(54) ЗАХВАТ ДЛЯ ПОДДОНОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Грузозахватное устройство | 1983 |
|
SU1118600A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Захват для контейнеров | 1980 |
|
SU956410A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Грузозахватное устройство | 1990 |
|
SU1776624A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| Рым-болт для подъема изделий | 1978 |
|
SU775040A1 |
Изобретение относится к транспортным средствам, в частности к грузозахватНым устройствам.
Известен захват для поддонов, содержащий пространственный каркас и захватное устройство, вьтолненное в виде подхватных скоб с жестко закрепленными на них подвесными серьгами 1.
Недостатком указанного за:хвата является то, что при ослаблении стропов необходимо придерживать крюки стропов в отверстиях серьг, кроме того, для каяодого захвата поддона и его отцепления требуется перестановка крюков из одного отверстия серьг в другое, т.е. работа захвата обеспечивается как минимум двумя стропальщиками.
Цель изобретения - повышение производительности процессов захвата и отцепления поддонов.
Цель достигается тем, что захват снабжен траверсой с петлей для навешивания на грузоподъемное средство и шарнирно прикрепленными тягами, на концах которых закреплены пальцы, размещенные в пазу, выполненном в серьге, которая выполнена с гнездом для упомянутой тяги и снабжена
ш.г.рнирно прикрепленным к ней седлом .
Кроме того, петля снабжена жестко прикрепленной к ней пластиной, изогнутой по формле наружной части крюка.
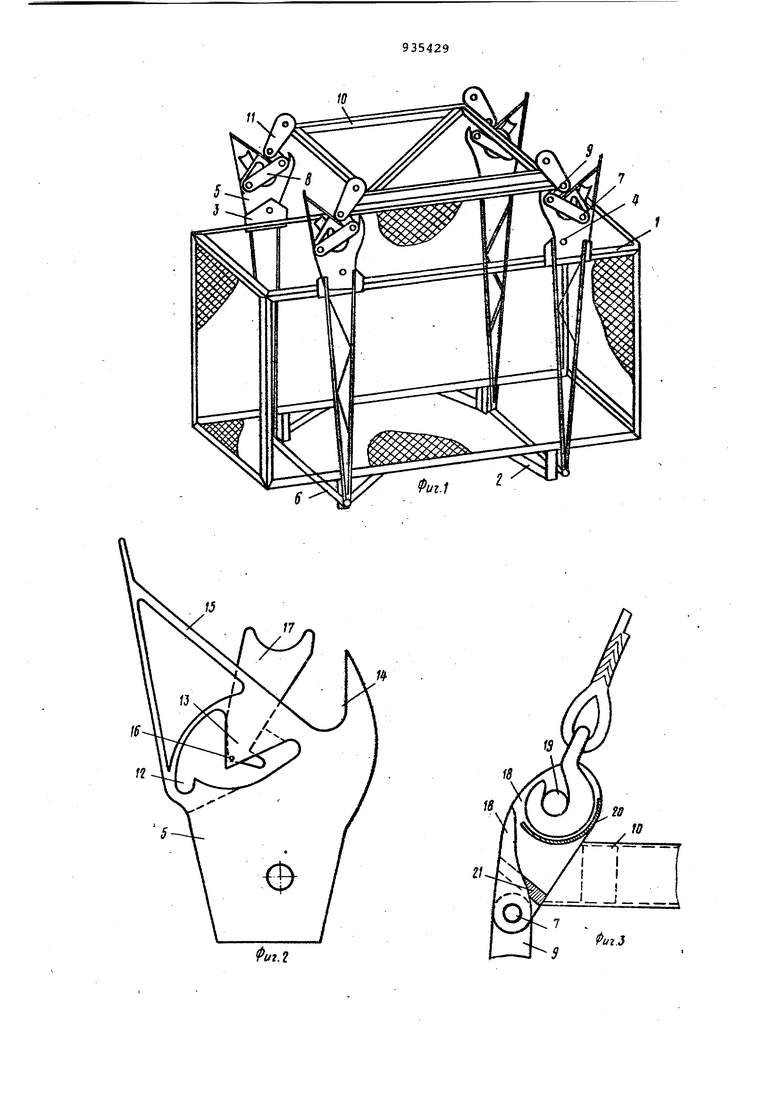
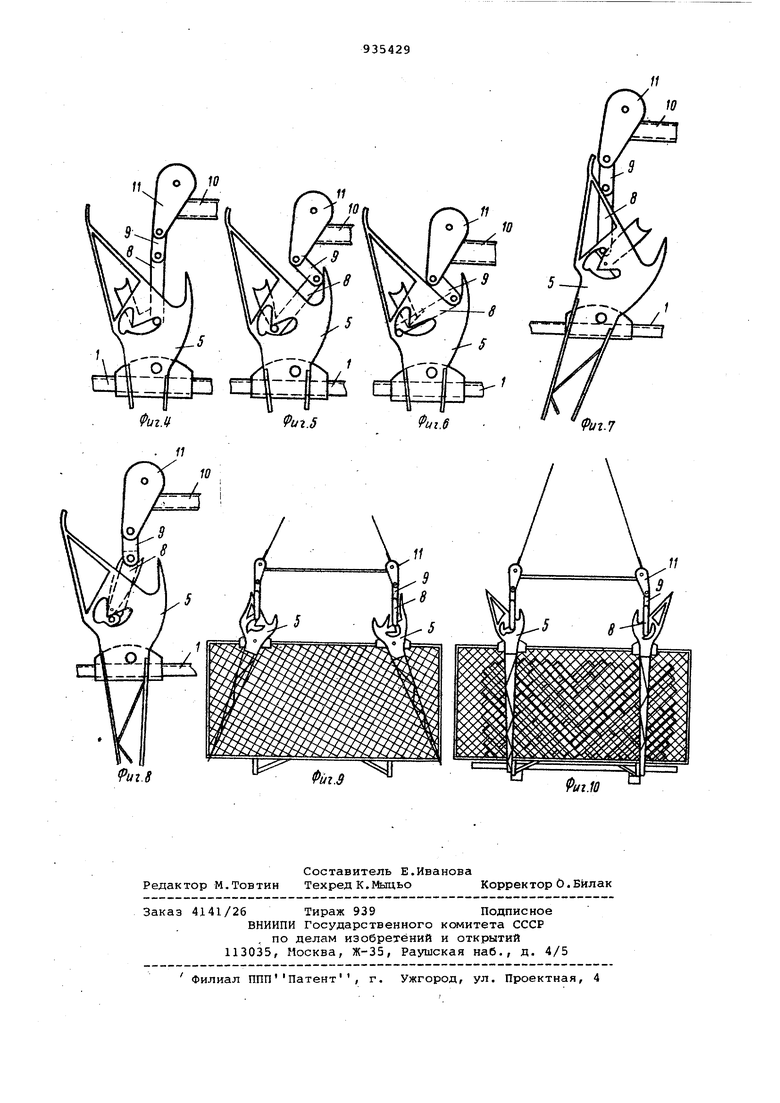
На фиг.1-изображен захват, общий вид; на фиг.2 - серьга, общий вид; на фиг.З - петля, частичный разрез;
10 на фиг.4, 5 и б - захватная скоба, рабочее положение; на фиг.7, 8, 9 то же, при выходе ее из рабочего положения; на фиг.Ю - захват, рабочее положение.
15
Захват для поддонов состоит из пространственного каркаса 1, представляквдега собой прямоугольный параллелепипед, боковые и торцовые стороны которого обтянуты металли20ческой сеткой. Каркас выполнен с учетом свободного прохода в нем поддона с грузом, на подставках 2 по высоте равных две трети высоты псэддона, чтобы при поднятом состоянии
25 поддон не был ниже основания каркаса, в целях предотвращения выпадения штучных грузов. Наверху каркаса с обеих боковых сторон его монтированы четыре пластины 3 с отвер30стиями для навешивания механизма.
