10 11
7 3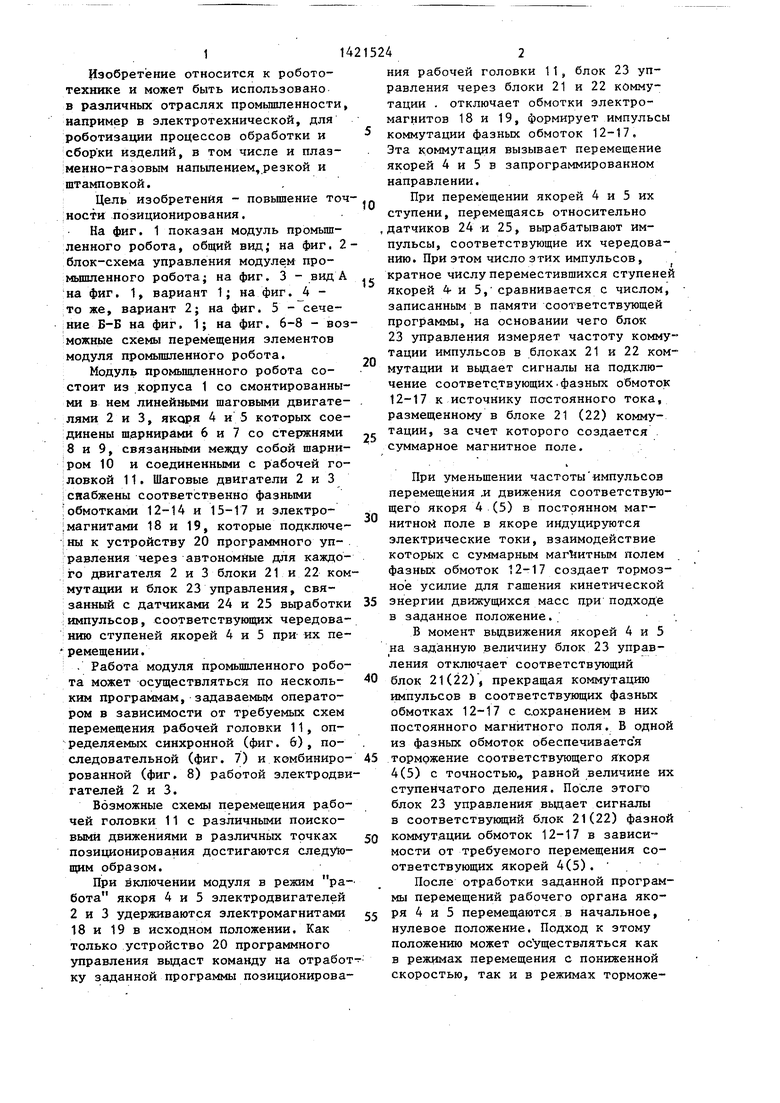

| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ КОЛЛАБОРАТИВНЫМ МНОГОЦЕЛЕВЫМ РОБОТОМ С МАШИННЫМ ЗРЕНИЕМ | 2018 |
|
RU2710709C1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2166829C1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Устройство для управления шаговым электродвигателем | 1981 |
|
SU1032584A2 |
| Способ управления 2-фазным шаговым электрическим двигателем | 2019 |
|
RU2708380C1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2610713C1 |
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| СПОСОБ ПРОГРАММНОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ МНОГОФАЗНЫМ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ЭЛЕКТРИЧЕСКИМ ДРОБЛЕНИЕМ ШАГА | 1990 |
|
RU2020725C1 |
Фиг. .
