Ош:Аг С г 1Ж:
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пресс-гранулятором | 1984 |
|
SU1194690A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Устройство для весового дозирования сыпучих материалов | 1982 |
|
SU1076766A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Устройство стабилизации угла наклона рабочего органа землеройно-планировочной машины | 1987 |
|
SU1520199A1 |
| Устройство для регулирования уровня воды в канале | 1986 |
|
SU1348788A1 |
| УСТРОЙСТВО для ПРЕДОХРАНЕНИЯ МЕТАЛЛОКОНСТРУКЦИИ | 1973 |
|
SU379745A1 |
Изобретение относится к предохранительным устр-вам, узлам сигнализации и управления конвейерами дро- бильно-сортировочных и роторных комплексов. Цель изобретения - повьшение надежности конвейера за счет снижения воздействия на опорные конструкции крупных кусков (КК). Для этого устр-во снабжено частотньм фильтром 8, блоком I1 вьщеления максимальной нагрузки, дифференциатором 14, ин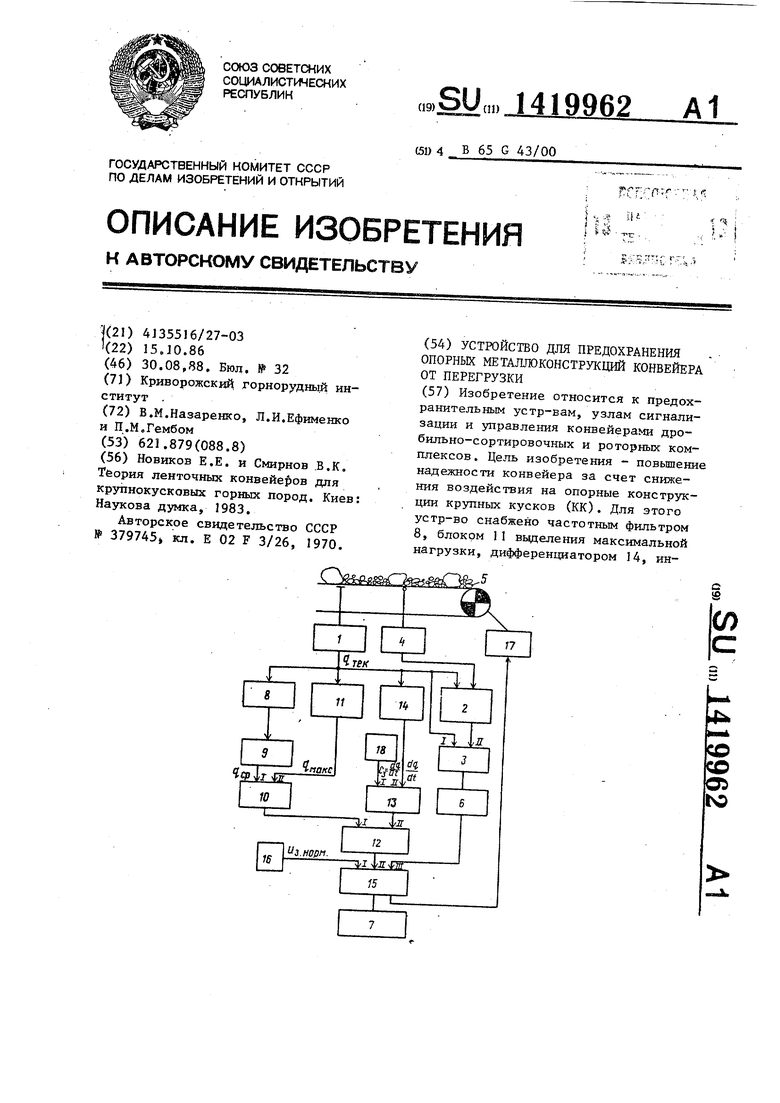
тегратором 9, компараторами 10 и 13, элементом И 12, сумматором (С) 15, блоком 17 управления скоростью конвейера 5, задатчиками дифференциальной составляющей 18 и нормальной скорости (НС) транспортирования 16. На входы фильтра 8, блока 11, дифференциатора 14, интегратора 3 и узла 2 эапаздьшания подается сигнал с выхода датчика 1 погонной нагрузки. На второй вход узла 2 запаздывания поступает сигнал с выхода датчика 4 скорости движения ленты конвейера 5. На отрицатёльньй вход С 15 поступает сигнал с порогового элемента 6, под1
Изобретение относится к предохранительным устройствам, узлам сигнализации и управления конвейерами дро- бильно-сортировочных и роторных комплексов.
