Изобретение относится к подъемно-транспортным механизмам и может быть использовано в работах по подъему и опусканию штучных грузов на различных производствах, в том числе и пожаро-взрывоопасных.
Известна пневматическая лебедка по патенту РФ №2157333, Кл. B66D 1/08, 2000, содержащая барабан, пневмодвигатель вращательного действия, сцепную муфту, соединяющую редуктор с барабаном, и пневмоцилиндр. Пневмоцилиндр выполнен двухстороннего действия, при этом его штоковая полость сообщена с выходом пневмодвигателя посредством соответствующей магистрали, а поршневая полость - посредством соответствующих магистралей и кранов, причем поступательно движущийся элемент пневмоцилиндра соединен с барабаном посредством рычажного механизма преобразования движения и муфты свободного хода, вкючающей храповое колесо, установленное на барабане, и собачку, установленную на механизме преобразования движения, а продольные оси пневмоцилиндра и барабана являются скрещивающимися прямыми. Данная лебедка применима для переноса груза только в горизонтальном направлении, что ограничивает ее возможности.
Наиболее близким по конструкции и достигаемому результату является привод подъемного устройства по патенту РФ №2339567, кл. B66F 1/08, 2008, состоящий из двух неподвижно закрепленных гидроцилиндров, через которые пропущен гибкий шток, выполненный из каната закрытой конструкции, на котором подвешен крюк для грузонесущего устройства. Гибкий шток имеет возможность быть попеременно захватываемым поршнями гидроцилиндров с цангами, которые позволяют перемещать канат с подвешенным к нему грузом. Перемещение указанных поршней происходит под действием рабочей жидкости, подаваемой в гидроцилиндры распределителями от насосного агрегата, а обеспечение согласованного движения поршней в противофазе осуществляется за счет подачи сигналов управления, поступающих от соответствующих гидроцилиндров на распределитель, через логические элементы «И».
