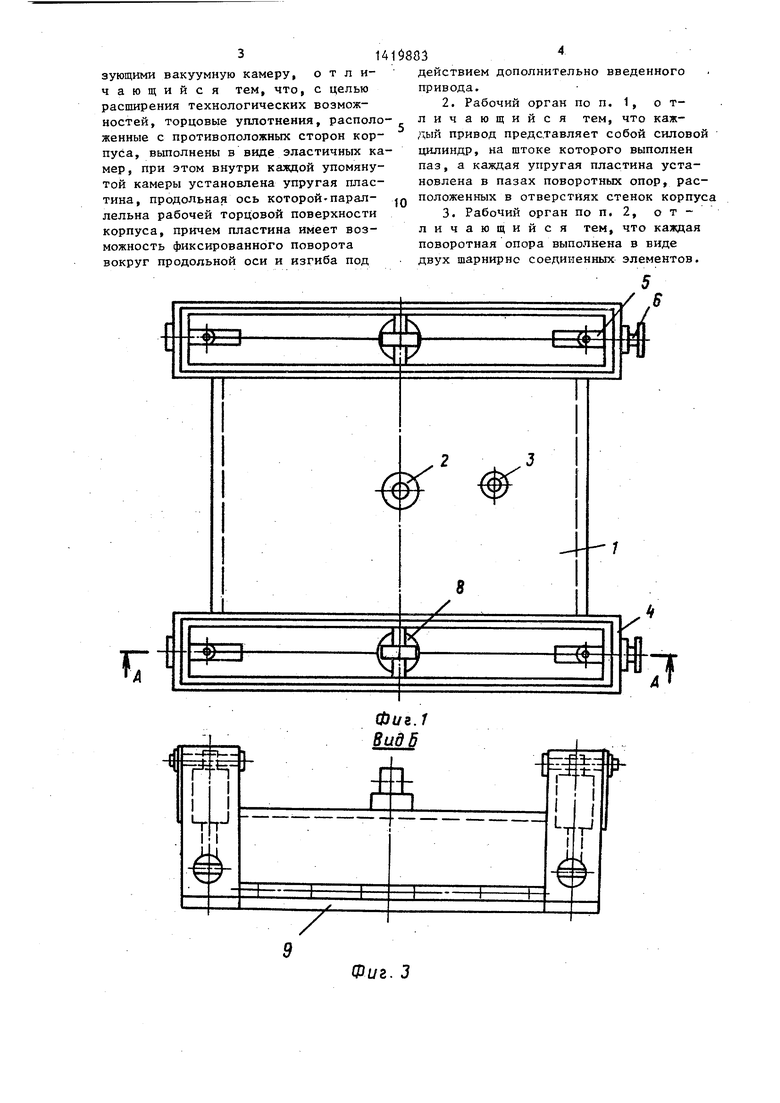
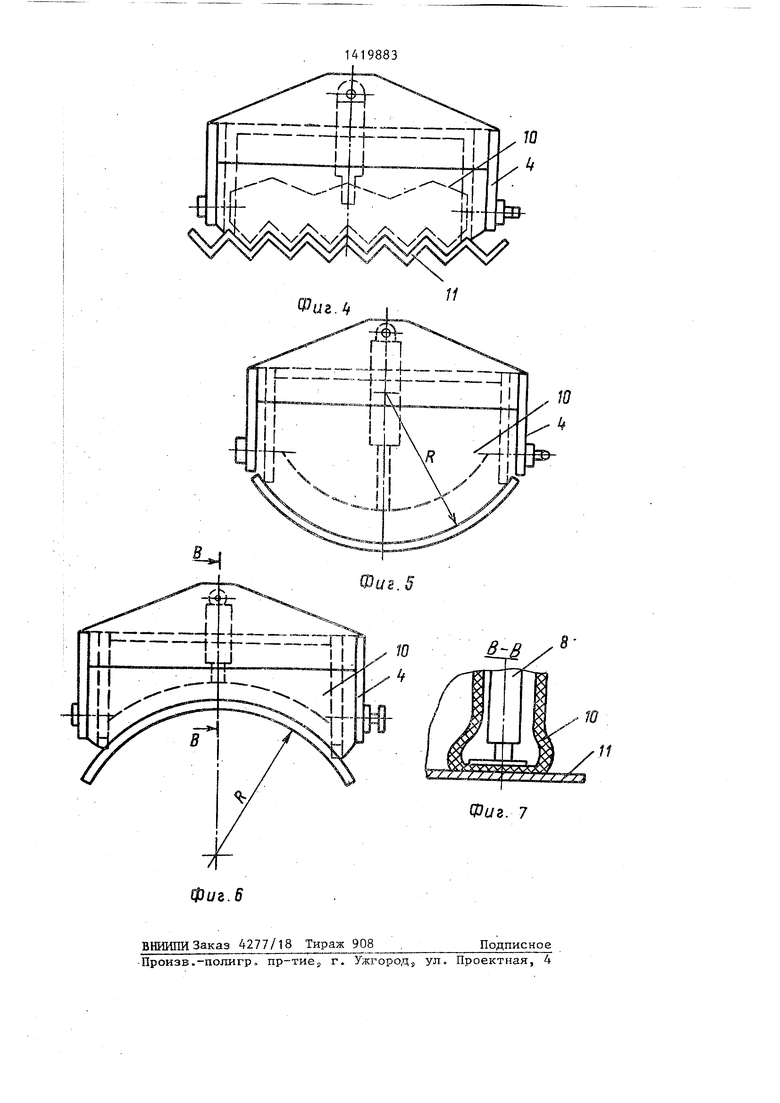
На фиг„ 1 изображен рабочий орган манипулятора вид сверху; на фиг. 2- разрез А-А. на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 рабочий орган при взаимодействии с грузом с волнистой поверхностью на фиг, 5- то же,с выпуклой цилиндрической поверхностью j на фиг, 6 - то же, с вогнутой цилиндрической поверхностью на фиг. 7 - разрез по Б-В на фиг. 6 (повернуто).
I
Рабочий орган содержит корпус 1
в виде П-образной пластины, на которой закреплен узел 2 крепления рабочего органа к поворотной головке манипулятора. В корпусе 1 выполнено отверстие 3 предназначенное для штуцера подключения к вакуумпроводу. На торцовьк участках пластины закреплены коробчатые держатели 4, являющиеся частью корпуса 1. Боковые стенки держателей 4 выполнены со сквозными отверстиями в которых установлены поворотные опоры 5; состоящие из двух шарнирно соединенных элементовэ в одном из которых выполнен паз. Наружные части опор 5 снабжены рукоятками 6. Внутри каждого коробчатого держателя расположена упругая пластина 7, две кромки которой имеют конфигурацию, соответствующую форме поверхности груза, подлежащего захвату, и силовые цилиндры 8 со штоками. Пластины 7 установлены с возможность перемещения в пазах опор 5 и могут быть сменными Штоки силовых цилиндров выполнены с пазами, обеспечивающими возможность ввода в них центральных участков пластин 7. Уплотнение рабочего органа содержит уплот- нительные элементы 9 преимущественно трубчатого сечения и уплотнитель- ные элементы 10, ,ый из которых выполнен, напримерJ из листа эластичного материала, закрепленного на обеих продольных стезках соответствующего держателя 4,, образуя эластичную камеру. Высота эластичных стенок элементов 10 уплотнения превьша:ет высоту элементов 9,, что необходимо для обеспечения возможности требуемого
