/
Г+гЫ-п
4
Ю
О О5
с
i Изобретение относится к грузоподъем- HiLiM механизмам, в частности к устройствам, обеспечивающим автоматическое отцепление стропа от крюка грузоподъемной машины при достижении грузом опорной поверхности.
Цель изобретения - повышение надеж- ност,и.
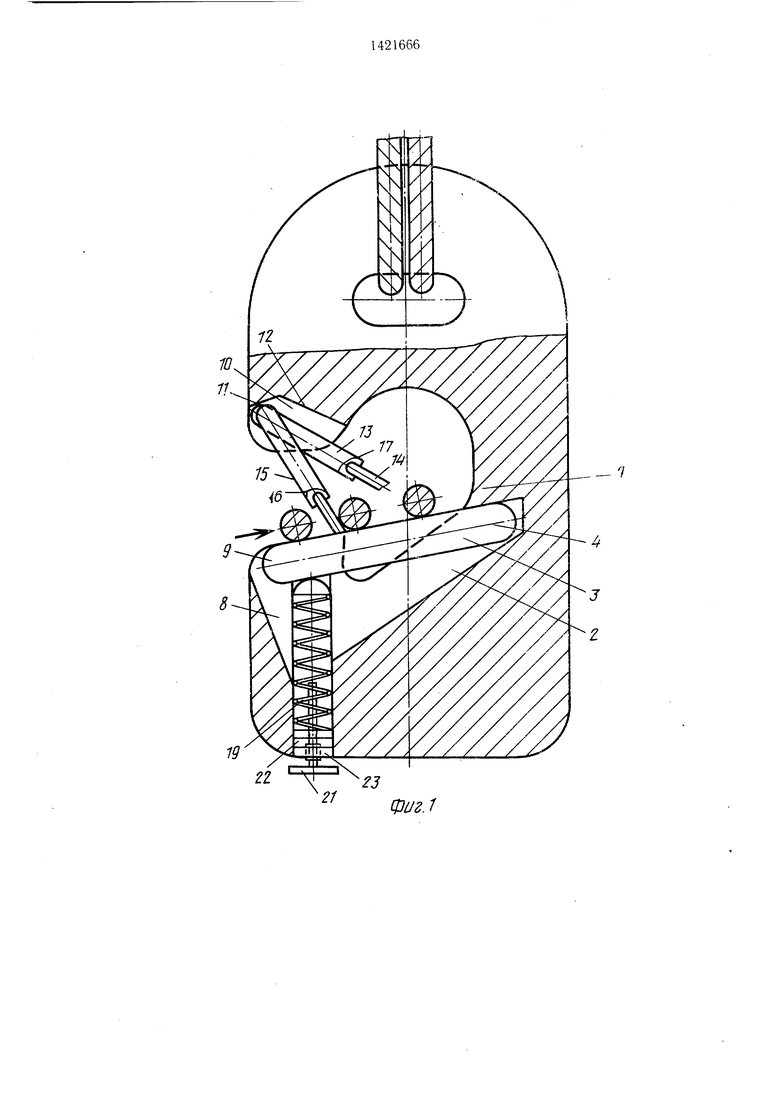
i На фиг. 1 изображено устройство в момент заведения стропов, общий вид; на фиг. 2 - то же, в рабочем состоянии; на фиг. 3 - то же, в момент освобождения йтропов.
Самоотцепляющееся захватное устройство содержит корпус 1, выполненный в виде крюка с криволинейным пазом 2, палец .3, один конец 4 которого шарнирно установлен В пазу 2, защелку 5, шарнирно установленную одним концом 6 в корпусе 1. Корпус 1 выполнен с выступом 7, расположенным со стороны шарнирно закрепленного конца 4 :;пальца 3 для его фиксации. В корпусе 1 вы- :Полнено углубление 8 для размещения в нем ;свободного конца 9 пальца 3 и дополнитель- ный фигурный паз 10, выполненный в верхней части корпуса 1 над рогом, образованным скошенными в вертикальной плоскости гранями 11 и 12.
В дополнительном фигурном пазу 10 размещена зашелка 5, представляющая собой соединенные по одной прямой прямолинейные элементы 13 и 14, второй 14 из которых подпружинен относительно первого 13 и шар- нирно установлен на его свободном конце 15, выполненном со скосом 16 и выступом 17, выполненным на стороне, обращенной к внутренней поверхности зева корпуса. Длина защелки 5 равна или больше расстояния от точки ее шарнирного соединения с корпусом 1 до крайней верхней точки 18 рога корпуса. Устройство также снабжено выбрасывающей палец 3 пружиной 19, установленной в углублении 8 корпуса 1 и взаимодействующей со свободным концом 9 пальца 3.
Самоотцепляющееся захватное устройство работает следующим образом.
В исходном положении палец 3 находится в крайнем верхнем положении, фиксированном выступом 7 криволинейного паза 2. Защелку 5 вручную поворачивают до касания ее с гранью 12 дополнительного фигурного паза 10, освобождая зев корпуса для размещения в нем стропа 20.