Недостатками данного привода является то, что для выбираемого приводом, свободного конца гибкого штока выше места доставки груза требуется дополнительное пространство и то, что такой привод не обеспечивает опускание груза таким же путем, каким осуществляется его подъем, то есть, путем перехвата гибкого штока.
Цель изобретения - создание привода реечного домкрата, свободного от указанных недостатков, то есть при своей компактности способного пошагово в автоматическом режиме перемещать груз вверх или вниз. Сущность изобретения иллюстрируется примером исполнения, использования и чертежами.
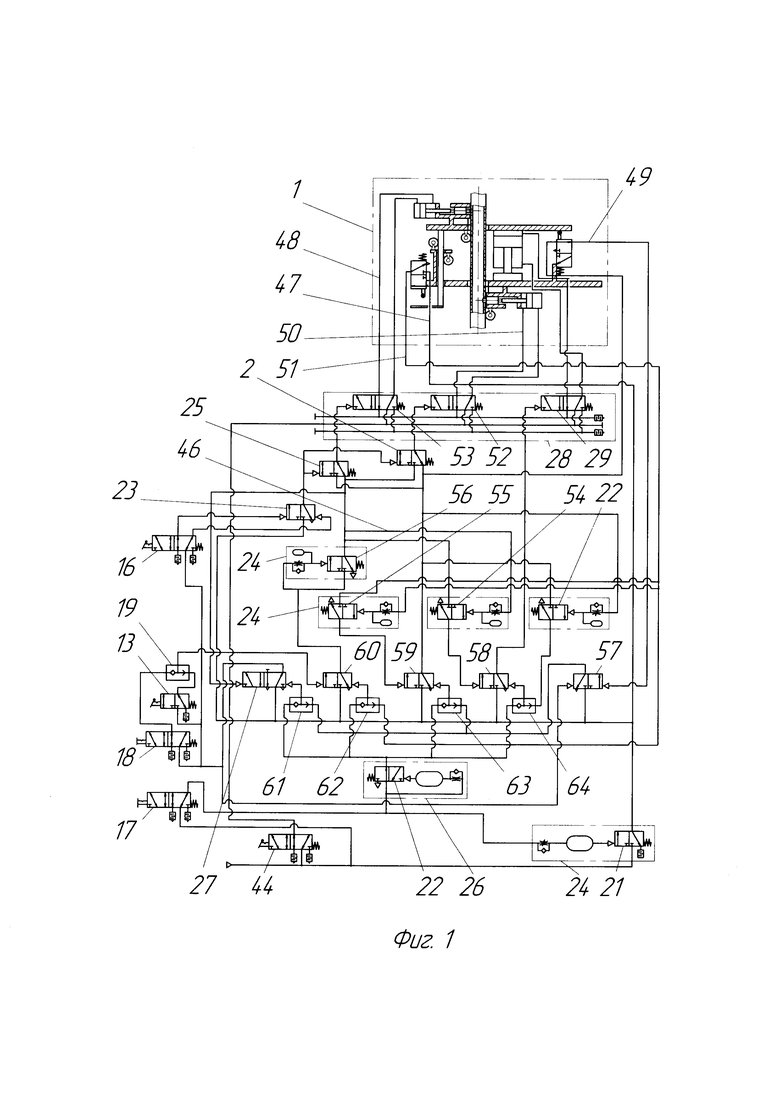
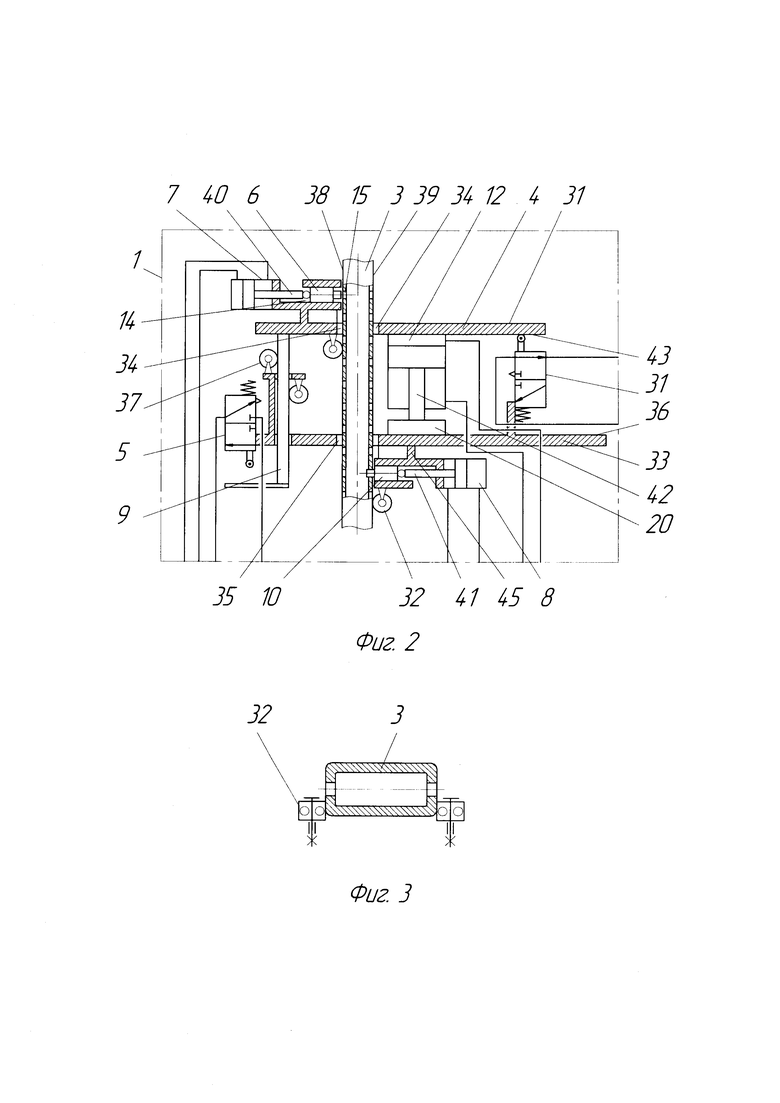
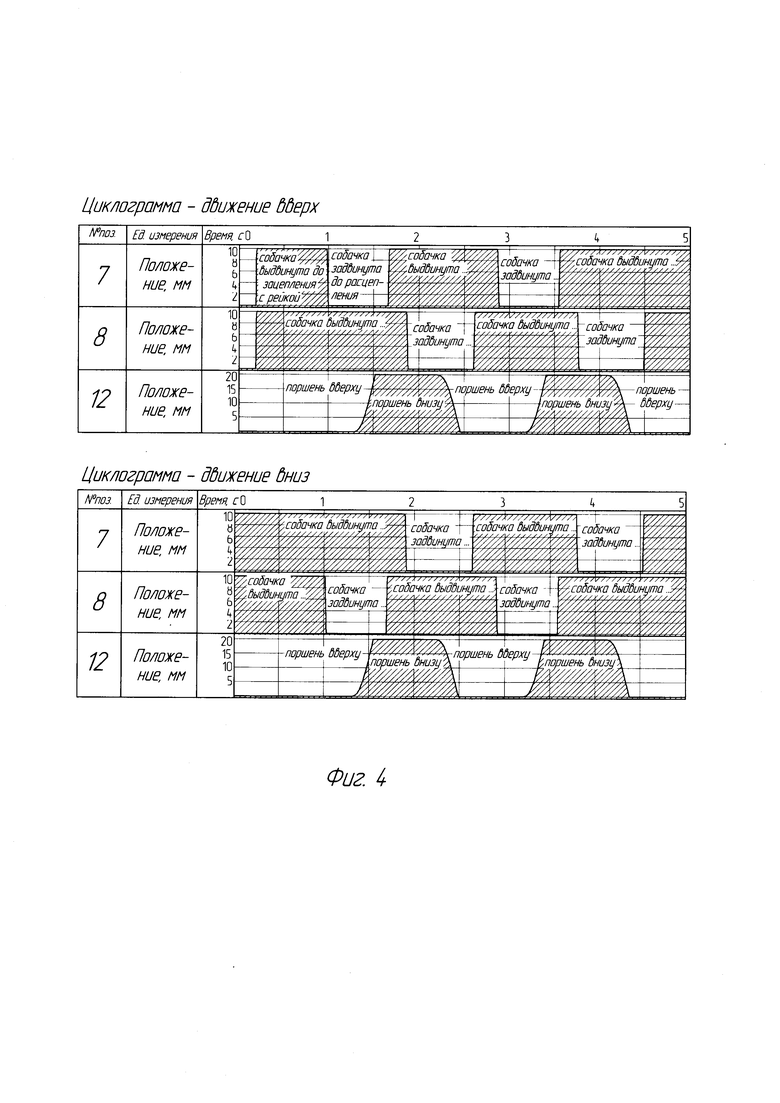
На фиг.1 показана принципиальная схема привода реечного домкрата; на фиг.2 - схематичный вид механической части реечного домкрата; на фиг.3 схематичное положение опорных роликов в плане относительно поперечно разрезанной рейки; на фиг.4 - циклограммы работы привода реечного домкрата при подъеме и опускании груза.