прогиба элементов 10 вовнутрь держателя 4.
Рабочий орган работает следующим образом.
При необходимости захвата груза 11 штоки цилиндров 8 втягиваются и в держатели 4 рабочего органа вводятся пластины 7, обращенные к грузу продольные кромки которых имеют конфигурацию, соответствующую форме поверхности груза 11. После ввода пластин 7 в пазы опор 5 штоки выдвигаются на длину, обеспечивающую возможность их сцепления с пластинами 7. Затем рабочий орган накладывают на груз 11, ориентируя его таким образом , что элементы 10 уплотнения располагаются поперек криволинейной поверхности груза При этом пластины 7 перемещаются к поверхности груза 11 и деформируют элементы 10 уплотнения, заставляя их копировать форму поверхности груза и о.беспечивая тем самым герметизацию контактной поверхности уплотнения. Продольные элементы 9 уплотнения обеспечивают надежную герметизацию контактной площади за счет их трубчатой формы. При необходимости захвата и транспортирования груза с цилиндрической поверхностью (вогнутой или выпуклой) при втянутых штоках пластины 7 разворачивают на 90 с помощью рукояток 6, располагая их горизонтально. Последующее выдвижение штоков приводит к выгибу пластин 7, обеспечивает соответствующее растягивание элементов 10 уплотнения и возможность захвата грузов с вогнутой поверхностью. При захвате грузов с цилиндрической выпуклой поверхностью штоки втягивают. Деформация элементов 10 уплотнения в этом случае осуществляется за счет веса самого рабочего органа, а концы жтоков служат ограничителями прогиба пластин 7.