После заведения стропа 20 в зев корпуса 1 защелка 5 по часовой стрелке под дей- ствием пружины, установленной на оси шарнирного закрепления защелки (не показана), поворачивается и устанавливается в рабочем положении, когда второй элемент Г4 защелки 5 упирается в крайнюю верхнюю точку 18 рога корпуса. Самопроизвольное вращение по часовой стрелке шарнирно соединенных между собой прямолинейных эле
ментов 13 и 14 защелки 5 невозможно, так как движение второго элемента 14 ограничено выполненным в первом элементе 13 выступом 17. Таким образом, строп 20 зафиксирован в зеве корпуса.
Груз поднимают. Палец 3 под действием веса поднимаемого груза опускается вниз, сжимая пружину 19, и занимает крайнее нижнее положение в криволинейном пазу 2, размещаяс. в углублении 8. Строп также опускается вниз и оказывается захваченным зевом корпуса. Под действием пружины, расположенной на оси вращения защелки 5, она поворачивается и занимает крайнее левое положение, ограниченное гранью 11 дополнительного фигурного паза 10. В этом состоянии транспортируют груз.
При опускании груза на землю строп 20 ослабевает, палец 3 под действием выбрасывающей пружины 19 поворачивается и занимает крайнее верхнее положение, ограниченное выступом 7 корпуса 1. В результате этого строп 20 скатывается по наклонной верхней образующей пальца 3 и выходит из зева корпуса. Таким образом происходит автоматическое сбрасывание стропа.
В предлагаемом устройстве предусмотрен механизм регулирования силы сжатия пружиныТ9, состоящий из винта 21, подвижной гайки 22 и крышки 23, который позволяет в зависимости от условий работы из- .менять порог срабатывания пальца 3.
Формула изобретения
Самоотцепляющееся захватное устройство, содержащее корпус, выполненный в. виде крюка с пазом, палец, одним концом размещенный в упомянутом пазу, и шарнирно закрепленную одним концом на корпусе защелку, отличаюш ееся теы, что, с целью повышения надежности, корпус выполнен с выступом, расположенным со стороны упомянутого конца пальца для его фиксации, углублением для размещения в нем свободного конца упомянутого пальца и дополнительным пазом в верхней части корпуса над его рогом, образованным скошенными