10
20
25
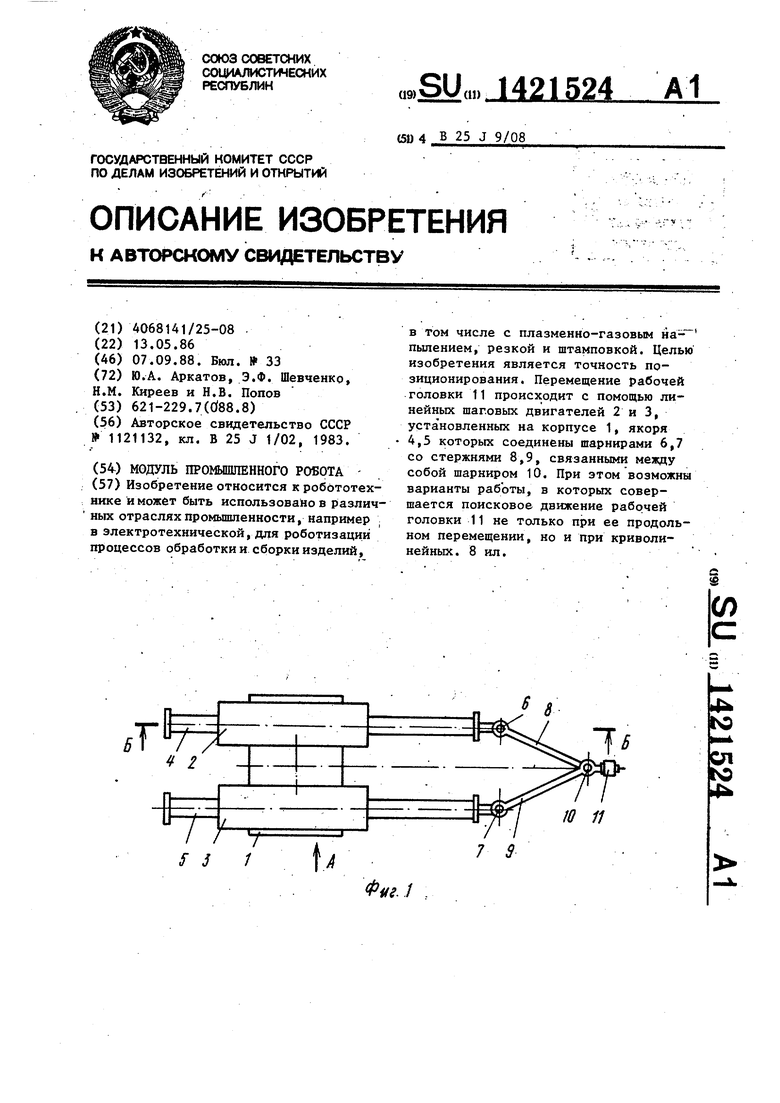
Иэобрет1ение относится к робототехнике и может быть использовано в различных отраслях промьшшенности, например в электротехнической, для роботизации процессов обработки и сборки изделий, в том числе и плаз- менно-газовым напылением, резкой и штамповкой.
Цель изобретения - повышение точности позиционирования .
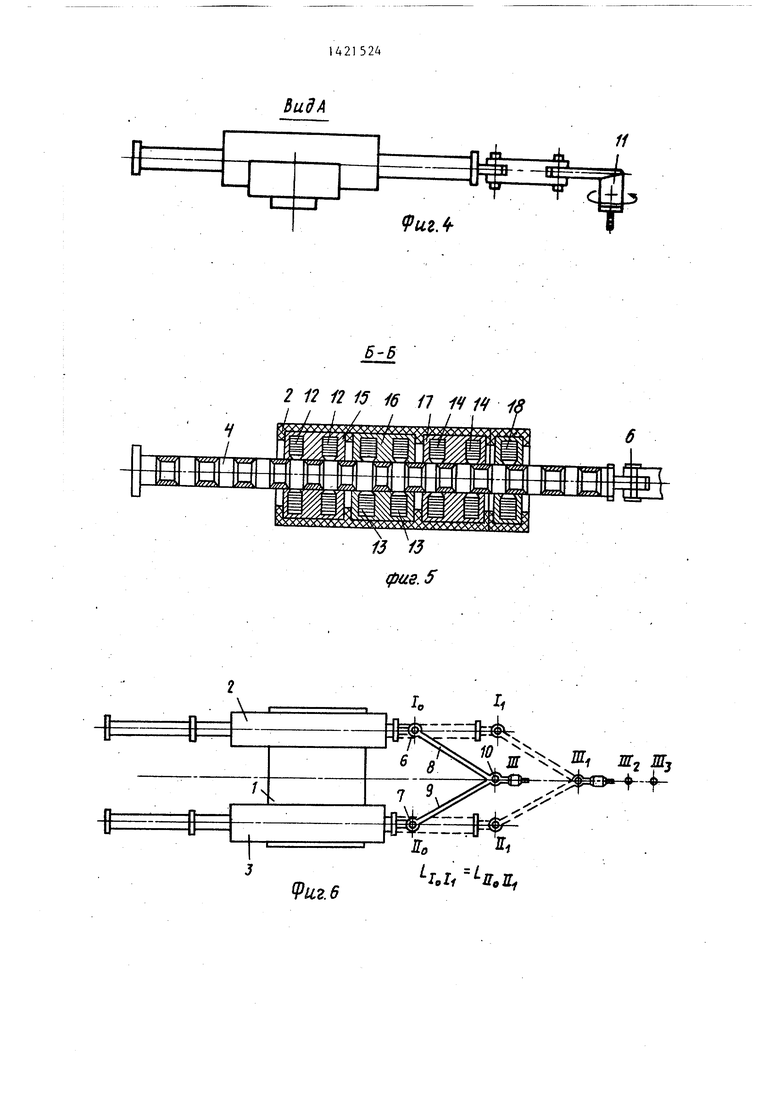
На фиг. 1 показан модуль промышленного робота, общий вид; на фиг. 2- блок-схема управления модулем про- мьшшенного робота; на фиг. 3 - вид А .- на фиг. 1, вариант 1; нафиг.4 - то же, вариант 2; на фиг. 5 - сечение Б-Б на фиг. 1; на фиг. 6-8 - возможные схемы перемещения элементов модуля промьшшенного робота.
