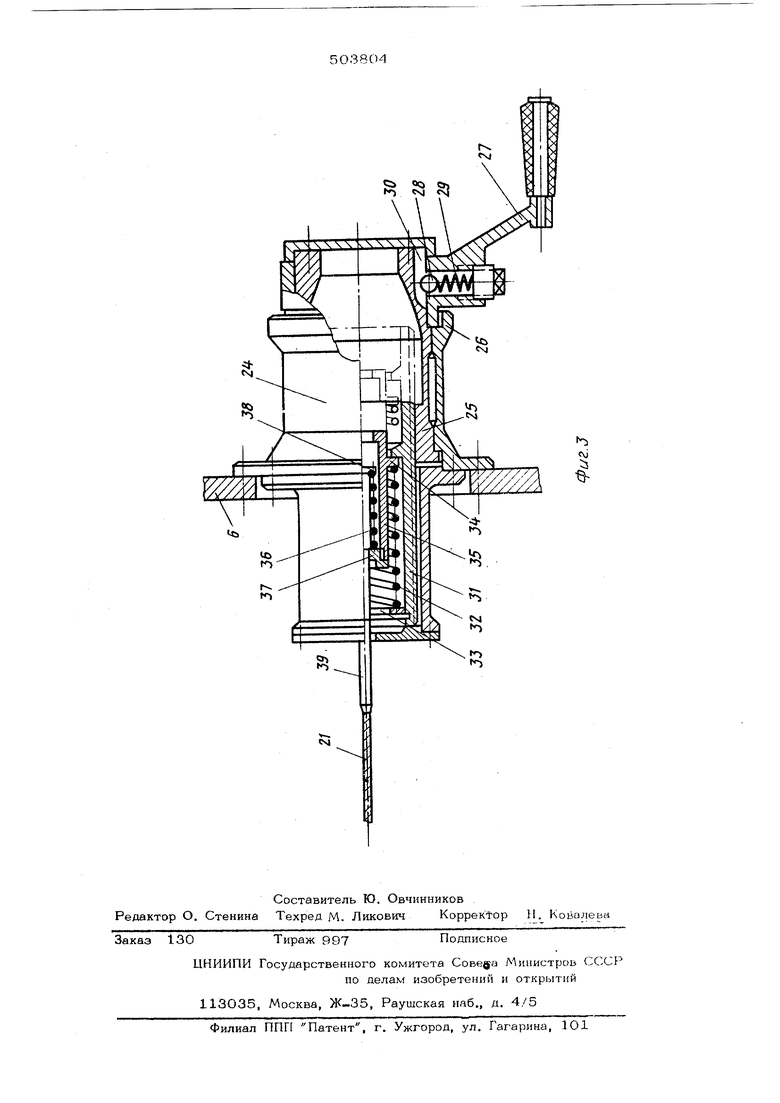
(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ТАРНОШТУЧНЫХ ГРУЗОВ iio стелке A на фиг. 1; на фиг, 3 - механизм управления грузозахватом, Попвнжная каретка 1 при помощи катков 2, посаженных на оси 3 основания 4 каретки, установлена в направляющих 5 рамы 6. Цепь 7 тягового органа, посаженная на ведущую 8 и обводную 9 звездочки, установленные на раме 6, соединена с осно ванием каретки пальцем 1О. На основании 4. каретки при оси 11 с ша эовым шарниром 12 установлен захват 13, выполненный в виде двуплечего рычага,- на одном конце которого установлен блок 14, а на другом-захватный элемент 15, выполненный в виде шарового пальца. Захватный элемент 15 входит в отверстие 16 кронштейна груза 17, имеющего скосы 18. Захват 13 в положе- НИН без груза фиксируется пружинными ну- леустановителями 19 закрепленным на основании 4, и пружиной 20, связывающей; захват 13 и основание 4 каретки. Трос 21 закрепленный одним концом на раме 6, про пущенный через блоки 22, 23 каретки и блок 14 захвата 13 и соединенный другим концом с механизмом управления 24, служит Ш1Я осуществления сцепки (расцепки ) захвата каретки с грузом.: Механизм управления 24, закрепленный на 6, представляет собой винтовой механизм. Гайка 25, посаженная в корпус 26 снабжена рукояткой 27 и соединена с ней при помощи подпружиненного шарика 28, р 1сположенного в отверстии 29 и входящего в паз ЗО гайки. В полом винте 31, ввернутом в гайку 25, расположена силовая пружина 32, опирающаяся на кольцо 33 закрепленное на винте, и на буртик 34 ста кана 35. В стакане 35 расположена компенсирующая пружина 36, опирающаяся на гайку 37, ввинченную в стакан и на буртик 38 наконечника 39, в котором заделан трос 21. Для перемещения груза подвижная ка- ретка 1 передвигается на катках 2 по направляющим 5 рамы 6 при помощи цепи 7 тягового органа так, чтобы захватный элемент 15 захвата 13 расположился напротив отверстия 16 груза 17. Сцепка захвата 13 с грузом осуществляется при помощи механизма управления 24. При вра щении гайки 25 рукояткой 27 винт 31, входя в гайку 2 5, сжимает силовую пружину 32 до определенного усилия. После этого начинает перемешаться стакан 35, натягивая трос 21, и блок 14 захвата 13 пе ремещает последний вокруг оси 11, с с шаровым щарниром 12, при этом захват ный элемент 15 входит в отверстие 16 груза 17. Каретка 1, сцепленная с грузом 17, перемещается в требуемое положение при помощи цепи 7 тягового органа . Скосы 18 в отверстии 16 груза препятствуют самопроизвольной расцепке подвижной каретки 1 с грузом, поскольку при возникновении тягового усилия захватный элемент 15 затягивается по скосам 18 в отверстие 16. Пружина 36 механизма управления служит для компенсации вытяжки троса 21 при эксплуатации устройства. При смешении троса во время передвижения захват может менять свое положение и в этом .-,.