Цель изобретения - повышение надежности конвейера за счет снижения воздействия на опорные конструкции крупных кусков.
На чертеже изображена схема устройства.
Устройство, включает датчик 1 погонной нагрузки,подключенный непосредственно и через узел 2 запаздывания к интегратору 3, датчик 4 скорости дви жения ленты конвейера 5, пороговый элемент 6 и индикатор 7. К выходу датчика 1 погонной нагрузки последовательно подключены частотный фильтр 8, второй интегратор 9 и компаратор 10, второй вход которого соединен с блоком 11 выделения максимальной нагрузки, а выход - с первым входом элемента И 12, на второй вход которого через второй вход второго компаратора 13 подключен дифференциатор 14. Выход элемента И подключен к второму входу сумматора 15, третий вход которого соединен с пороговым элементом 6, первый - с задатчиком 16 нормальной скорости транспортирования, а выход соединен с блоком 17 уп авления скоростью конвейера. К первому входу второго компаратора 13 подключен задатчик 16 дифференциальной составляющей.
19962
ключенного к выходу интегратора 3 и несущего информацию о превышении на-, грузки на заданном участке. На положительный вход С 15, компенсирующий отрицательный сигнал, поступает информация с элемента И 12 о наличии КК. Сюда также поступает задание НС транспортирования. При наличии КК отрицательный сигнал компенсируется и в блок 17 пойдет сигнал на уменьшение скорости транспортирования.При отсутствии сигналов о КК и превышении массы происходит транспортирование на заданной НС. Сигнал с сумматора 15 поступает на индикатор 7, 1 ил.
Устройство работает следующим образом.
При работе конвейера 5 выходной сигнал с датчика 1 погонной нагрузки поступает в узел 2 запаздьюания, где происходит запаздывание сигнала пропорционально скорости движения горной массы на ленте конвейера. Сигналы с датчика 1 и узла 2 запаздывания поступают на входы интегратора 3, соответственно пропорциональные производительности конвейера 5 на входе и выходе контролируемого участка.
С выхода интегратора 3 поступает на пороговый элемент 6 сигнал. При превышении заданного напряжения порога срабатьшания порогового элемента 6 последний вьщает сигнал на сумматор 15.
Сигнал с датчика 1 нагрузки через частотный фильтр 8, отсекающий высокочастотную составляющую и настроенный на-частоты колебания погонной нагрузки, поступает на интегратор 9, который-осуществляет интегрирование сигнала, пропорционального линейной нагрузке конвейера q(t). Сигнал на выходе интегратора 9 пропорционален средней линейной нагрузке
icp
j q(t)dt.
Напряжение сигнала на выходе интегратора 9 определяется зависимостью
35
и
вых
} qCOdt - ;
где R, С - параметры интегратора;
t - текущее значение времени;
и - - -входной сигнал интеграто- &х
ра, пропорциональный текущему значению линейной нагрузки.
Сигнал с датчика 1 нагрузки поступает на блок 11 вьщеления максимальной нагрузки, который представ- ляет собой пиковый детектор, в котором при возрастании входного напряжения и5, соответственно воздействию груза на датчик 1 погонной нагрузки оно отслеживается выходным напряже- кием схемы, а при уменьшении Ug амплитудный детектор перехедит в режим хранения и запоминает предьщущее максимальное значение входного напряжения, которое соответствует макси- мальному значению воздействия груза Ч макс датчик 1. Причем сигнал с блока 11 для дальнейшей работы передается только в том случае, когда он превышает заданное значение
т-е. Чтек Чмакс Ч. макс- Сигнал с выхода интегратора 9, характеризующий среднюю линейную нагрузку на ленте, и сигнал с блока 11 вьще-, ления максимальной нагрузки подаются на компаратор 10. При работе компаратора 10 возникают два условиягд ддо.
Ч .МО КС
q
ср
что соответствует наличию превьшения нагрузки над заданной, и отУстройство для предохранения опорных металлоконструкций конвейера от перегрузки, включающее датчик погонной нагрузки и датчик скорости движения ленты конвейера, соединенные с узлом запаздывания, а также последовательно соединенные интегратор, пороговый элемент и индикатор, о т- личающееся тем f что, с
сутствие сигнала-с блока П. Компара- з повышения надежности конвейера
тор 10 срабатьшает при первом условии и посьшает 1 на элемент И 12.