Привод реечного домкрата (см. далее привод) содержит реечный домкрат 1. Реечный домкрат 1 состоит из подвижной каретки 45, выполненной в виде разведенных между собой двух несущих плит 4 и 33 и связанных между собой как минимум одним поршнем со штоком 42 в цилиндре 12. Цилиндр 12 со стороны поршневой его полости жестко связан с плитой 4, а плита 33 жестко связана с противоповоротной плитой 20 штока 42 того же цилиндра 12. На несущей плите 4 имеется опорная для груза поверхность 31, а на несущей плите 33 опорная поверхность 36 для груза с уменьшенной высотой его подхвата. В соосных проемах 34 и 35 несущих плит 4 и 33 (см. далее плит) между парой опорных роликов 32 вертикально помещена неподвижная рейка 3. Один опорный ролик пары 32 установлен на верхней плите 4 в контакте с поверхностью 38 рейки 3, на стороне, противоположной опорным поверхностям 31 и 36. Второй опорный ролик пары 32 установлен на нижней плите 33 в контакте с поверхностью 39, противоположной поверхности 38 рейки 3. На противоположных сторонах рейки 3, отмеченными поверхностями 38 и 39, выполнены ряды отверстий 15 с одинаковым шагом между ними и равным величине хода поршня со штоком 41 в цилиндре 12. Напротив отверстий 15 в противоположно расположенных по одной относительно рейки 3 полостях 14 несущих плит 4 и 33 смонтированы узлы их фиксации в виде собачек 6 и 11. Собачки 6 и 11 шарнирно соединены со штоками 40 и 41 соответствующих цилиндров 7 и 8. Цилиндр 7 жестко связан с плитой 4, а цилиндр 8 с плитой 33. На плите 33 неподвижно закреплены механически управляемые два распределителя 5 и 28, а на плите 4 имеются поверхность 43 и жестко закрепленный упор 9 с возможностью взаимодействия в концах хода плит 4 и 33 с выше названными распределителями 5. Для поддержки удерживающего действия противоповоротной плиты 20 в соосном состоянии выдвинутого штока 42 и цилиндра 12 при действии груза на каретку 45 на плите 33 установлена еще одна пара опорных роликов 37 в контакте с упором 9 подобно паре опорных роликов 32. Для обеспечения включения режима подъема груза или его опускания в магистрали питания средой под давлением цилиндров 7 и 8 введены соответственно распределители 25 и 2, управляемые односторонне средой под давлением посредством ручного распределителя 16 и распределителя 23, двухсторонне управляемого магистральной средой. Распределитель 16 имеет два положения рукоятки «Вниз» и «Вверх» (на фиг.1 рукоятка находится в положении «Вверх»), Для обеспечения гарантированного разделения действий всех приводных цилиндров в питающие их магистрали и в две, питающие распределители 5 и 28, введены распределители 57, 27, 58, 59, 60, управляемые двухсторонне давлением среды. Управление каждым распределителем 27, 58, 59, 60 с одной стороны осуществляется соответствующим логическим элементом «ИЛИ» 61, 64, 63, 62. Управление распределителем 27 с другой, противоположной первой, стороны осуществляется от магистрали, соединяющей распределитель 25 с распределителем 60, проходя через распределитель 56 клапана задержки времени 24. Управление распределителем 58 с другой, противоположной первой, стороны осуществляется также от магистрали, соединяющей распределители 25 и 56, и далее по магистрали 46 посредством распределителя 54 клапана задержки времени 24. Управление распределителем 59 с другой, противоположной первой, стороны осуществляется от магистрали 51 посредством распределителя 55 клапана задержки времени 24. Управление распределителем 57 осуществляется с одной стороны по магистрали 49, а с другой стороны от распределителя 27 и распределителя 17. В привод также входит формирователь коротких импульсов 26. питающий логические элементы 61, 62, 63, 64, от его распределителя 22. Магистрали подачи среды в цилиндры 7, 8, 12 связаны с соответствующими им распределителями 53, 52, 29, управляемыми односторонне средой под давлением и пружиной. Распределители 52, 53, 29 также связаны с магистралями сброса давления рабочей среды 65 и 66. Для приведения привода в исходное положение, когда каретка зафиксирована обеими собачками, в питающей общей магистрали имеется ручной распределитель 44. Кроме того, в приводе имеются два распределителя 17 и 18 для задания одного перемещения на шаг, имеющие соответственно в нажатом состоянии фиксированное положение «Пуск» и «Стоп», и распределитель 13 для непрерывной работы привода, имеющего два положения рукоятки «Автопуск» и «Автостоп» (на фиг.1 рукоятка находится в положении «Автопуск»).