По завершении операции наложения . рабочего органа на груз его вакуумную камеру соединяют с источником вакуума. Захваченный груз поднимают стрелой манипулятора и транспортируют в требуемое место.
Формула изобретения
1. Рабочий орган манипулятора, содержащий корпус с злементами уплотнения, расположенными на торцовой рабочей поверхности корпуса и обрат:
i
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ПОЛЫХ ОРГАНОВ "ТРАЛ" (ВАРИАНТЫ) | 1998 |
|
RU2145488C1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| Манипулятор | 1984 |
|
SU1333567A1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2011518C1 |
| Инструмент для демонтажа и установки сальников и демонтажа опорного подшипника первичного вала автоматической коробки передач | 2023 |
|
RU2824680C1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
Изобретение относится к машиностроению и может быть использовано при транспортировке грузов с различной конфигурацией поверхности. Целью изобретения является расширение технологических возможностей. Для этого элементы 10 уплотнения корпуса выполнены в виде эластичных камер, в которых расположены упругие пластины 7, установленные в пазах поворотных опор и имеющие возможность фиксированного поворота. Силовой цилиндр 8 предназначен для изгиба пластигш 7 при захвате грузов с цилиндрической поверхностью, а также для фиксации пластин в нужном положении. При захвате груза пластина устанавливается таким образом, чтобы ее кромки или плоскость повторяли конфигурацию поверхности груза. Уплотнение 10 прижимается грузом к пластине 7, и вакуумная камера корпуса подключается к вакуумной системе. 2 э.п. ф-лы, 7 ил. i (О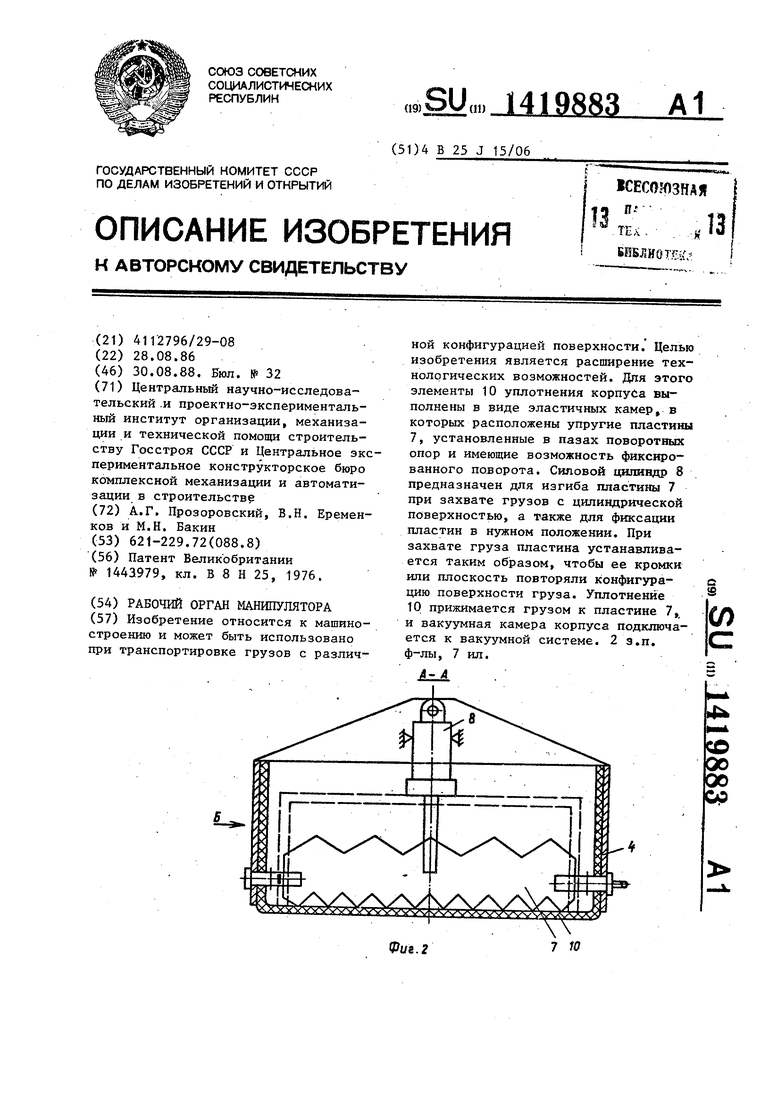
Фиг.1
Фиг. 3
Шг
Фиг. 7
| Устройство для контроля и сортировки магнитов | 1987 |
|
SU1443979A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