Модуль промьшшенного робота состоит из корпуса 1 со смонтированными в нем линейными шаговыми двигателями 2 и 3, якоря 4 и 5 которых соединены шарнирами 6 и 7 со стержнями 8 и 9, связанными между собой шарниром 10 и соединенными с рабочей го- ловкой 11. Шаговые двигатели 2 и 3 сяабжены соответственно фазными обмотками 12-14 и 15-17 и электро- магнитами 18 и 19, которые подключе- нн к устройству 20 программного уп- равления через автономные для каждого двигателя 2 и 3 блоки 21 и 22 коммутации и блок 23 управления, связанный с датчиками 24 и 25 вьфаботки импульсов, соответствующих чередованию ступеней якорей 4 и 5 при их пе- ремещении.
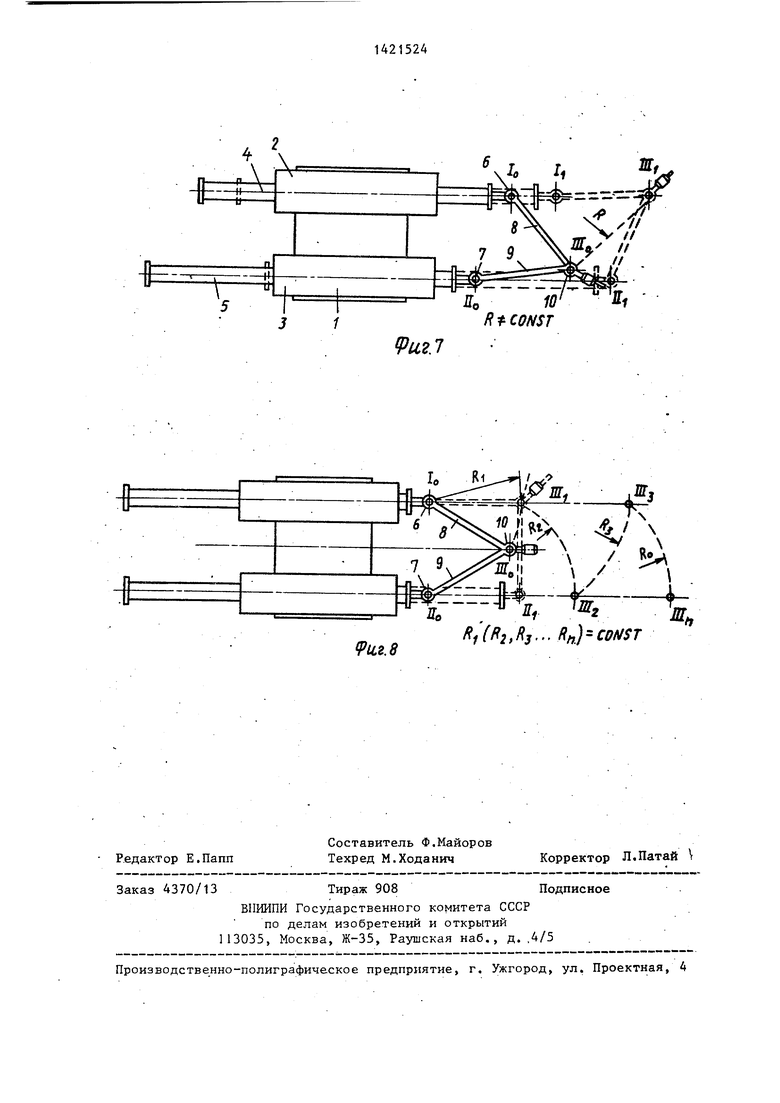
- Работа модуля промьшшенного робота может осуществляться по нескольким программам, задаваемым оператором в зависимости от требуемых схем перемещения рабочей головки 11, определяемых синхронной (фиг. 6), последовательной (фиг. 7) и комбиниро- рованной (фиг. 8) работой электродвигателей 2 и 3.