Привод реечного домкрата работает следующим образом. При подаче рабочей среды от включенного распределителя 44 к распределителю 29 в цилиндры 7 и 8 домкрата 1 штоки 40 и 41 выдвинутся и собачки 6 и 10 войдут в отверстия 15 рейки 3. На фиг.4 этот момент соответствует исходному положению привода. Вместе с тем при прохождении рабочей среды от распределителя 17 откроется распределитель 21 клапана задержки времени 24, подключенного к магистрали 47. После этого рабочая среда от распределителя 21 поступит на распределитель 27, а затем на переведенный рукояткой распределитель 13 в положение «Автопуск». Далее на логический элемент «ИЛИ» 19 и соответственно на управление распределителем 60. В результате распределитель 60 откроется. Тогда от него рабочая среда, проходя распределитель 56 клапана задержки времени 24, затем распределитель 25 и в конце пути пройдя на управление распределителем 53, переключит последний. В результате рабочая среда от распределителя 53 по магистрали 48 поступит в штоковую полость цилиндра 7. В итоге рейка 3 освободится от собачки 6. От магистрали, питающей распределитель 25 и магистраль 46, рабочая среда, управляя распределителем 54 клапана задержки времени 24, подаст давление среды на управление распределителем 58 и откроет его. Тогда от распределителя 58 рабочая среда пойдет на управление распределителем 29 и перестроит его на подачу рабочей среды от него в поршневую полость цилиндра 12. В результате несущая плита 4 переместится вверх на шаг. При этом упор 9 в конце хода плиты 4 откроет распределитель 5 для потока рабочей среды от магистрали 47 к логическому элементу «ИЛИ» 62 и одновременно к распределителю 55 клапана задержки времени 24. В результате распределитель 56 перестроится на сброс давления рабочей среды в магистрали управления распределителем 53 и в магистрали 48 цилиндра 7. После чего собачка 6 войдет в зацепление с рейкой 3. После срабатывания клапана задержки времени 24 (открытия распределителя 55) давление рабочей среды поступит на управление распределителем 59. В результате рабочая среда от распределителя 59 поступит на управление распределителем 52 и распределителю 22 клапана задержки времени 24. В результате через магистраль 65 произойдет сброс давления рабочей среды из поршневой полости цилиндра 8 и нагнетание по магистрали 50 давления рабочей среды в штоковую полость цилиндра 8. Собачка 10 выйдет из зацепления с рейкой 3. При открытии распределителя 22 рабочая среда попадет через логический элемент «ИЛИ» 63 на управление распределителем 58. После чего произойдет сброс давления рабочей среды из управляющей магистрали распределителем 29 и возврат его в исходное положение. Как следствие последнего произойдет сброс рабочей среды по магистрали 66 из поршневой полости цилиндра 12 и подача рабочей среды в его штоковую полость. После чего несущая плита 33, связанная со штоком 42 цилиндра 12, поднимется вверх на шаг. В конце хода поршня цилиндра 12 вверх распределитель 28 переключится на подачу рабочей среды в магистраль 49, управляющую распределителем 57 и тем самым, открывая подачу рабочей среды через логический элемент «ИЛИ» 61 на управление распределителем 27, вернет его в исходное положение. Это же рабочая среда через логический элемент «ИЛИ» 63 произведя управление распределителем 59, произведет также управление распределителем 52. Давление рабочей среды в штоковой