-случае силовая пружина 32 сжимается или ослабевает, предохраняя трос от обрыва. Для создания заданного усилияпри сжатии силовой пружины служит подпружиненный шарик 28, сцепл1пощий рукоятку 27 с гайкой 25 до создания определенного усилия в силовой пружине 32. В случае смещения груза от номинального положения относительно устройства для перемещения шаровой захватный элемент 15 и щаровой шарьнир 12, обеспечиваа плавание захвата 13,. исключает передачу изгиба и кручения на основание 4 каретки от груза при возникновении тягового усилия и, следовательно, предохраняют каретку 1 от поломок. Расцепка захвата 13 с грузом 17 про- изводится также при помоши механизма управления 24. При вращении гайки 25 рукояткой 27 винт 31 реремещается, и наконечник 39, связанный с тросом 21, вы ходит из корпуса 26 механизма управле- ния, уменьщая натяжение троса 21. цо момента выхода gaxBaTHoro элемента 15 из отверстия 16 груза 17. Формула изобретения 1. Устройство для перемещения тарно- штучных грузов, например, контейнеров внутри склада, содержащее раму с направляющими, на которых установлена соединенная с тяговым органом каретка, снабженная щарнирно--закрепленным на ней захватом для груза, отличающееся тем, что, с целью обеспечения сцепки (расцепки) захвата с грузом в любом месте на пути его перемещения и обеспечения при этом дистанционного управления, захват выполнен в виде подпружиненного качающегося двуплечего рычага, на одном плече которого закреплен захватный элемент, а на другом-блок, через который пропущен гибкий управляющий орган, взаимодействующий с направляющими блоками, установленными на I каретке, причем гибкий управляющий орган одним концом закреплен на раме, а другим соединен с механизмом управле-
ния грузоэахватом, смонтированным также на раме.,
2.Устройство по п, 1, о т л и ч а ющ е е с я тем, что механизм jiправления грузоэахватом выполнен в виде заключенной в корпусе пары винт-гайка, снабженной р/кояткой.
3. Устройство по пп, 1, 2, о т л и ч аю щ е е с я тем, что, с целью обеспечения заданного усилия натяжения гибкого управ- ляющего органа и компенсации его вытяжки
в процессе эксплуатации, винт соединен с . гибким органом при помощи компенсирующей пружины, заключенной в стакан, глшр/по шийся на силовую пружину, насгажсмпук ил винт, а гайка соединена с г.укояткоГ при помощи муфты предельного моменто,
4.Устройство по п. 1, о т л и ч .4 Kirn е е с я тем, что, с целью исключония передачи изгибающих и крутящих моментов на каретку, двуплечий рыча:- устаноЕ лен на каретке при помощи сферического шарнира ,
5.Устройство по п. 1, о т л и ч а ю щ е е ся тем, что захватный элемеич выполнен D виде полусферы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки в горизонтальной плоскости грузов,преимущественно контейнеров | 1977 |
|
SU735532A1 |
| Силовой тренажер | 1990 |
|
SU1780777A1 |
| Устройство для разработки высокопрочных грунтов | 1982 |
|
SU1040069A1 |
| Балансирный механизм грузозахватного устройства | 1985 |
|
SU1353715A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Сцепное устройство двухосного сочлененного транспортного средства | 1983 |
|
SU1122524A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| АВТОПОЕЗД | 1997 |
|
RU2131369C1 |
| РАЗЪЕМНО-СЦЕПНОЙ МЕХАНИЗМ СЕДЕЛЬНО-СЦЕПНОГО УСТРОЙСТВА ТРАНСПОРТНОГО СРЕДСТВА | 1971 |
|
SU421559A1 |