Возможные схемы перемещения рабочей головки 11 с различными поисковыми движениями в различных точках позиционирования достигаются следую- образом.
При включении модуля в режим работа якоря 4 и 5 электродвигателей 2 и 3 удерживаются электромагнитами 18 и 19 в исходном положении. Как только устройство 20 программного управления вьщаст команду на отработ-г ку заданной программы позиционирова35
45
50
55
30
40
0
5
-
ния рабочей головки 11, блок 23 управления через блоки 21 и 22 коммутации . отключает обмотки электромагнитов 18 и 19, формирует импульсы коммутации фазных обмоток 12-17. Эта коммутация вызывает перемещение якорей 4 и 5 в запрограммированном направлении.
При перемещении якорей 4 и 5 их ступени, перемещаясь относительно датчиков 24 и 25, вырабатывают импульсы, соответствующие их чередованию. При этом число этих импульсов, кратное числу переместившихся ступеней якорей 4- и 5, сравнивается с числом, записанным в памяти соответствующей программы, на основании чего блок 23 управления измеряет частоту коммутации импульсов в блоках 21 и 22 коммутации и выдает сигналы на подключение соответствующих.фазных обмоток 12-17 к источнику постоянного тока, размещенному в блоке 21 (22) коммутации, за счет которого создается . суммарное магнитное поле.
5
5
0
5
0
При уменьшении частоты импульсов перемещения л движения соответствующего якоря 4 (5) в постоянном магнитной поле в якоре индуцируются электрические токи, взаимодействие которых с суммарным маг11итным полем фазных обмоток 12-17 создает тормозное усилие для гашения кинетической энергии движущихся масс при подходе в заданное положение..
В момент вьщвижения якорей 4 и 5 на заданную величину блок 23 управления отключает соответствующий 0 блок 21(22), прекращая коммутацию импульсов в соответствующих фазных обмотках 12-17 с сохранением в них постоянного магнитного поля. В одной из фазных обмоток обеспечивается тормржение соответствующего якоря 4(5) с Точностью равной величине их ступенчатого деления. После этого блок 23 управления вьщает сигналы в соответствуклций блок 21(22) фазной коммутации, обмоток 12-17 в зависи мости от требуемого перемещения соответствующих якорей 4(5). .
После отработки заданной программы перемещений рабочего органа якоря 4 и 5 перемещаются в начальное, нулевое положение. Подход к этому положению может осуществляться как в режимах перемещения с пониженной скоростью, так и в режимах торможения и фиксации нулевого положения соответствующим электромагнитом 18 или 19.
Поисковые движения рабочей голов ки 11 реализуются при колебательном движении якорей 4 и 5 в требуемых точках позиционирования за счет того что блок 23 управления через соответствующий блок 21 и 22 коммутации осуществляет попеременную коммутацию двух фазных обмоток, например в двигателе 2 обмоток 12 и 13 с одновременной подачей постоянного тока в об 1отку 14 для снижения амплитуды колебаний.
Прямолинейное движение рабочей головки 11 (фиг. 6) реализуется при различном перемещении шарнира 6 из положения IB в I,, а шарнира 7 из положения 11 в 1Г , что соответствует перемещению шарнира 10 и рабочей головки 11 из положения Шо в Ш .
ВиП
Криволинейное движение рабочей головки 11 по траектории с переменным радиусом кривизны (фиг. 7) и с (. постоянным радиусом кривизны (фиг. 6) реализуется при расчетном перемещении соответствующих роторов двигате- 4 и 5.
леи
Формула изобретения
Модуль промышленного робота, содержащий два расположенных параллельно в одной плоскости линейных двигателя, подвижные элементы которых связаны с рабочей головкой, отличающийся тем, что, с целью повышения точности позиционирования, он снабжен двумя стержнями, а линей- ные двигатели выполнены шаговыми, при этом один из концов стержней жестко связан с рабочей головкой и шарнирно - с концом второго стержня, а вторые концы стержней шарнирно
связаны с якорями шаговых двигателей.
12 /J 1 18 Z
VtlZ.2
15 16 17 19 5
VLIZ.
5идА
Б-Б 2 12 i2 i5 i6 /7 14 1
ГД яУ tfUjQUUHJ U ад
4
п
/V
iia
9uz.
фае.
Щ ft
I,Ii -uoJL,
Яо10
Rl CONST
fPU2.7
I
&m tv
x
- B-
/ -,
I I
f 2V
Ki(P2, n)-COHST
| Рука манипулятора | 1983 |
|
SU1121132A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