полости цилиндра 8 по магистралям 50 и 66 сбросится, а давление в поршневой полости цилиндра 8 появится. В результате собачка 10 войдет в зацепление с рейкой 3. Цикл подъема каретки 45 домкрата 1 на шаг завершится. На циклограмме «движение вверх» этот момент работы привода показан перед окончанием второй секунды (1,7 с) и четвертой (3,55 с). Если кнопка распределителя 18 не отпущена, то процесс подъема каретки домкрата I на шаг повторится. Однократное включение распределителя 18 перемещает каретку домкрата 1 на один шаг. При удержании во включенном состоянии распределителя 18 движение каретки 45 домкрата 1 будет осуществляться пошажно, не прерываясь, до момента выключения распределителя 18. Включение распределителя 18 производится только при положении распределителя 13 в положении «Автостоп». Для опускания груза распределитель 16 переведем в положение «Вниз». При этом распределитель 44 включить нажатием его рукоятки, а распределитель 18 перевести в положение «Пуск». Тогда от открытого распределителя 21, расположенного на магистрали 47, рабочая среда, проходя, последовательно распределители 27 и 16, откроет распределитель 23. В результате подаваемая через него рабочая среда переключит распределители 25 и 2. То есть рабочая среда от открытого распределителя 60, проходя, распределитель 56 клапана задержки времени 24, затем распределитель 2, произведет управление распределителем 52. После чего рабочая среда через распределитель 52 направится в штоковую полость цилиндра 8, а его поршневая полость соединится с магистралью 65 сброса давления. В результате рейка 3 освободится от собачки 10. Одновременно по магистрали 46 рабочая среда, управляя распределителем 54 клапана задержки времени 24, подаст давление рабочей среды на управление распределителем 58 и откроет его. Тогда от распределителя 58 рабочая среда пойдет на управление распределителем 29 и перестроит его на подачу рабочей среды от него в поршневую полость цилиндра 12 и на сброс рабочей среды из штоковой полости цилиндра 12. В результате несущая плита 33 переместится на шаг вниз. При этом упор 9 в конце хода несущей плиты 33 откроет распределитель 5 для потока рабочей среды по магистрали 47 к логическому элементу «ИЛИ» 62. После этого через распределитель 56 клапана задержки времени 24 и распределитель 2 произойдет сброс давления рабочей среды в магистрали управления распределителем 52 и подача рабочей среды в поршневую полость цилиндра 8. Собачка 10 войдет в зацепление с рейкой 3. По магистрали 51 от включенного распределителя 5 рабочая среда поступит к распределителю 55 клапана задержки времени 24 и затем на управление распределителем 59. Рабочая среда от распределителя 21 магистрали 47 через распределитель 59 и распределитель 25 поступит на управление распределителем 53. В результате рабочая среда по магистрали 47 поступит в штоковую полость цилиндра 7, а из поршневой полости рабочая среда направится на сброс. Собачка 6 выйдет из зацепления с рейкой 3. При этом в магистрали 46 отсутствует давление рабочей среды, так как она соединена с магистралью, управляемой логическим элементом «ИЛИ» 62 через распределитель 56 клапана задержки времени 24 и распределитель 60 на сброс рабочей среды. Соответственно в управляющей магистрали распределителем 29 также будет отсутствовать давление рабочей среды. Тогда рабочая среда от распределителя 29 поступит в