Дифференциатор 14 выделяет из сигнала линейной нагрузки с датчика 1 нагрузки дифференциальную составляющую воздействия кр-упных кусков на опорные элементы dq/dt и подает сигнал на второй компаратор 13, где названный сигнал сравнивается с заданным С dq /dt, соответствующим динамической составляющей от допустимого куска. При выполнении условия
dS da
dt dt,
компаратор 13 срабатьшает и формирует ,1 на элемент И 12. Этот сигнал означает, что в потоке груза пошел кусок, превышающий допустимую величину.
Сигналы с логического элемента И 12, порогового элемента 6 и задание нормальной скорости транспортирования и.норм поступают в сумматор
45
за счет снижения воздействия на опор- ные конструкции крупных кусков, оно дополнительно снабжено частотным фильтром, блоком вьзделения максималь- .„ ной нагрузки, дифференциатором, дополнительным интегратором, двумя компараторами, элементом И, сумматором, блоком управления скоростью конвейера, задатчиком дифференциальной составляющей и задатчиком нормальной скорости транспортирования, причем выход датчика погонной нагрузки соединен с входами частотного фильтра, блока выделения максимальной нагрузки, дифференциатора, первыми входами узла запаздьшания и интегратора, выход датчика скорости движения ленты конвейера соединен с вторым входом узла запаздьшания, выход которого соединен с вторым входом интеграт- тора, выход частотного фильтра через дополнительный интегратор соединен с первым входом первого компаратора, с вторым входом которого соединен 50
55
419962 15.
JQt5 20
,5
30
При этом сигнал с порогового элемента 6, поступающий на отрицательный вход сумматора 15 и несущий информацию о превышении нагрузки на заданном участке, запирает усилитель, т.е. в блок 17 идет сигнал на отключение конвейера 5. На положительный вход сумматора 15, компенсирующий отрицательный сигнал, поступает информация с элемента И 12 о наличии крупного куска. При наличии крупного куска происходит компенсация отрицательного сигнала и вместо отключения конвейера в блок 17 пойдет сигнал на уменьшение скорости транспортирования. При отсутствии сигналов о куске и превышении веса происходит транспортирование на заданной нормальной скорости. Кроме того, сигнал с сумматора 15 поступает на индикатор 7.
Формула изобретения
Устройство для предохранения опорных металлоконструкций конвейера от перегрузки, включающее датчик погонной нагрузки и датчик скорости движения ленты конвейера, соединенные с узлом запаздывания, а также последовательно соединенные интегратор, пороговый элемент и индикатор, о т- личающееся тем f что, с
повышения надежности конвейера
за счет снижения воздействия на опор- ные конструкции крупных кусков, оно дополнительно снабжено частотным фильтром, блоком вьзделения максималь- ной нагрузки, дифференциатором, дополнительным интегратором, двумя компараторами, элементом И, сумматором, блоком управления скоростью конвейера, задатчиком дифференциальной составляющей и задатчиком нормальной скорости транспортирования, причем выход датчика погонной нагрузки соединен с входами частотного фильтра, блока выделения максимальной нагрузки, дифференциатора, первыми входами узла запаздьшания и интегратора, выход датчика скорости движения ленты конвейера соединен с вторым входом узла запаздьшания, выход которого соединен с вторым входом интеграт- тора, выход частотного фильтра через дополнительный интегратор соединен с первым входом первого компаратора, с вторым входом которого соединен
5 14199626
БЫ код блока вьщеления максимальноййальной скорости транспортирования нагрузки, выход первого компаратораподключен к первому входу сумматора, соединен с первым входом элемента И,выход элемента И подключен к второму первый вход второго компаратора сое- входу сумматора, а интегратор через динен с задатчиком дифференциальнойпороговый элемент соединен с треть- составляющей, а с вторым входом сое-им входом сумматора, один выход ко- динен выход дифференциатора, выходторого подключен к индикатору, а второго компаратора подключен к вто-другой - к блоку управления конвейе- рому входу элемента И, задатчик нор- Q ром.
| Новиков Е.Е | |||
| и Сьшрнов .В.К | |||
| Теория ленточных конвейе)ов для крзтнокусковых горных пород | |||
| Киев: Наукова думка, 1983 | |||
| УСТРОЙСТВО для ПРЕДОХРАНЕНИЯ МЕТАЛЛОКОНСТРУКЦИИ | 0 |
|
SU379745A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