в вертикальной плоскости гранями, в котором размещена защелка, включающая в себя два элемента, второй из которых подпружинен относительно первого и шарнирно установлен на его свободном конце, выполненном со скосом и выступом на стороне, обращенной к внутренней поверхности зева крюка, при этом защелка выполнена длиной, равной или большей расстояния от точки ее шарнирного соединения с корпусом до крайней верхней точки рога крюка, а устройство снабжено пружиной, установленной в углублении корпуса с возможностью взаимодействия со свободным концом пальца.
19
21
фиг. 1
1
22
CPU2.J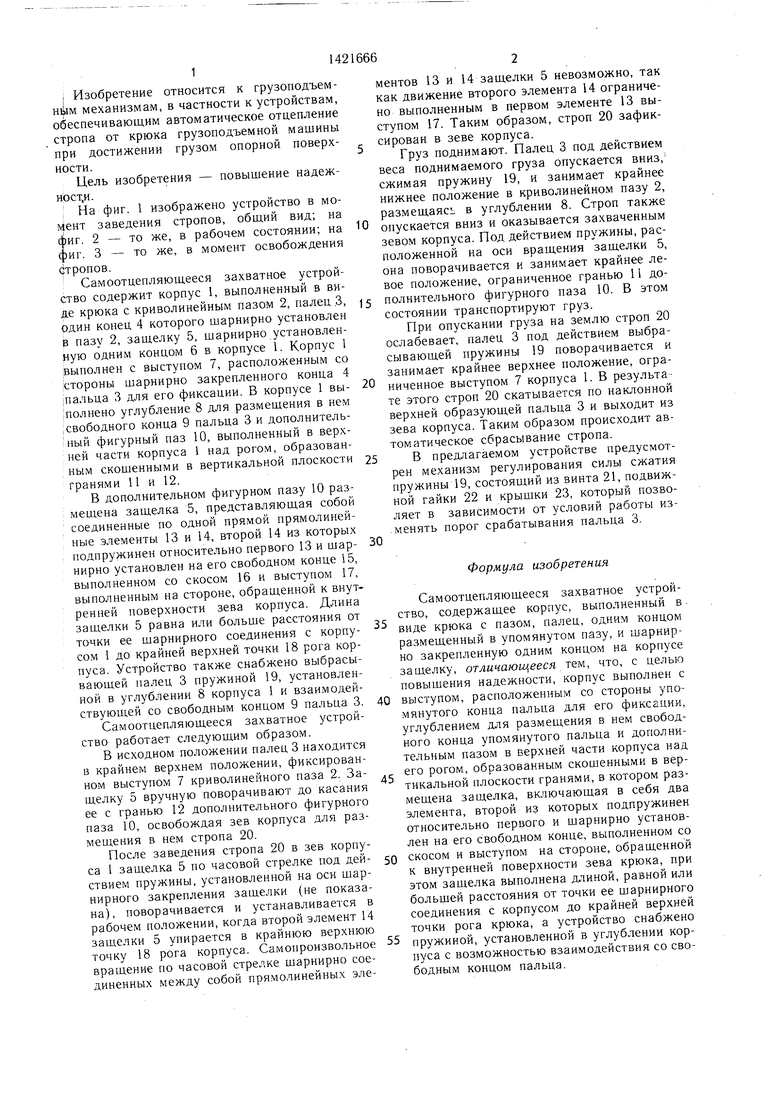
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1977 |
|
SU691378A1 |
| Грузозахватное устройство | 1983 |
|
SU1172861A1 |
| Крюк | 1980 |
|
SU965945A1 |
| Саморасцепляющееся грузозахватное устройство | 1990 |
|
SU1754620A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Грузозахватное устройство | 1978 |
|
SU880944A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ БОЛЬШОГО ДИАМЕТРА | 2003 |
|
RU2245292C2 |
| Захват для поддонов | 1980 |
|
SU935429A1 |
| Замок для стропа | 1983 |
|
SU1197976A1 |
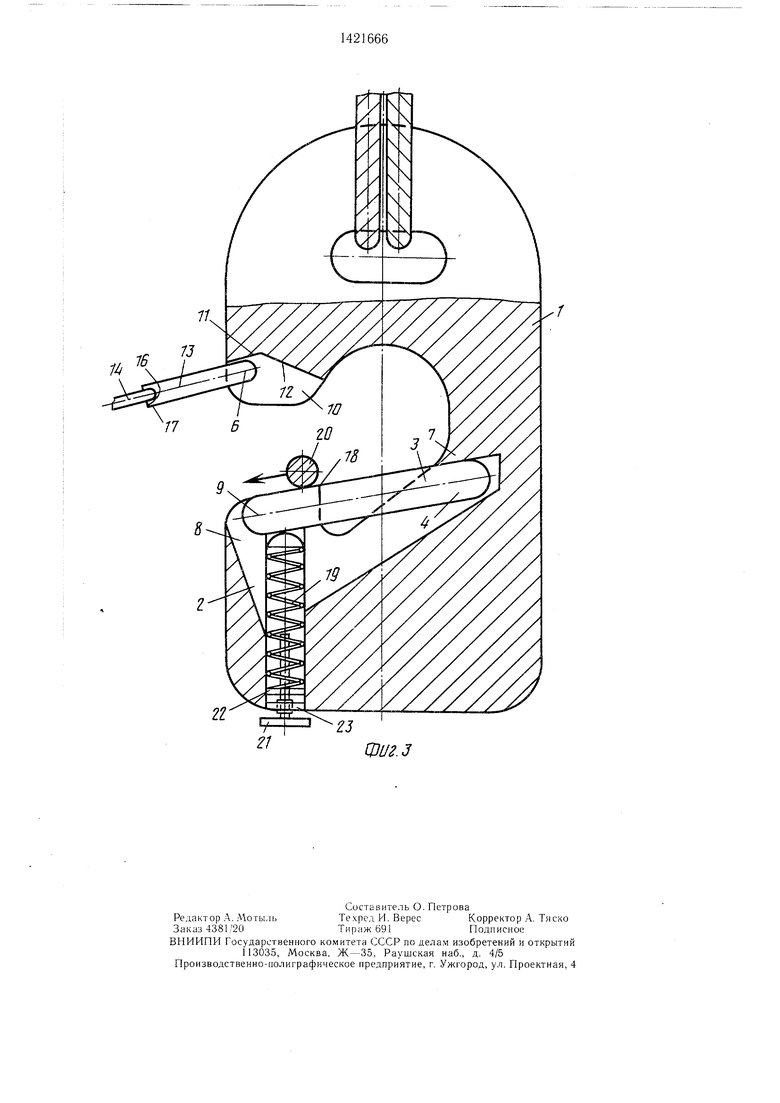
Изобретение относится к грузоподъемным механизмам и предназначено для автоматического отцепления стропа от крюка грузоподъемной машины при достижении грузо.м опорной поверхности. Целью изобретения является повышение надежности. Строп 20 заводят в зев корпуса 1, отклоняя защелку 5 против часовой стрелки, после чего она устанавл-ивается в рабочее положение, фиксируя строп в зеве. Под действие.м веса поднимаемого груза палец 3 опускается в криволинейном пазу 2, сжимая пружину J9, при этом строп 20 опускается и фиксируется внутренней поверхностью рога корпуса 1, а защелка 5 занимает крайнее левое положение. При опускании груза на землю строп 20 ослабевает, налец 3 под действием 1ру.жи1-:ы 19 зани.мает крайнее верхнее положение, ог раниченное выступол 7 корпуса 1. Строп 20 скатывается по наклонной верхней образ ю щей пальца 3, освобождая зев корпуса. 3 и. 1.
| Фиксирующее устройство захватного органа | 1972 |
|
SU466162A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