штоковую полость цилиндра 12, а из поршневой полости рабочая среда направится на сброс. В результате несущая плита 4 переместится вниз на шаг. При этом в конце хода плиты 4 закроется распределитель 5. Следовательно, в магистрали 51 будет отсутствовать давление рабочей среды, а значит, то же самое будет происходить в управляющей магистрали, исходящего от распределителя 55 клапана задержки времени 24, распределителя 59. В свою очередь откроется распределитель 31 для потока рабочей среды по магистрали 49 на управление распределителем 57, перестроив его на подачу рабочей через него от распределителя 21 клапана задержки времени 24 на логический элемент «ИЛИ» 63. В результате подача рабочей среды через распределитель 59, а значит и подача на управление распределителем 53, прекратится. Произойдет сброс давления рабочей среды в магистрали управления распределителем 53 и в магистрали 48 цилиндра 7. Одновременно произойдет подача рабочей среды под давлением в поршневую полость цилиндра 7. После этого собачка 6 войдет в зацепление с рейкой 3. На этом цикл перемещения груза на один шаг завершится. На циклограмме «движение вниз» этот момент работы привода показан перед окончанием второй секунды (1,9 с) и четвертой (1,75 с). Время ходов поршней (штоков 40, 41, 42) цилиндров 7, 8, 12 характеризуется крутизной наклона кривых циклограмм, а продолжительность удержания поршней (штоков 40, 41, 42) в соответствующей позиции характеризуется длиной прямых горизонтальных линий. Продолжительность указанных пауз между действиями поршней цилиндров обеспечивается клапанами задержки времени 24. Работа клапанов задержки времени 24 способствует очередности действий привода реечного домкрата. Продолжительность одного цикла перемещения груза приводом при условии использования в качестве рабочей среды сжатого воздуха на один шаг, условно составит около двух секунд.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шлифовальный станок для обработки камня | 1984 |
|
SU1222506A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2037677C1 |
| Пресс | 1982 |
|
SU1143605A1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Устройство для управления проходческимКОМбАйНОМ | 1979 |
|
SU815116A1 |
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| СПОСОБ ПРЕССОВАНИЯ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ПРИВОДОМ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2346816C2 |
| Машина для сварки трением | 1988 |
|
SU1637982A1 |
| Гидравлический привод для ударногоСТРугА | 1979 |
|
SU815289A1 |
| Протаскивающее устройство сучкорезной машины | 1978 |
|
SU729051A1 |
Изобретение относится к подъемно-транспортным механизмам и может быть использовано в работах по подъему и опусканию штучных грузов. Привод реечного домкрата содержит каретку, состоящую из двух разведенных между собой несущих плит за счет связанного с ними как минимум одного цилиндра со штоком, работа без заеданий, которых обеспечена за счет пары опорных роликов, установленной на одной несущей плите между упором, закрепленным на другой несущей плите. В соосные проемы несущих плит, между парой их опорных роликов, обеспечивающих устойчивое положение каретки от воздействия груза, вставлена неподвижная рейка. На сторонах рейки, обращенных к роликам, выполнены с одинаковым шагом отверстия, равным ходу штока цилиндра. Напротив отверстий в противоположно расположенных по одной относительно рейки полостях каждой из несущих плит смонтировано по собачке, шарнирно соединенной со штоком цилиндра, с возможностью сцепления с рейкой. Обеспечивается цикловая слаженность работы цилиндров со штоками за счет подсоединенных к ним посредством магистралей передачи рабочей среды от источника распределителей, логических элементов «ИЛИ», клапанов задержки времени и формирователя коротких импульсов соответствующим образом. 4 ил.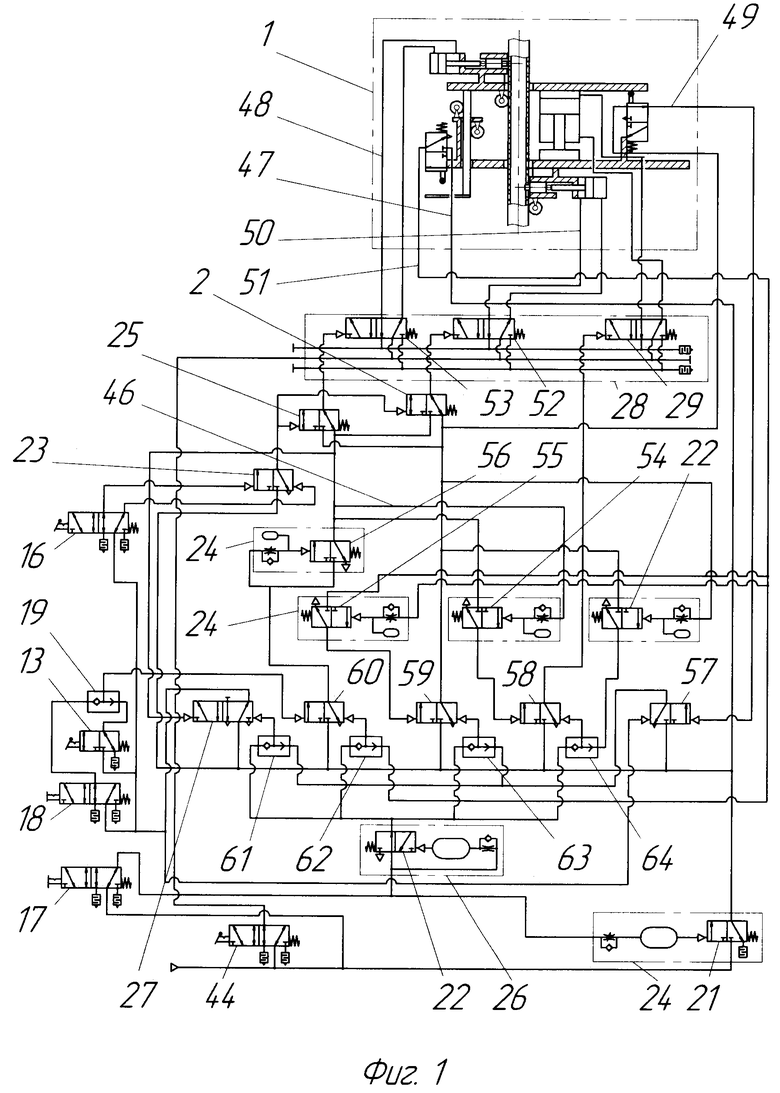