осуществляющего автоматический захват и отцепление поддонов. На пластины 3 посредством осей 4 с наружных сторон, каркаса навешиваются четыре серьги 5, попарно и жестко связанные между собой захватными скобами б (типа качели). Посредством пальцев 7 тяг 8 и 9 на серьги устанавливается рамная траверса 10 с четырьмя подхватными петлями 11 для строповки четырехэвенным стропом. Серьга 5 выполнена из двух щек с фигурным отверстием 12, клиновидным внутренним выступом 13, наружным посадочным гнездом 14 и ограничителем 15. Между щек на клиновидном выступе посредством оси 16 установлено откидывагодееся седло i7. ПетЛя 11 траверсы 10 выполнена из двух щек 18, наклоненных одна к другой/ образуя V -образную конструкцию. Щеки соединены 4eждy собой осью 19 для зацепления крюком стропа пластиной 20 повторяищей наружный профиль крюка, для удержания крюка а также упором 21, ограничивающим поворот тяги 9 при опускании траверсы, для проталкивания нижней оси тяги 8 в углубление фигурного отверстия. При ослаблении стропов крюки ложатся в профиль, образуемый пластиной 20, поворачиваются под вессм стропов, входя в более глубокое зацепление, предотвращая самопроизвольное отцепление.
Захват работает следующим образом.
Подцепив четырехзвенным стропом за петли траверсы и приподняв захват, крановщик определяет положение захватных скоб. Обычно они находятся в отвесном положении Захвачено. Захват опускается на землю до полного ослабления стропов. При этом тяги 9 ложатся в гнезда 14 нижние пальцы 7 тяг 8 продвигаются в углубления фигурных отверстий 12. Захват поднимается вновь, при этом нижние пальцы 7 тяг 8, выходя из углублений отверстий 12, попадают на вертикальную плоскость выступа 1 и поднимаются до упора. При дальнейшем подъеме серьги 5 поворачиваются на осях 4, так как точки приложения сил смещены относительно оси симметрии серег и жестко связанных с ними скобами 6. Захватные скобы занимают крайнее наклонное положение, выходя из-под каркаса. При этом одновременно отбрасываются в сторону гнезда 14 седла 17. Захват раскрыт.
поднимается, подводится к -поддону с грузом, опускается на него до полного ослабления стропов. При этом поддон с пакетом груза находится внутри каркаса, захватные скобы под J собственным весом занимают вертикальное положение, заходят под поддон с каркасом,а траверса своими короткими тягами 9 садится в седла 17. Нижние пальцы 7 тяг 8, опускаясь по
Q клиновидному выступу, заходят под него. Захват готов к подъему поддона. Производится подъем захвата с поддоном. Нижние пальцы 7 тяг 8, поднимаясь, заходят дальше под выступы до упора, отбрасывают откиды5вающиеся седла, добирая свободный ход подхватных скоб. Поддон подается к месту назначения, опускается
до полного ослабления стропов. Затем медленно начинается подъем захвата.
Вновь захватные скобы выходят из-под поддона. Цикл повторяется.
Внедрение данного захвата позволит повысить производительность процессов захвата и отцепления поддонов, чем и обуславливается достижение технико-экономического эффекта.
30
Формула изобретения
подхватных скоб с жестко закрепленными на них подвесными серьгами, отличающийс я тем, что, с целью повыгаения производительности процессов захвата и отцепления
поддонов, он снабжен траверсой с петлей для навешивания на грузоподъемное средство и шарнирно прикрепленными тягами, на концах которых закреплены пальцы, размещенные в пазу, выполненном в серьге, которая выполнена с гнездом для упомяйутой тяги и снабжена шарнирно прикрепленным к ней седлом.
Источники информации, принятые во внимание при экспертизе
W
П
IS
i8
w
/
г/r X
a , ГЛ