Привод реечного домкрата, содержащий приводной элемент в виде поршня со штоком в цилиндре, задающего перемещение груза, два узла фиксации с приводными элементами в виде штоков и цилиндров, распределители, сообщающие рабочие полости цилиндров с источником питания и сбросом давления рабочей среды, отличающийся тем, что между одним как минимум поршнем со штоком в цилиндре имеются, связанные с ними, две несущие плиты, образующие каретку, при этом верхняя несущая плита жестко связана с цилиндром, а нижняя с противоповоротной плитой штока, кроме того она же несет распределители, с возможностью одного переключаться при взаимодействии его с верхней несущей плитой, а другого с упором, установленным на ней же, вместе с тем, в соосные проемы каретки между парой опорных роликов, обеспечивающих устойчивое ее положение от воздействия груза, вставлена неподвижная прямоугольного сечения рейка, причем один опорный ролик пары установлен на верхней несущей плите, а другой на нижней, при этом на сторонах рейки, обращенных к роликам, выполнены отверстия с шагом между их центрами, равным величине хода поршня со штоком, кроме того напротив отверстий рейки в противоположно расположенных по одной относительно рейки полостях каждой из несущих плит смонтировано по узлу фиксации в виде собачки, шарнирно соединенной со штоком цилиндра, с возможностью сцепления ее с рейкой, причем на нижней плите закреплена пара опорных роликов, контактирующей с упором верхней несущей плиты, подобно первой паре, а для осуществления в автоматическом режиме последовательной работы цилиндров со штоками их непосредственно питающие распределители, управляются в соответствующей последовательности потоками рабочей среды, направляемыми по магистралям от ряда распределителей, в том числе и от распределителей, закрепленных на нижней несущей плите, запитанных при этом от источника рабочей среды через клапан задержки времени, а также управляемых, кроме последних, взаимодействующих с упором и поверхностью плиты, потоками рабочей среды, отводимыми от соответствующих выше названных магистралей через клапаны задержки времени, обеспечивающих при этом паузы между потоками, и подключенных к бесклапанным входам логических элементов «ИЛИ», вместе с тем их клапанные входы соединены с формирователем коротких импульсов, сообщающимся через ручной распределитель с источником питания, кроме того для осуществления подъема и опускания груза к управляющим магистралям распределителей, сообщающихся с цилиндрами привода собачек, подключены своими входами два распределителя, причем один из них напрямую, а другой перекрестно, при этом управляемых параллельно распределителем, который в свою очередь управляется ручным распределителем.
| Гидравлический домкрат | 1986 |
|
SU1444292A1 |
| JP 3262872 А, 22.11.1991 | |||
| JP 7119521 B, 20.12.1995 | |||
| ПРИВОД ПОДЪЕМНОГО УСТРОЙСТВА | 2007 |
|
RU2339567C1 |
